

ФБГОУВПО
«Московский государственный строительный университет»
кафедра «Механическое оборудование, детали машин и технология металлов»
Конспект лекции №11 по дисциплине
«Теория механизмов и машин»
для бакалавров по направлению 270800
Москва 2013-11-13
Режимы движения
Анализ движения ведут с использованием уравнения движения в той или иной форме. Воспользуемся уравнения движением в виде уравнения «живых сил»: изменение кинетической энергии равно разности работ сил движущих и сил сопротивления:
|
T=АдвАс |
(1.2) |
В соответствии с этим уравнением можно рассматривать три режима движения: разгон при ΔT>0; установившееся движение при ΔT=0; выбег или останов при ΔT<0.
На рис. показан график средней скорости движения механизма. На нем обозначено время движения при разгоне tр, при установившемся движении tу и при выбеге tв. Полное время движения механизма t равно сумме времен всех трех режимов.
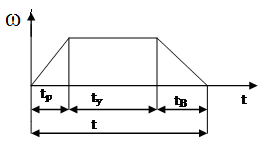
Рис. График движения механизма
16.3 Коэффициент неравномерности движения
16 |
Регулирование движения механизма. Неравномерность вращения ведущего звена механизма. Определение момента инерции маховика и его размеров. |
Мы рассматривали график (рис. ) режимов движения звена приведения в виде прямых линий. Реально всегда существуют колебания скорости вокруг какого-то среднего значения. Эти колебания скорости часто регламентируют и для их количественной оценки служит коэффициент неравномерности движения δ, равный отношению размаха скорости к ее среднему значению. Например, для звена приведения совершающего вращательное движение:
|
δ=(ωmax−ωmin)/ωср, |
(16.10) |
где ωmax и ωmin – максимальное и минимальное значения скорости; ωср - среднее значение скорости: ωср=(ωmax+ωmin)/2.

Рис.16.1 График скорости звена приведения
в установившемся режиме
Зная коэффициент неравномерности движения δ и среднюю скорость можно найти ее допустимые наибольшие и наименьшие значения:
|
ωmax=ωср(1+δ/2) и ωmin=ωср(1−δ/2). |
(16.11) |
Следует заметить, что обычно колебания скорости коэффициентом неравномерности движения δ оценивают при установившемся режиме движения.
Определение момента инерции маховика
Колебания скорости звена приведения при установившемся движении могут быть периодическими и непериодическими. В случае периодических колебаний регулирование скорости можно осуществить с помощью маховика.
Маховиком называется добавочная масса вращающегося звена, предназначенная для обеспечения требуемого коэффициента неравномерности движения. |
По форме маховик часто выполняют в виде массивного обода, соединенного со ступицей спицами или диском. Есть и другие формы маховика, например, в виде чечевицы, или так называемые супермаховики с навитым ободом из высокопрочной проволоки или композитных материалов. По сравнению с обычными маховиками, они могут аккумулировать больше энергии на единицу массы или обладают большей прочностью. Интересующиеся этой темой могут посмотреть работы российского ученого профессора Норберта Гулиа [ ].
Определим момент инерции маховика в первом приближении. Рассмотрим уравнение движения звена приведения на участке изменения его скорости вращения от ωmax до ωmin .

|
|
(16.12) |
где

 - приведенный момент инерции механизма
в тех его положениях, когда скорость
звена приведения принимает значения
соответственно ωmax
и ωmin;
Аизб
– избыточная работа:
- приведенный момент инерции механизма
в тех его положениях, когда скорость
звена приведения принимает значения
соответственно ωmax
и ωmin;
Аизб
– избыточная работа:

Пусть приведенный момент инерции механизма IП состоит из постоянной части приведенного момента инерции звеньев механизма I0 без момента инерции маховика IМ и переменной части приведенного момента инерции звеньев механизма I, величиной которой в первом приближении по сравнению с I0и IМ можно пренебречь. Тогда

и из (16.12) получаем

Заменим в этом выражении угловые скорости через коэффициент неравномерности движения и среднею скорость ωср по (16.11) и получим формулу определения момента инерции маховика, установленного на звене приведения:
|
|
(16.12) |
В формуле (16.12) неизвестна лишь избыточная работа Аизб. Она равна:

Из этой формулы следует, что избыточную работу можно найти как разность площадей под графиками моментов движущего и сопротивлений. На схеме (рис.16.2) заштрихованы три разные избыточные работы: две со знаком минус (АД<АС) и одна со знаком плюс (АД>АС). За цикл установившегося движения, для которого определяется значение момента инерции маховика, работа сил движущих должна быть равна работе сил сопротивления (АД=АС). Поэтому сумма площадей со знаком плюс должна быть равна сумме площадей со знаком минус, то есть, F2-F1-F3=0. Для каждой из избыточных площадей можно вычислить момент инерции маховика, но только для интервала угла поворота звена приведения с максимальной избыточной работой может быть найдено то значение момента инерции маховика, которое обеспечит требуемый коэффициент неравномерности движения.
С учетом масштабов построения графиков моментов движущего и сопротивления избыточная работа, подставляемая в формулу (16.12), будет равна

где
 - масштабы графика по осям ординат и
абсцисс соответственно.
- масштабы графика по осям ординат и
абсцисс соответственно.
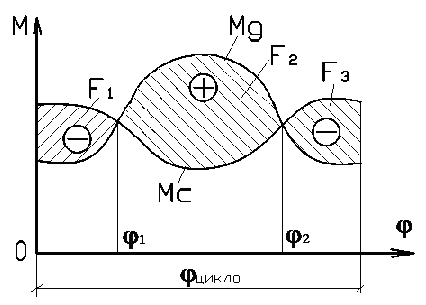
Рис.16.2 Схема к определению избыточной работы
Задача №291. Силы, приложенные к машинному агрегату, и его массы приведены к звену АВ. Движение агрегата установилось. Один цикл установившегося движения соответствует углу φц = 2π. Приведенный момент сил сопротивления Мс изменяется согласно графику, а приведенный момент движущих сил Мд постоянен на всем цикле установившегося движения. Приведенный момент инерции масс звеньев машинного агрегата постоянен и равен Iп = 0,2 кгм2. Средняя угловая скорость звена АВ равна ωср = 30 сек-1.
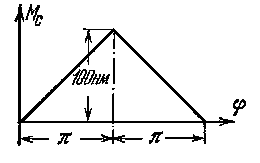
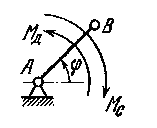
Определить, какой должна быть величина момента инерции маховика, устанавливаемого на валу А звена АВ, чтобы коэффициент неравномерности движения δ был равен 0,08.
План решения задачи №291.
1. Из сравнительного анализа исходных данных и формулы определения момента инерции маховика определяются искомые параметры.
2. Из условия установившегося движения определяется значение движущего момента.
3. По графику движущего момента и момента сопротивлений находится максимальная избыточная работа.
4. Определяется (вычисляется) момент инерции маховика.
