

4.Контур управления и его анализ
В общем случае система управления представляет собой замкнутый контур, который состоит из звеньев, отображающих связи между различными переменными величинами, характеризующими движение летательного аппарата.
В контур управления обязательно должны входить следующие схемы:
- Схема, соответствующая объекту управления;
- Схема, соответствующая различного рода радиоустройствам, которые существуют в системе.
В общем случае контур управления состоит из нескольких контуров. Принято различать внутренние и внешние контура. Внутренние контура – это контуры стабилизации, а внешние контуры определяют движение летательного аппарата по траектории.
Внешний контур радиоуправления имеет ряд особенностей:
- Обязательное наличие звена Автопилот-Снаряд (А-С). Входом этого звена является сигнал рассогласования U либо командный сигнал Uk.
- В контур должно входить радиозвено, которое определяет информационную связь между различными переменными, действующими в системе. Все радиотехнические устройства, с помощью которых измеряются координаты, передаются сигналы управления, объединяются в радиозвено. Выходным сигналом радиозвена является сигнал рассогласования.
- Кинематическое звено. Оно не связано с какой либо аппаратурой, а определяет соотношения между различными координатами и параметрами движения. Это звено указывает связь между выходом звена Автопилот-Снаряд и координатами, являющимися входом радиозвена.
Графическое изображение этих связей с помощью условных обозначений образует структурную схему контура управления (рис..).
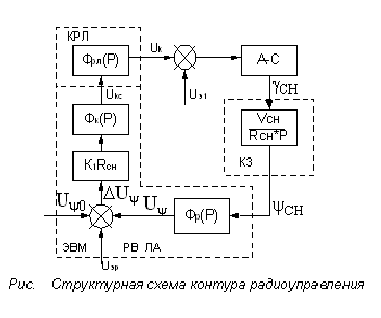
Поясним назначение и характеристики основных элементов схемы рис..
Командная радиолиния обеспечивает передачу командного сообщения Uкс, выработанного ЭВМ на вход звена А-С. В простейшем случае она может быть описана линейным радиозвеном с передаточной функцией ФРЛ(Р), а при достаточно широкой полосе пропускания – безынерционным звеном с коэффициентом передачи kрл. Малые помехи, действующие на радиолинию и пересчитанные на её вход изображены в виде эквивалентного напряжения Uэ1, которое суммируется с командным сигналом Uk. Передаточная функция радиолинии при действии малых помех не изменяется и остаётся такой же, как при воздействии только одного полезного сигнала.
Передаточная функция кинематического звена, связывающая YСН и СН, содержит интегрирующее звено и безынерционное звено с переменным коэффициентом усиления 1/RCН(t). Следовательно, кинематическое звено является не стационарным.
Ридиовизир снаряда будем считать выполненным в виде радиолокатора, автоматически следящего за угловыми координатами летательного аппарата. На его выходе формируется приборные аналоги углов U. Радиовизир летательного аппарата, который является системой автоматического регулирования, приближённо можно представить в виде эквивалентного колебательного или инерционного звена с передаточной функцией Фр(Р). Радиовизир измеряет углы не точно, а с некоторыми ошибками. Наличие этих ошибок учитывается в структурной схеме введением эквивалентного возмущающего сигнала Uэр, который суммируется с приборными аналогами углов.
ЭВМ вырабатывает сигнал углового отклонения летательного аппарата от заданной траектории U. Для компенсации нестационарности кинематического звена обычно производят умножение U на величину k1RСН, пропорциональную расстоянию пункт управления – летательный аппарат.
Для обеспечения нужного качества регулирования в контуре управления движением летательного аппарата с помощью корректирующего звена с передаточной функцией Фк(Р), в котором могут осуществляться различные линейные операции с сигналом рассогласования. На выходе ЭВМ формируется командное сообщение UКС, поступающее на вход радиолинии.