

Тема 1.9. Простейшие виды движения твёрдого тела.
Поступательное движение твёрдого тела.
Вращательное движение твёрдого тела относительно неподвижной оси.
Траектории, скорости и ускорения точек вращающегося твёрдого тела.
Передачи вращательного движения.
1.9.1. Поступательным движением твердого тела называется такое движение, при котором всякая прямая, неизменно связанная с этим телом, движется, оставаясь параллельной своему натлыному положению.
Примерами поступательного
движения тела могут служить: движение
кузова автомашины, движущейся по
прямолинейному пути, движение поршня
двигателя и т. д. Неправильно,
однако, думать, что при поступа
–тельном движении тела траектории
его точек должны быть непременно
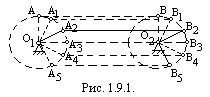
прямыми линиями. Так, например, спарник
АВ (рис.
1.9.1.), соединяющий кривошипы
![]() и
и
![]() двух соседних колее
паровоза, совершает поступательное
движение, хотя его точки и будут
двигаться по окружностям. В самом деле,
при вращении кривошипов
и
вокруг их осей
двух соседних колее
паровоза, совершает поступательное
движение, хотя его точки и будут
двигаться по окружностям. В самом деле,
при вращении кривошипов
и
вокруг их осей
![]() и
и
![]() положение спарника АВ
будет изменяться.
Но при равенстве длин кривошипов и при
длине спарника, равной расстоянию между
осями
положение спарника АВ
будет изменяться.
Но при равенстве длин кривошипов и при
длине спарника, равной расстоянию между
осями
![]() ,
четырехугольник
,
четырехугольник
![]() будет всегда оставаться
параллелограммом, следовательно,
спарник АВ будет
всегда параллельным основанию
,
т. е. движется, оставаясь
параллельным своему начальному положению.
В то же время точки А
и В
спарника, а следовательно,
и все остальные его точки движутся по
окружностям, радиус которых равен длине
кривошипа.
будет всегда оставаться
параллелограммом, следовательно,
спарник АВ будет
всегда параллельным основанию
,
т. е. движется, оставаясь
параллельным своему начальному положению.
В то же время точки А
и В
спарника, а следовательно,
и все остальные его точки движутся по
окружностям, радиус которых равен длине
кривошипа.
Траекториями точек тела при его поступательном движении могут быть какие угодно кривые: прямолинейное движение тела есть только частный случай поступательного движения.
Заметим также, что термин «поступательное движение» применим только к движению тела, но не к движению одной точки. Понятие «движется, оставаясь параллельной своему начальному положению» никак не применимо к точке, не имеющей размеров.
Теорема. При поступательном движении твердого тела все его точки движутся по одинаковым (при наложении совпадающим) траекториям и имеют в каждый данный момент равные скорости и равные ускорения.
Из теоремы следует, что поступательное движение тела вполне определяется движением какой-либо одной его точки. Таким образом, задача изучения поступательного движения твёрдого тела сводится к уже рассмотренным ранее задачам кинематики точки.
Скорость и ускорение, общие для всех точек поступательно движущегося тела, называются скоростью и ускорением этого тела.
Заметим, что говорить о скорости и ускорении тела можно только в случае его поступательного движения. Во всех остальных случаях различные точки тела имеют различные скорости и различные ускорения.
1 .9.2.
Вращательным движением называется
такое движение твердого тела, при котором
все его точки, лежащие на некоторой
прямой, называемой осью вращения,
остаются неподвижными. ( Вращающееся
тело может и не иметь своих точек на
геометрической оси вращения, т. е. не
иметь само неподвижных точек. Например,
колесо, надетое на материальную ось,
или человек, сидящий на карусели. Но
если точки, расположенные на геометрической
оси вращения, неизменно присоединить
к вращающемуся телу, то они будут
оставаться неподвижными при вращении
тела.)
.9.2.
Вращательным движением называется
такое движение твердого тела, при котором
все его точки, лежащие на некоторой
прямой, называемой осью вращения,
остаются неподвижными. ( Вращающееся
тело может и не иметь своих точек на
геометрической оси вращения, т. е. не
иметь само неподвижных точек. Например,
колесо, надетое на материальную ось,
или человек, сидящий на карусели. Но
если точки, расположенные на геометрической
оси вращения, неизменно присоединить
к вращающемуся телу, то они будут
оставаться неподвижными при вращении
тела.)
Для того чтобы осуществить вращательное движение тела, достаточно закрепить неподвижно две какие-нибудь его точки (например, при помощи подшипника А и подпятника В, рис. 1.9.2.), тогда прямая, проходящая через эти две точки, будет осью вращения тела. При вращательном движении тела различные его точки движутся, вообще говоря, по-разному. Однако и для вращательного движения можно отыскать такие кинематические характеристики, которые были бы общими для всех точек тела.
Пусть какое-нибудь твердое тело (изображенное для простоты на рис. 1.9.2. в виде цилиндра) вращается вокруг неподвижной оси г. Проведем через ось вращения z неподвижную полуплоскость 1 и полуплоскость 11, неизменно связанную с вращающимся телом.
Угол
![]() между двумя полуплоскостями, проходящими
через ось вращения тела, неподвижную
и неизменно связанную с вращающимся
телом, называется
углом поворота тела.
между двумя полуплоскостями, проходящими
через ось вращения тела, неподвижную
и неизменно связанную с вращающимся
телом, называется
углом поворота тела.
Установим на оси вращения z положительное направление и условимся считать угол поворота тела положительным, когда он отсчитывается от неподвижной плоскости 1 в сторону, противоположную вращению часовой стрелки, если смотреть на него с положительного конца оси вращения. Заданием величины и знака угла поворота вполне определяется положение полуплоскости 11 и неизменно связанного с ней вращающегося тела.
При вращении тела вокруг оси г угол поворота тела изменяется с течением времени, следовательно, он является некоторой функцией времени:
![]() .
(1.9.1.)
.
(1.9.1.)
Уравнение (1.9.1.), устанавливающее зависимость между углом поворота тела и временем его движения, называется уравнением вращательного движения тела. Этим уравнением вполне определяется вращательное движение тела, так как для каждого момента времени t можно найти соответствующее ему значение угла поворота тела и тем самым определить положение тела в этот момент.
Угол поворота в механике
обычно измеряют в радианах.
Иногда в практических задачах угол
поворота выражают числом оборотов
![]() тела. Принимая во внимание, что один
оборот тела, т. е. его поворот на 360°,
соответствует
тела. Принимая во внимание, что один
оборот тела, т. е. его поворот на 360°,
соответствует
![]() радиан, мы получаем зависимость между
углом
поворота тела в радианах и числом
его оборотов:
радиан, мы получаем зависимость между
углом
поворота тела в радианах и числом
его оборотов:
![]() .
.
Пусть за некоторый промежуток
времени
![]() угол
получил приращение
угол
получил приращение
![]() .
Величина
.
Величина
![]() называется средней
угловой скоростью тела
за данный промежуток времени.
Предел, к которому
стремится средняя угловая скорость при
стремящимся к нулю, называется угловой
скоростью тела в
данный момент времени
,
называется средней
угловой скоростью тела
за данный промежуток времени.
Предел, к которому
стремится средняя угловая скорость при
стремящимся к нулю, называется угловой
скоростью тела в
данный момент времени
,
![]() .
(1.9.2.)
.
(1.9.2.)
Значение угловой скорости
тела для данного момента времени может
быть положительным или отрицательным
в зависимости от того, в какую сторону
вращается тело. Когда тело вращается
против часовой стрелки, если смотреть
с положительного конца оси вращения,
то
![]() и угловая скорость
и угловая скорость
![]() положительна. Если тело вращается по
часовой стрелке, то угловая скорость
отрицательна. Следовательно, знак
угловой скорости указывает, в какую
сторону в данный момент вращается тело.
положительна. Если тело вращается по
часовой стрелке, то угловая скорость
отрицательна. Следовательно, знак
угловой скорости указывает, в какую
сторону в данный момент вращается тело.
Исходя из определения угловой скорости, можно найти и ее размерность:
![]() .
.
Так как угол в механике
измеряется в радианах, а время — в
секундах, то угловая
скорость измеряется в радианах в секунду
(![]() ).
).
На практике часто угловую
скорость тела выражают не в радианах в
секунду, а так называемой частотой
вращения, выраженной
числом оборотов в минуту, обозначая
ее буквой
![]() .
Нетрудно найти зависимость между
и
.
.
Нетрудно найти зависимость между
и
.
Так как один оборот тела соответствует его повороту на угол в радиан, то
![]()
Таким образом, получаем важную для практики зависимость между угловой скоростью тела в радианах в секунду и его угловой скоростью п в оборотах в минуту:
![]()
(1.9.3.)
Нужно помнить, что в этой формуле всегда выражается в рад/с, а п — в об/мин.
Если тело вращается неравномерно, т. е. если приращения угла поворота тела за равные промежутки времени не равны, то его угловая скорость изменяется с течением времени и будет являться, следовательно, также некоторой функцией времени:
![]() .
.
Величина, характеризующая быстроту изменения угловой скорости тела, называется его угловым ускорением.
Пусть за некоторый промежуток
времени
угловая скорость
получила приращение
![]() .
Величина
.
Величина
![]() называется средним
угловым ускорением тела
за данный промежуток времени
.
Предел, к которому
стремится среднее угловое ускорение
при
стремящемся к нулю, называется угловым
ускорением тела в
данный момент времени
,
называется средним
угловым ускорением тела
за данный промежуток времени
.
Предел, к которому
стремится среднее угловое ускорение
при
стремящемся к нулю, называется угловым
ускорением тела в
данный момент времени
,
![]() .
(1.9.4.)
.
(1.9.4.)
Учитывая формулу (1.9.2.), получим для углового ускорения:
![]() .
(1.9.5.)
.
(1.9.5.)
Единица
углового ускорения в Международной
системе единиц (СИ) – радиан
в секунду в квадрате (![]() ).
).
Если
![]() ,
то
,
то
![]() ,
если
,
если
![]() ,
то
,
то
![]() .
В том случае, когда знаки угловой
скорости
и углового ускорения
.
В том случае, когда знаки угловой
скорости
и углового ускорения
![]() совпадают,
вращательное движение называется
ускоренным,
когда противоположны – замедленным.
совпадают,
вращательное движение называется
ускоренным,
когда противоположны – замедленным.
1.9.3. При вращении тела вокруг неподвижной оси все его точки описывают окружности, лежащие в плоскостях, перпендикулярных к оси вращения z. Центры этих окружностей лежат на оси вращения и, следовательно, радиус каждой из них равен расстоянию соответствующей точки тела от оси вращения.
О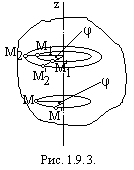 чевидно,
что радиусы всех данных окружностей
поворачиваются за один и тот же
промежуток времени
на один и тот же
угол
чевидно,
что радиусы всех данных окружностей
поворачиваются за один и тот же
промежуток времени
на один и тот же
угол
![]() ,
равный приращению угла
поворота тела за этот промежуток времени,
однако точки, лежащие на разных расстояниях
от оси вращения (точки
и
на рис. 1.9.3.), опишут при этом дуги различной
длины.
,
равный приращению угла
поворота тела за этот промежуток времени,
однако точки, лежащие на разных расстояниях
от оси вращения (точки
и
на рис. 1.9.3.), опишут при этом дуги различной
длины.
Зная угловую скорость тела и расстояние какой-нибудь точки М тела от оси вращения, можно найти и скорость этой точки (Скорость точки вращающегося тела, характеризующую своим модулем быстроту ее движения по дуге траектории (измеряемой в линейных единицах), иногда называют линейной скоростью в отличие от угловой скорости тела, характеризующей быстроту изменения угла его поворота.):
![]()
Численное значение скорости точки вращающегося тела равно произведению угловой скорости тела на расстояние данной точки от оси вращения:
![]() (1.9.6.)
(1.9.6.)
Направлен вектор скорости точки по касательной к траектории точки, следовательно, перпендикулярно к ее радиусу вращения, в сторону движения точки. Из формулы (1.9.6.) следует, что скорости точек вращающегося тела пропорциональны расстояниям этих точек от оси вращения.
Учитывая формулу (1.9.3.) ,получим для линейной скорости:
![]() ,
(1.9.7.)
,
(1.9.7.)
где d—диаметр вращающегося цилиндрического тела, п— число оборотов тела в минуту.
При любом вращательном движении тела скорость v его точек непременно изменяется (только по направлению при равномерном вращательном движении или по направлению и по модулю при неравномерном вращательном движении), следовательно, точки вращающегося тела всегда движутся с некоторым ускорением.
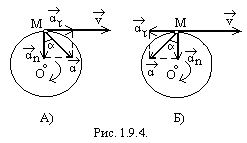
Ускорение точки вращающегося
тела, как и ускорение всякого криволинейного
движения, может быть разложено на
касательное ускорение
и
нормальное ускорение
![]() :
:
![]() ,
(1.9.8.)
,
(1.9.8.)
![]() (1.9.9.)
(1.9.9.)
Направление вектора касательного ускорения точки совпадает с направлением вектора ее скорости при ускоренном вращении тела (рис. 1.9.4., А) и противоположно скорости в случае замедленного вращения (рис. 1.9.3., Б). Вектор же нормального ускорения точки всегда направлен по радиусу окружности, описываемой точкой, к центру этой окружности (рис. 1.9.4.).
Зная касательное и нормальное ускорения точки, всегда можно (при необходимости) найти модуль и направление ускорения , являющегося диагональю прямоугольника, построенного на векторах и (рис. 1.9.4.):
![]()
![]() .
(1.9.10.)
.
(1.9.10.)
1.9.4. Передача вращательного движения от одной машины к другой или внутри машины от одного ее вала к другому осуществляется разнообразными механизмами, носящими название передач.
Передачи могут быть разделены на передачи гибкой связью (ременную, канатную, цепную) и передачи, осуществляемые путем непосредственного соприкосновения (фрикционную, зубчатую и др.).
Валы и закрепленные на них шкивы и колеса называются ведущими, когда они передают движение, и ведомыми, когда они его воспринимают.
Отношение угловых скоростей двух валов (шкивов или колес) называется передаточным отношением.
Так как угловая скорость тела в рад/с пропорциональна (формула (1.9.3.) ) его угловой скорости n в об/мин, то, обозначая передаточное отношение буквой и с соответствующим двойным индексом, будем иметь
![]() или
или
![]() .
.
1. Передаточное отношение ременной передачи равно обратному отношению радиусов (или диаметров) шкивов.
![]() .
.
2. Передаточное отношение цилиндрической фрикционной передачи равно обратному отношению радиусов (или диаметров) колес:
![]() .
.
3. Передаточное отношение двух находящихся в зацеплении зубчатых колес равно обратному отношению их чисел зубьев.
![]()
 Многоступенчатой
передачей называется
механизм, состоящий из ряда соединенных
между собой простых передач.
Многоступенчатой
передачей называется
механизм, состоящий из ряда соединенных
между собой простых передач.
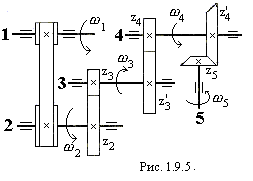
На рис. 1.9.5. изображена в качестве примера схема многоступенчатой передачи от вала 1 к валу 5, состоящей из ременной передачи, двух пар цилиндрических зубчатых колес и одной пары конических зубчатых колес.
Шкивы и колёса жёстко
закреплены на соответствующих валах
(это обозначено на схеме крестиками).
Диаметры шкивов
![]() и
и
![]() .
Числа зубьев колёс обозначены буквой
z
с соответствующими индексами.
.
Числа зубьев колёс обозначены буквой
z
с соответствующими индексами.
Передаточное отношение
данной передачи
![]() .
.
Передаточные отношения простых передач, входящих в состав данной многоступенчатой передачи,
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
Перемножив почленно передаточные отношения, найдём
![]() .
.
Таким образом, передаточное отношение многоступенчатой передачи равно произведению передаточных отношений всех входящих в её состав простых передач:
![]() .
.
Передаточное отношение многоступенчатой передачи можно вычислить, зная, как определяются передаточные отношения простых передач, входящих в её состав.
Для двухступенчатой передачи цилиндрическими зубчатыми колесами от вала 2 к валу 4, изображенной на рис. 1.9.5, передаточное отношение
![]() .
.
Для всей многоступенчатой передачи от вала 1 к валу 5 абсолютное значение передаточного отношения
![]() .
.
П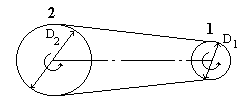 ример
1. Шкив 2
приводится в движение из состояния
покоя бесконечным ремнем от шкива 1
двигателя. Диаметры шкивов:
ример
1. Шкив 2
приводится в движение из состояния
покоя бесконечным ремнем от шкива 1
двигателя. Диаметры шкивов:
![]() ,
; угловое ускорение
шкива 1
в период пуска двигателя постоянно и
равно
,
; угловое ускорение
шкива 1
в период пуска двигателя постоянно и
равно
![]() рад/с2.
Определить частоту вращения шкива
2
через 15 с после начала движения.
рад/с2.
Определить частоту вращения шкива
2
через 15 с после начала движения.
Решение. Так как угловое
ускорение постоянно, то угловая скорость
![]() шкива 1
через 15 с после пуска двигателя
шкива 1
через 15 с после пуска двигателя
![]() рад/с.
рад/с.
Передаточное отношение между шкивами
![]() .
.
Отсюда угловая скорость шкива 2 через 15 секунд
![]() рад/с
рад/с
и тогда его частота
![]() об/мин.
об/мин.
Данную задачу можно было бы решить и
иначе. Отношение угловых ускорений двух
валов также равно передаточному
отношению между ними:
![]() .
Пользуясь этим, можно было бы, не
определяя угловой скорости шкива 1,
определить по передаточному отношению
угловое ускорение шкива
2, а затем его угловую скорость по
формуле
.
Пользуясь этим, можно было бы, не
определяя угловой скорости шкива 1,
определить по передаточному отношению
угловое ускорение шкива
2, а затем его угловую скорость по
формуле
![]() .
.