

Регулирующие органы
(поворотные заслонки, жалюзи, дроссельные клапаны и т.д.)
Правильно выбранный РО не должен искажать характеристику объекта.
С помощью РО можно улучшить характеристику объекта регулирования. Для этого используют изменения кинематических связей между РО и исполнительными механизмами.
Экспериментальное определение динамических свойств промышленного объекта управления. (ПОУ)(прокатный стан, печь и т.д.)
Динамические свойства ПОУ обычно определяются по переходным процессам и частотным характеристикам, полученным в результате экспериментов.
Перед экспериментом :
изучается конструкция ПОУ, аппаратура и регуляторы. Анализируется работа регистрирующих устройств в процессе нормальной эксплуатации. Определяются возможные источники возмущающих воздействий.
Составляется структурная схема
ПОУ




Датчики входной величины
Датчики выходной величины
Регистрирующие у-ва

Опыт производится с момента введения входных возмущающих воздействий и с момента установления выходной величины ПОУ.
В случае , если после внесения воздействия через некоторое время п.п. не установится, а выходные характеристику ПОУ приближаются к предельным или выше чем нормальные характеристики то воздействие следует уменьшать Алгебраическая сумма этих воздействий даёт импульсное воздействие и в результате получается импульсная переходная функция.

Импульсная характеристика представляет сумму двух переходных характеристик W(t) которые направлены в разные стороны и сдвинуты относительно друг друга на время действия импульса .
Для перестройки импульсной характеристики в переходную используют принцип наложения: - ординаты полученной импульсной переходной функции на участке
t0 - t1 заменяют на участке t1-th добавить каждой точке имп. характеристики ординаты этой же характеристики, сдвинутые вправо на время действия импульса.
При снятии переходной характеристики в статистическом объекте удалось зарегистрировать только начальную часть характеристики, достаточно представительную, то остальная часть может быть экстраполирована.
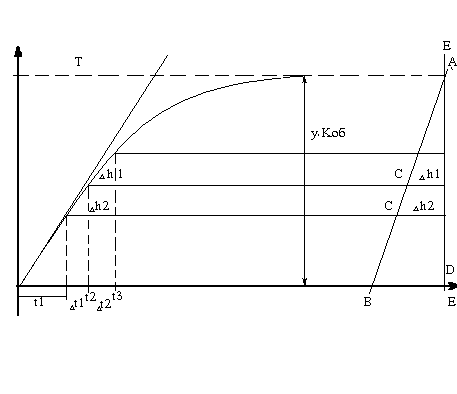
Д ля
этого на экспериментальной кривой
выбирается две точки для одинаковых
интервалов определяются соответствующие
отрезки ординаты h1
h2.
Эти отрезки откладываются на прямой
ЕЕ как показано на рисунке. Через точки
С и С проводят прямую АВ до пересечения
с 0Е, которое определяет новое ,
установившееся значение новой координаты,
что позволяет найти постоянную времени
t
и коэффициент усиления объекта К.
ля
этого на экспериментальной кривой
выбирается две точки для одинаковых
интервалов определяются соответствующие
отрезки ординаты h1
h2.
Эти отрезки откладываются на прямой
ЕЕ как показано на рисунке. Через точки
С и С проводят прямую АВ до пересечения
с 0Е, которое определяет новое ,
установившееся значение новой координаты,
что позволяет найти постоянную времени
t
и коэффициент усиления объекта К.
Аппроксимация динамических характеристик.
Особенности характеристик ПОУ позволяют аппроксимировать их переходные функции дробно-рациональными функциями с введением в случае необходимости транспортного запаздывания.

В первоначальных расчётах используется критерий приближенности, основанный на разложении действительных переходных характеристик объекта в ряд Тейлора в окрестностях точки и её перегиба.
Условия приближения:
Если h(t) - действительная переходная характеристика полученная экспериментальным путём ha(t) -её аппроксимация.
Наилучшее приближение в случае когда:
h(t)перегиба = ha(t)перегиба
производные
dh(t)перегиба/dt = d ha(t)перегиба/dt
коэффициенты передачи объекта:
h= ha =Kобъекта
