

Министерство образования и науки РФ
Балаковский институт техники, технологии и управления (филиал)
ФГБОУ ВПО «Саратовский государственный технический
университет имени Гагарина Ю.А.»
Кафедра: Высшая математика и механика
Расчетно-пояснительная записка
к курсовому проекту по теории механизмов и машин на тему:
«Анализ и синтез механизмов
поперечно-строгального станка»
Выполнил:
студент гр. НТС-31
Иванов И.И.
Принял:
доц. Лебедев С.В.
Балаково 2013
Содержание
Задание на курсовой проект ………………………………………………………… 3
1. Кинематический и силовой анализ механизма …………………………………… 5
1.1. Структурный анализ рычажного механизма ……………………………… 5
1.2. Построение совмещенных планов положений механизма ……………….. 6
1.3. Кинематический анализ передаточного механизма ………………………. 7
1.4. Построение плана скоростей механизма. Определение линейных
скоростей точек и угловых скоростей звеньев механизма ……………………. 7
1.5. Построение плана ускорений механизма. Определение линейных
ускорений точек и угловых ускорений звеньев механизма …………………… 9
1.6. Построение кинематических диаграмм выходного звена ………………… 11
1.7. Силовой анализ механизма ………………………………………………… 11
2. Синтез зубчатой передачи ………………………………………………………….. 16
2.1. Выбор коэффициентов смещения зубчатых колес передачи …………….. 16
2.2. Определение типа зубчатой передачи ……………………………………… 16
2.3. Расчет геометрических размеров зубчатой передачи …………………….. 16
2.4. Построение плана зацепления зубчатых колес …………………………… 19
2.5. Определение коэффициентов удельного скольжения ……………………. 20
2.6. Определение коэффициента удельного давления ………………………… 20
3. Синтез кулачкового механизма ……………………………………………………. 21
3.1. Аналитическое исследование закона движение толкателя ………………. 21
3.2. Определение основных размеров кулачкового механизма ………………. 23
3.3. Построение профиля кулачка ………………………………………………. 23
Список использованной литературы …………………………………………………. 24
Задание на курсовой проект Рычажный механизм перемещения резца поперечно-строгального станка
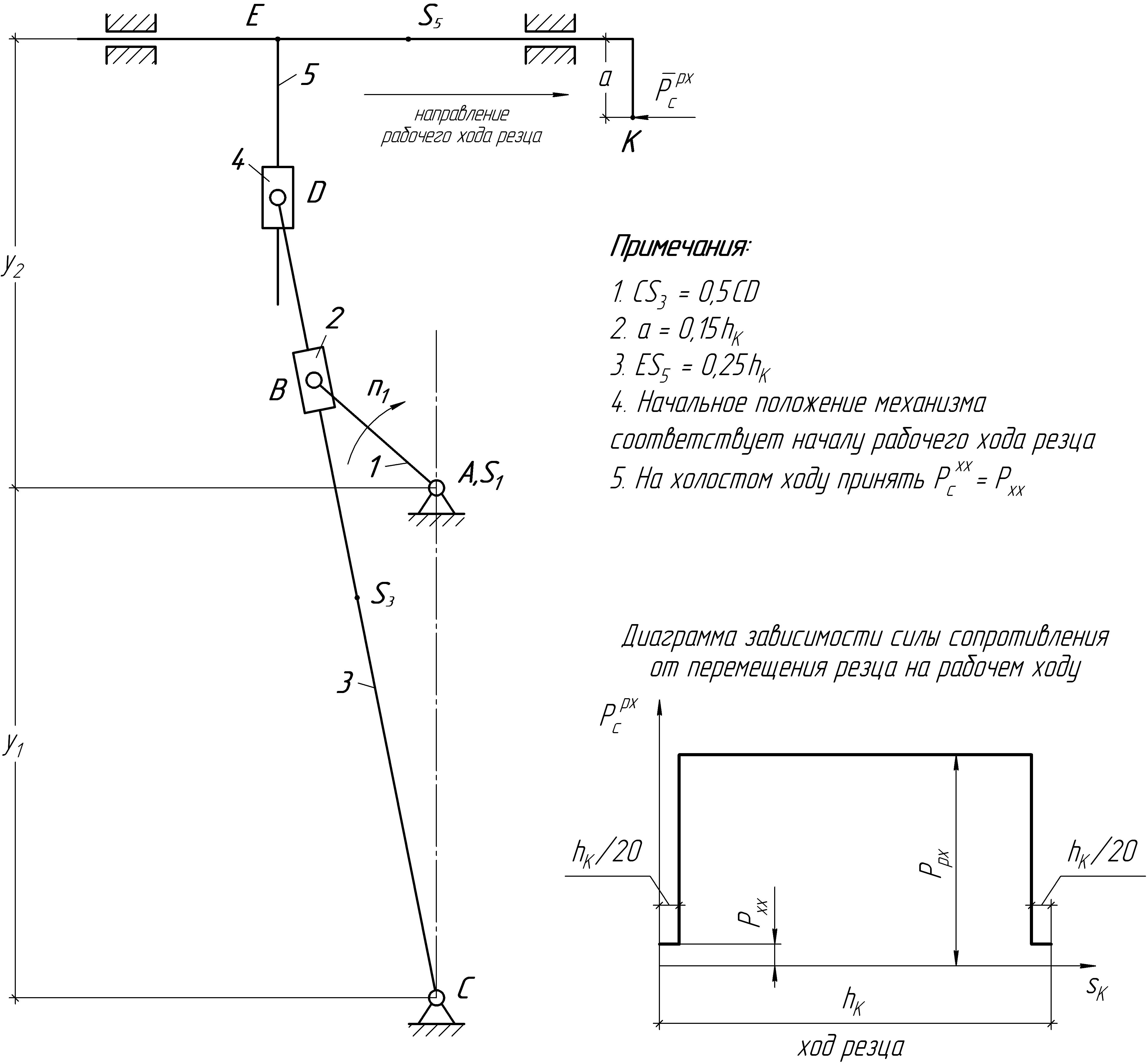
Основные размеры: lAB = 0,16 м; lCD = 0,8 м; y1 = 0,50 м; y2 = 0,44 м.
Массы звеньев: m1 = 20 кг; m3 = 62 кг; m5 = 72 кг.
Центральные моменты инерции звеньев: IS1 = 0,55 кг·м2; IS3 = 2,2 кг·м2.
Cила сопротивления резанию: Pрх = 6900 Н.
Cила сопротивления на холостом ходу: Pхх = 710 Н.
Расчетное положение: 2.
С
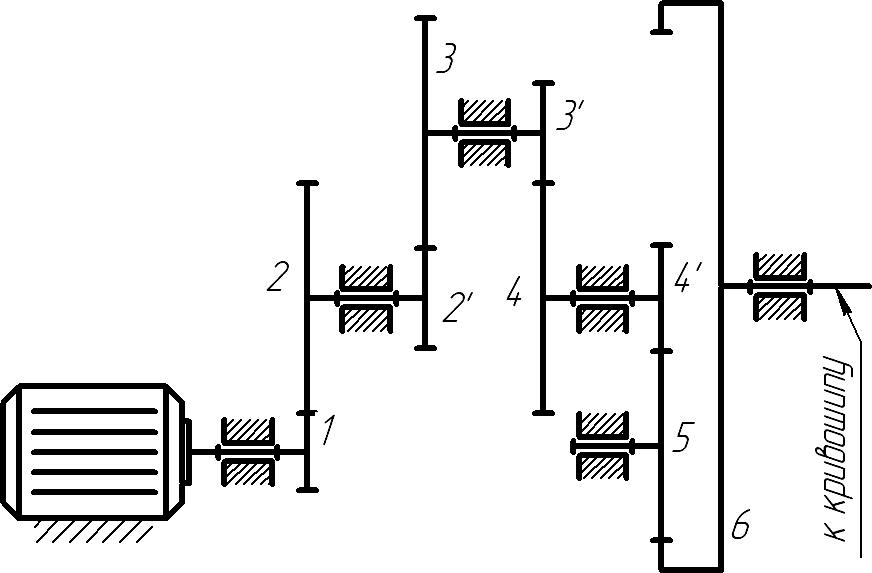
Скорость ротора
электродвигателя: nдв
= 2900 об/мин.
Числа
зубьев колес: z1
= 18; z2
= 34; z2'
= 26; z3
= 35; z3'
= 25; z4
= 51; z4'
= 18; z5
= 30; z6
= 85. Модули
колес: m1
= m2
= 2.25 мм; m2'
= m3
= 2.75 мм; m3'
= m4
= 3.5 мм; m4'
= m5
= m6
= 4.0 мм.
Спроектировать
зубчатую передачу, состоящую из колес
1–2.
Коэффициенты смещения x1
и x2
определить из условия получения передачи
с максимально возможным коэффициентом
перекрытия ε
= εmax.
Межосевое расстояние
передачи принимается свободно, округление
не требуется.
К улачковый механизм с плоским толкателем
Фазовый угол подъема: φ1 = 110°.
Фазовый угол верхнего стояния: φ2 = 45°.
Фазовый угол опускания: φ3 = 160°.
Фазовый угол нижнего стояния: φ4 = 45°.
Угол наклона тарели: γ = 80º.
Ход толкателя: smax = 24 мм.
Закон движения толкателя:


1. Кинематический и силовой анализ механизма
Цель работы: провести кинематический анализ рычажного механизма в перманентном движении методом планов и методом диаграмм; выполнить силовой анализ рычажного механизма методом кинетостатики.
1.1. Структурный анализ рычажного механизма.
Заданный рычажный
механизм содержит стойку и 5 подвижных
звеньев, образующих
7 низших кинематических пар
(![]() ).
).
Рассчитаем степень свободы механизма по формуле Чебышева:
![]() .
.
Число степеней свободы механизма равно числу входных звеньев, следовательно, механизм имеет работоспособную структуру.
Производим разложение механизма на структурные группы.
Сначала выделяем группу Ассура 4–5 (рис. 1 а).
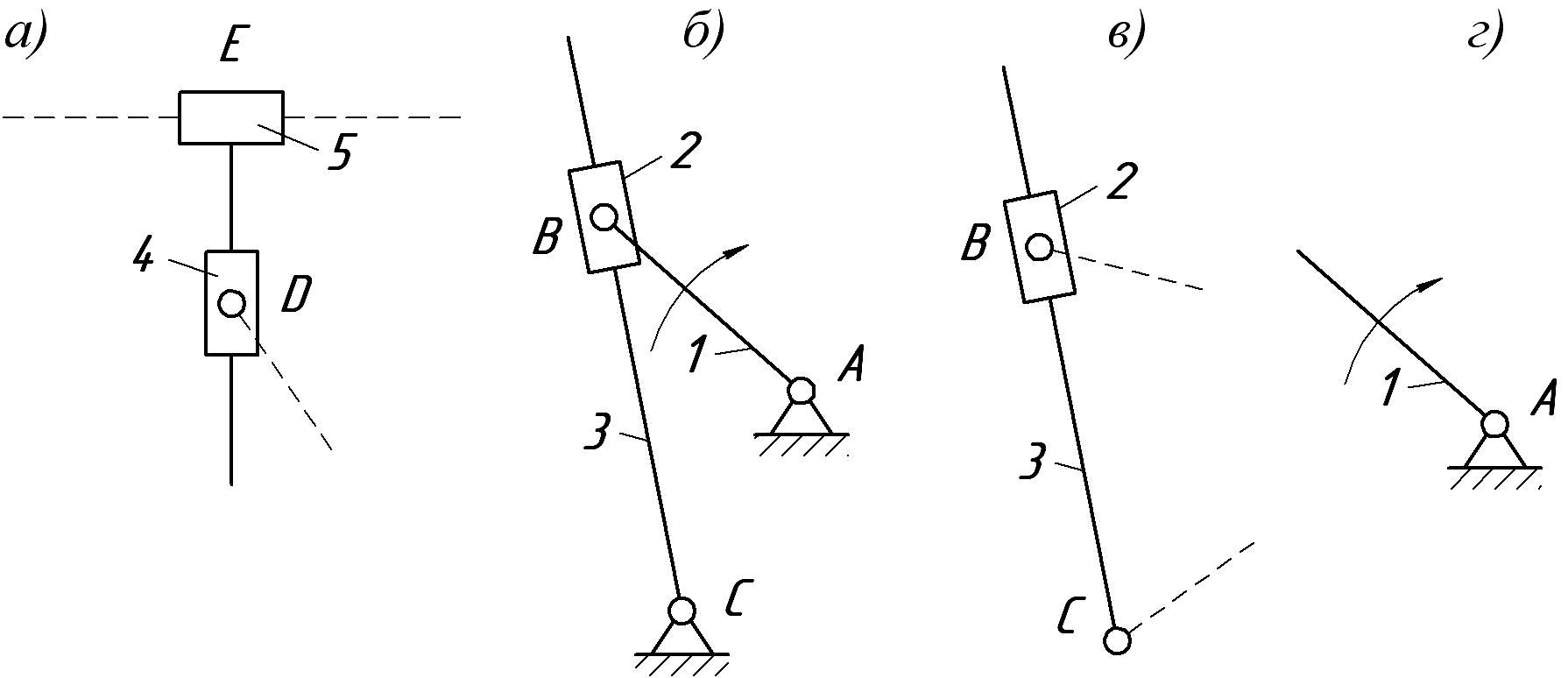
Рис. 1. Структурный анализ рычажного механизма
Проверим ее степень свободы:
![]() .
.
Группа состоит из двух звеньев и, следовательно, относится ко II классу, 2 порядку.
Оставшийся механизм показан на рис. 1 б. Проверяем его работоспособность:
![]() .
.
Выделяем группу Ассура 2–3 (рис. 1 в) и проверим ее степень свободы:
![]() .
.
Группа также состоит из двух звеньев и относится ко II классу, 2 порядку.
После выделения этой группы Ассура остается первичный механизм, относящийся к I классу (рис. 1 г).
Таким образом, заданный рычажный механизм состоит из первичного механизма I класса и двух последовательно присоединенных групп Ассура II класса.
Заданный рычажный механизм относится ко II классу.
Составим формулу строения механизма:
I (1) → II (2, 3) → II (4, 5).
1.2. Построение совмещенных планов положений механизма.
Для построения
планов положений механизма принимаем
масштабный коэффициент
![]() .
.
С учетом этого находим размеры звеньев механизма на чертеже:
![]() [мм];
[мм];
![]() [мм];
[мм];
![]() [мм];
[мм];
![]() [мм];
[мм];
![]() [мм].
[мм].
Сначала на чертежном листе строим планы крайних положений механизма, в которых выходное звено 5 имеет останов. Крайнее положение, предшествующее началу рабочего хода звена 5, принимаем за начальное (нулевое). От нулевого положения делим окружность движения точки B кривошипа на 12 равных частей и нумеруем положения точки B по ходу вращения кривошипа. Затем методом засечек строим в тонких линиях звенья механизма для каждого из 12-ти положений кривошипа. Обводим жирными линиями звенья механизма в расчетном положении (в данном случае во 2-ом положении), условно изображая все кинематические пары. Центры тяжести звеньев S1, S3, S5 обозначаем только в расчетном 2-ом положении. Траекторию движения центра тяжести S3 показываем пунктирной линией.
С чертежа определяем ход (максимальное перемещение) звена 5:
![]() [мм];
[мм];
![]() [м].
[м].
Вылет резца:
![]() [мм];
[мм];
![]() [м].
[м].
Расстояние от точки E звена 5 до центра тяжести S5:
![]() [мм];
[мм];
![]() [м].
[м].
Пользуясь разметкой
перемещения точки K,
строим диаграмму изменения силы
сопротивления
![]() для рабочего хода. По оси ординат
диаграммы принимаем масштабный
коэффициент
для рабочего хода. По оси ординат
диаграммы принимаем масштабный
коэффициент
![]() [Н/мм].
[Н/мм].
В процессе движения
механизма изменяется расстояние от
точки C
до точки B,
значение которого будет использовано
в дальнейших расчетах. Поэтому для
удобства сведем в таблицу 1.1 значения
переменной длины
![]() ,
измеренные с чертежа, переводя их в
натуральную величину
,
измеренные с чертежа, переводя их в
натуральную величину
![]() .
.
Таблица 1.1. Значения переменного расстояния CB
Положение |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
|
157,9 |
184,7 |
205,8 |
217,9 |
219,2 |
209,7 |
190,6 |
164,7 |
137,4 |
117,4 |
114,9 |
131,4 |
|
0,474 |
0,554 |
0,617 |
0,654 |
0,658 |
0,629 |
0,572 |
0,494 |
0,412 |
0,352 |
0,344 |
0,394 |