

Лабораторная работа №4 Модель схемы компенсатора в LabView
1. Цель работы: изучить компенсационный метод с учетом погрешностей применяемых технических средств измерения.
2. Теория
Компенсационная схема имеет два источника питания: изменяемое напряжение Ux и опорное (образцовое) напряжение U0 (рис.4.1).
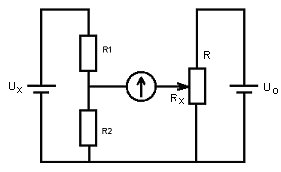
Рисунок 4.1 – Схема измерения напряжения компенсационным методом
Измеряемое напряжение, измененное делителем напряжения, будет равно
где k – коэффициент делителя напряжения, k = R2/(R1 + R2).
Напряжение, снимаемое с потенциометра R, будет равно

где Rx – сопротивление между движком и нижним выводом потенциометра; R – полное сопротивление потенциометра.
Токи от двух источников питания направлены встречно. Следовательно, изменяя сопротивление Rx потенциометра, можно добиться равенства токов, а это возможно при условии

Тогда
 (4.1)
(4.1)
Потенциометр (рис.4.2) состоит из каркаса 1, на который намотан провод 2, изготовленный из материала с высоким удельным сопротивлением, и токосъемного движка 3, укрепленного на оси . Движок касается провода 2. В показанной конструкции контакт с подвижным движком осуществляется с помощью неподвижного токосъемного кольца 4.
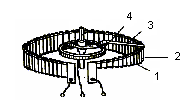
Рисунок 4.2 – Внешний вид потенциометра без корпуса
Для намотки используется проволока малого диаметра (константан, сплав платины, золота), так как чем меньше диаметр, тем меньше ступенчатость статической характеристики (рис.4.3).
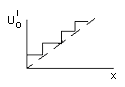
Рисунок 4.3 – Зависимость напряжения выхода потенциометра
от перемещения движка
Погрешность потенциометра обусловлена скачкообразным изменением сопротивления ΔR при переходе движка с одного витка на другой. Если в качестве номинальной функции преобразования принять функцию, проходящую посредине "ступенек", то максимальное значение приведенной погрешности, обусловленное дискретностью
δR = ±ΔR/(2R), (4.2)
где R - полное сопротивление преобразователя.
3. Порядок выполнения работы
1). Запустить программу LabVIEW и после открытия файла (Компенсационный метод.vi) должно появиться модель схемы (рис.4.4).
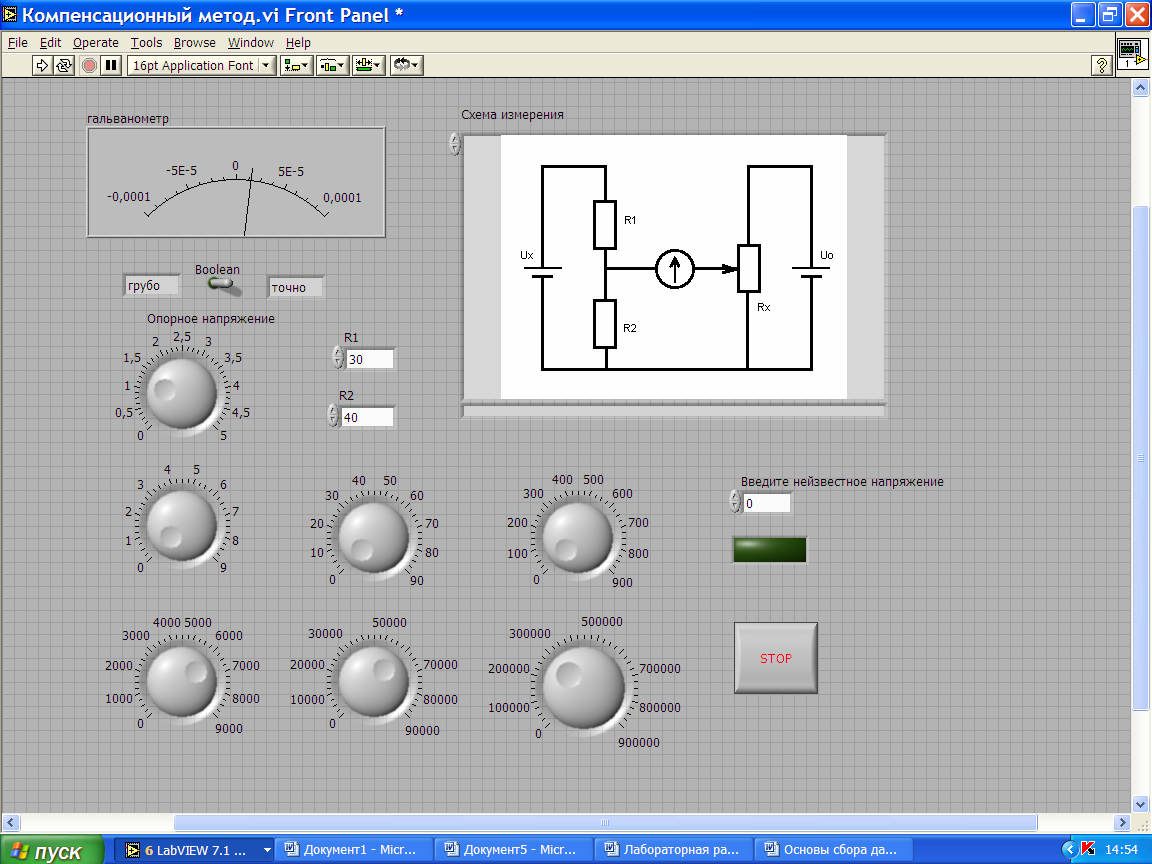
Рисунок 4.4 – Лицевая панель модели компенсатора
На схеме приведены: шкала гальванометра; переключатель с двумя положениями «грубо» (слева) и «точно» (справа), регулятор опорного напряжения, блок для ввода значений сопротивлений R1 и R2, кнопка «STOP». Кнопка «STOP» служит для выключения виртуального прибора.
2). Сопротивление потенциометра равно R = 1кОм. Набрать следующие данные: R1 = 500 Ом и R2 = 500 Ом (к = 0,5); U0 = 5B и Ux = 4В.
3). Установить переключатель в положение «грубо» (влево) и изменяя сопротивление потенциометра Rx – магазин сопротивлений, добиться нулевого положения стрелки гальванометра. После чего необходимо перевести переключатель в положение «точно» (вправо) и произвести действия повторно.
Если компенсация достигнута, то загорается лампочка «Верно».
4. Задание
Рассчитать по формуле (4.1) неизвестное напряжение Ux с учетом того, что приведенная погрешность сопротивления потенциометра R = 1кОм равна δR = ±0,01%.
5. Содержание отчета
- цель работы;
- схема компенсатора;
- расчет напряжения Ux;
- выводы.
6. Контрольные вопросы
1) В чем заключается метод компенсации?
2) От чего зависит точность измерения компенсатора?
3) Какие достоинства компенсационного метода?
4) Какие основные недостатки?
5) Можно ли использовать потенциометр в качестве датчика угла?
6) Какие основные недостатки потенциометра?