

1.6. Построение кинематических диаграмм выходного звена.
Диаграмму перемещения
выходного звена 5
строим в первую очередь, т.к. значения
перемещения
![]() известны в 12-ти положениях механизма.
По оси ординат откладываем значения
перемещения
с учетом масштабного коэффициента
известны в 12-ти положениях механизма.
По оси ординат откладываем значения
перемещения
с учетом масштабного коэффициента
![]() [м/мм], а по оси абсцисс откладываем время
t.
С учетом того, что время одного полного
оборота кривошипа представлено
на диаграмме отрезком длиной 180 мм,
масштабный коэффициент времени
[м/мм], а по оси абсцисс откладываем время
t.
С учетом того, что время одного полного
оборота кривошипа представлено
на диаграмме отрезком длиной 180 мм,
масштабный коэффициент времени
![]() .
.
Диаграмму скорости выходного звена строим графическим дифференцированием диаграммы перемещения, используя метод касательных.
Задаемся полюсным отрезком интегрирования H1 = 60 мм. Тогда масштабный коэффициент перемещения по оси ординат равен
![]() .
.
Диаграмму ускорения выходного звена строим графическим дифференцированием диаграммы скорости также методом касательных.
Задаемся полюсным отрезком дифференцирования H2 = 20 мм. Тогда масштабный коэффициент ускорения по оси ординат:
![]() .
.
1.7. Силовой анализ механизма.
Целью силового анализа является определение реакций звеньев в кинематических парах механизма, а также уравновешивающего момента, который уравновешивает систему заданных активных сил и сил инерций. Для силового расчета механизма будем использовать метод кинетостатики.
Рассмотрим расчетное (2-е) положение механизма.
Определяем активные силы, действующие на звенья механизма.
На звенья 1, 3 и 5 действуют силы тяжести, приложенные в соответствующих центрах тяжести звеньев:

На выходное звено
5
на рабочем ходу действует сила полезного
сопротивления
,
значение которой изменяется в соответствии
с заданной диаграммой нагрузки, а на
холостом ходу – постоянная сила
сопротивления
![]() = 710 [Н]. Расчетное (2-е) положение механизма
соответствует рабочему ходу, поэтому,
согласно диаграмме, принимаем
= 710 [Н]. Расчетное (2-е) положение механизма
соответствует рабочему ходу, поэтому,
согласно диаграмме, принимаем
![]() [Н].
[Н].
Определим инерционную нагрузку, действующую на звенья механизма. Совокупность сил инерции, действующих на каждое отдельное звено, приводим к главному вектору и главному моменту сил инерции этого звена.
Сначала рассчитаем главные векторы сил инерции звеньев:
![]() ,
т.к. центр тяжести S1
неподвижен;
,
т.к. центр тяжести S1
неподвижен;
![]() [Н];
[Н]; ![]() [Н].
[Н].
Главные векторы сил инерции направлены противоположно векторам ускорений центров тяжести соответствующих звеньев.
Рассчитаем главные моменты сил инерции звеньев:
![]() ;
;
![]() [Н·м].
[Н·м].
Главные моменты сил инерции направлены противоположно угловым ускорениям соответствующих звеньев.
Согласно принципу Даламбера, заданный рычажный механизм можно формально рассматривать находящимся в состоянии равновесия под действием приложенных активных сил, инерционных сил, и уравновешивающего момента Mур, который, по сути, является реактивным моментом, действующим на вал входного звена 1 со стороны выходного вала редуктора.
Разделим механизм на группы Ассура и входное звено, заменив отброшенные связи (т.е. звенья) реакциями, и поочередно рассмотрим их равновесие.
Для удобства и
наглядности решения задачи изображаем
на чертежном листе группы Ассура и
входное звено с масштабным коэффициентом
![]() и показываем направления всех сил,
приложенных к звеньям.
и показываем направления всех сил,
приложенных к звеньям.
Сначала рассмотрим группу Ассура 4–5. Составляем векторное уравнение равновесия системы сил, действующих на звенья группы:
![]()
Рассмотрим отдельно звено 4 (рис. 2).
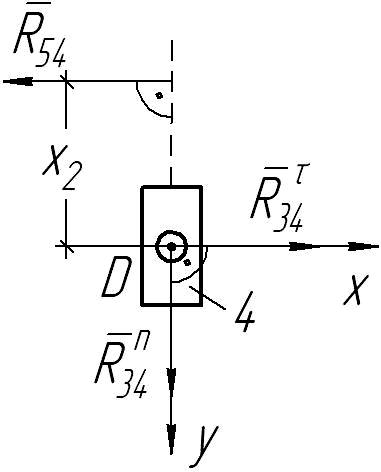
Рис. 2. Схема нагружения кулисного камня 4
Вводим вспомогательную локальную систему координат xDy и составляем три уравнения равновесия звена 4:

Из первого уравнения
следует, что
![]() .
Из третьего уравнения следует, что x2
= 0, следовательно, вектор реакции
.
Из третьего уравнения следует, что x2
= 0, следовательно, вектор реакции
![]() проходит через точку D.
проходит через точку D.
Строим план сил
группы Ассура 4–5
согласно векторному уравнению. Принимаем
масштабный коэффициент
![]() .
.
Рассчитываем длины отрезков, изображающих векторы сил на плане сил:
![]() [мм];
[мм]; ![]() [мм];
[мм];
![]() [мм].
[мм].
Решение уравнения
на плане сил получаем, проводя линии
действия неизвестных реакций
![]() и
и
![]() до их пересечения. Реакцию
до их пересечения. Реакцию
![]() во внутренней кинематической паре
группы найдем из условия равновесия
звена 5:
во внутренней кинематической паре
группы найдем из условия равновесия
звена 5:
![]()
Т.к. в этом уравнении известны все силы, кроме искомой реакции , то её вектор можно построить замыканием четырех известных векторов сил на плане сил.
После построения плана сил из него можно найти:
![]() [Н];
[Н];
![]() [Н];
[Н]; ![]() [Н].
[Н].
Для определения координаты точки приложения равнодействующей реакции составим уравнение равновесия звена 5 в виде:
![]() ;
;
![]() [м].
[м].
Знак «–» означает, что равнодействующая приложена слева от точки S5.
Рассматриваем следующую группу Ассура 2–3.
Составляем векторное уравнение равновесия группы:
![]()
Рассмотрим отдельно звено 2 (рис. 3).
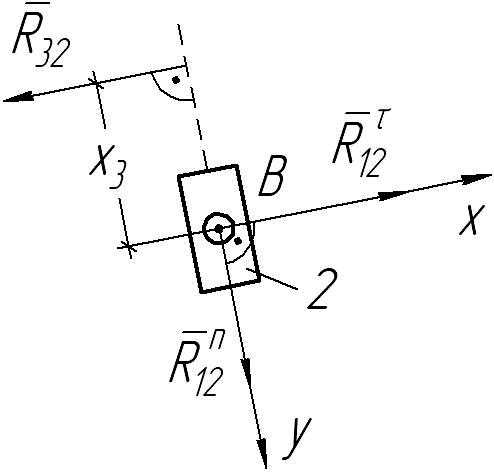
Рис. 3. Схема нагружения кулисного камня 2
Вводим вспомогательную локальную систему координат xBy и составляем три уравнения равновесия звена 2:

Из первого уравнения
следует, что
![]() .
Из третьего уравнения следует, что x3
= 0, следовательно, вектор реакции
.
Из третьего уравнения следует, что x3
= 0, следовательно, вектор реакции
![]() проходит через точку B.
проходит через точку B.
Величину реакции
![]() можно определить, составив уравнение
равновесия группы в целом:
можно определить, составив уравнение
равновесия группы в целом:
![]() ;
;

Строим план сил
группы Ассура 2–3
согласно векторному уравнению. Принимаем
масштабный коэффициент
![]() [Н/мм].
[Н/мм].
Рассчитываем длины отрезков, изображающих векторы сил на плане сил:
![]() [мм];
[мм]; ![]() [мм];
[мм];
![]() [мм];
[мм]; ![]() [мм].
[мм].
Т.к. в этом уравнении
известны все силы, кроме искомой реакции
![]() ,
то её можно построить простым замыканием
многоугольника сил. Реакцию
,
то её можно построить простым замыканием
многоугольника сил. Реакцию
![]() во внутренней кинематической паре
группы найдем из
условия равновесия звена 3:
во внутренней кинематической паре
группы найдем из
условия равновесия звена 3:
![]()
Вектор строим замыканием векторов остальных сил на плане сил.
После построения плана сил из него находим:
![]() [Н];
[Н]; ![]() [Н].
[Н].
Рассмотрим равновесие входного звена механизма.
Запишем векторное уравнение равновесия:
![]()
Строим план сил
входного звена 1
согласно векторному уравнению. Принимаем
масштабный коэффициент
![]() .
.
Длины отрезков, изображающих векторы сил на плане сил:
![]() [мм];
[мм]; ![]() [мм].
[мм].
В уравнении
равновесия известны все силы, кроме
![]() ,
поэтому её можно легко построить
замыканием многоугольника сил.
,
поэтому её можно легко построить
замыканием многоугольника сил.
После построения плана сил из него находим:
![]() [Н].
[Н].
Для определения величины уравновешивающего момента запишем уравнение равновесия моментов входного звена в виде:
![]() ;
;
![]() [Н·м].
[Н·м].