

38) Схема пуска ад с фр
Типовая схема пуска АД с фазным ротором в функции времени и механические характеристики представлены на рисунке 2.5.
Рисунок 2.5
|
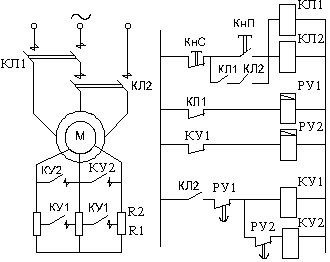

Особенность схемы: используется аппаратура схемы управления напостоянном токе, что применяется в ответственных системах ЭП, либо при большой частоте включений в час (1000 вкл/час). Для подключения трехфазной сети используются два линейных контактора, у которых только по два главных (силовых) контакта.
39.
хемы управления двигателями в функции времени |
|
|
Э Управление в функции времени получило наибольшее распространение в промышленности из-за простоты и надежности серийно выпускаемыхэлектромагнитных и электронных реле времени. Так, из рис. 1, а и б видно, что замыканием контакта К линейного контактора в цепь якоря включается все сопротивление реостата, равное R1 + R2 + R3, а включение секций пускового сопротивления может происходить через определенные интервалы времени t1, t2 и t3 при определенных частотах вращения двигателя n1, n2, n3 и при снижении пускового тока до заданного значения I2. Интервалы времени подбираются так, чтобы при каждом очередном закорачивании сопротивления ток двигателя не превышал бы допустимого I1. При разгоне двигателя от n= 0 до n1 ток убывает до I2 в результате роста противоэлектродвижущей силы. Через промежуток времени t1 замыкается контакт К1, шунтирующий сопротивление R1, что вызывает уменьшение сопротивления реостата до R2+R3, новое увеличение тока до I1 и т. д. По окончании пуска двигатель разгоняется до номинальной частоты вращения, пусковой реостат полностью выведен.
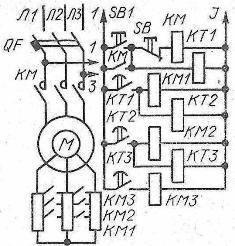
Рис. 1. Схемы управления двигателями в функции времени: а — пускового реостата двигателя постоянного тока, б — пусковая диаграмма Рассмотрим некоторые схемы управления двигателя в функции времени. При управлении асинхронным двигателем с фазным ротором в функции времени (рис. 2) выдержка времени, необходимая для закорачивания отдельных ступеней пускового реостата, обеспечивается маятниковыми реле времени, число которых равно числу ступеней. Работа схемы осуществляется следующим образом.
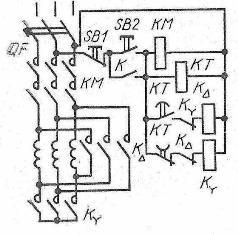
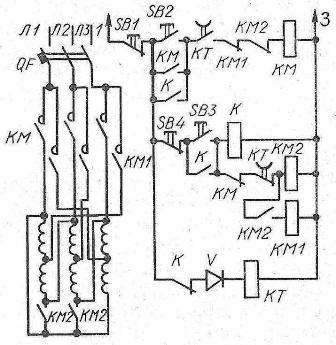
Рис. 2. Схема управления в функции времени асинхронного двигателя с фазным ротором При нажатии на кнопку SB1 получает электропитание катушка линейного контактора КМ, включающего статор двигателя в сеть. Пусковой реостат при этом введен полностью. Вместе с контактором включается реле времени КТ1, которое через заданный интервал времени замыкает контакт в цепи катушки контактора КМ1. Контактор срабатывает и замыкает первую секцию пускового реостата ротора. При этом включается реле времени КТ2, которое замыкает с замедлением свои контакты и включает катушку КМ2 и реле времени КТЗ. Контакты контактора КМ2 закорачивают вторую ступень КМ2 пускового реостата. Далее с замедлением времени срабатывает контакт реле КТЗ, включающий катушку КМЗ, которая закорачивает последнюю ступень пускового реостата КМЗ, и двигатель продолжает работать в дальнейшем как с короткозамкнутым ротором. Останов двигателя производят кнопкой SB, а при перегрузках двигатель отключается расцепителями автоматического вводного выключателя QF. При этом отключается линейный контактор, его блок-контакт КМ и все контакторы ускорения и реле времени без выдержки времени. Схема готова к следующему пуску. Для пуска вхолостую асинхронного двигателя повышенной мощности с переключением обмотки статора со звезды на треугольник можно использовать схему рис. 3. Переключение в этой схеме выполняется автоматически в функции времени. Нажатием кнопки SB2 обмотку статора включают в сеть контактором КМ. Одновременно подключаются к сети реле времени КТ и катушка KY, соединяющего обмотку статора звездой при помощи трех замыкающих контактов в силовой цепи.
Рис. 3. Схема управления в функции времени асинхронного двигателя переключением со Y на Δ Двигатель включается и разгоняется при пониженном напряжении. Через заданный промежуток времени реле КТ выключает контактор KY и включает катушку контактора КΔ соединяющего обмотку статора треугольником. Так как в цепи катушки КΔ находится блок-контакт KY, включение контактора КΔ не может произойти раньше выключения контактора KMY. Ступенчатый пуск многоскоростных асинхронных двигателей является более экономичным и выполняется в функции времени. Рассмотрим пример ступенчатого пуска двухскоростного однообмоточного двигателя (рис. 4). Обмотка статора переключается с треугольника на двойную звезду с удвоением частоты вращения.
Рис. 4. Схема управления в функции времени ступенчатого пуска асинхронного двигателя Контактором КМ двигатель включается на первую ступень частоты вращения, а контакторами КМ2 и КМ1 на вторую. Для включения двигателя на первую частоту вращения нажатием кнопки SB2 включается катушка контактора КМ и его силовые контакты КМ в главной цепи. Обмотка статора, соединенная треугольником, включается в сеть. Катушка реле времени КТ находится под напряжением, а ее замыкающий контакт (в цепи катушки КМ) замкнут.
С Блок-контакт КМ в цепи катушек КМ2 и КМ1 размыкается. Эти катушки отключены также размыкающим контактом КТ, который срабатывает с замедлением при возврате. Через заданный промежуток времени замыкающий контакт КТ отключит катушку КМ, а его размыкающий контакт включит катушки контакторов второй частоты вращения КМ1 и КМ2. Их главные контакты в силовой цепи переключат обмотку статора на двойную звезду и включат ее в сеть. Следовательно, двигатель сначала разгоняется до первой частоты вращения, а затем автоматически переключается на вторую частоту вращения. Отметим, что предварительное соединение обмотки статора на двойную звезду и последующее включение ее в сеть выполняется сначала включением двух замыкающих силовых контактов КМ2, а затем трех замыкающих главных контактов КМ1. Такая последовательность включения достигается тем, что катушка КМ1 включается на напряжение через замыкающий блок-контакт КМ2. Останов двигателя выполняется нажатием кнопки «Стоп», обозначенной на схеме буквой SB1. На рис. 5 изображена схема автоматического пуска двигателя постоянного тока параллельного возбуждения в функции времени. Включением автоматического выключателя QF двигатель подготавливается к пуску. Ток течет по цепи, состоящей из катушки реле времени КТ1, якоря двигателя М и двух ступеней пускового реостата R1 + R2.
Рис. 5. Схема управления в функции времени двигателя постоянного тока параллельного возбуждения Вследствие большого сопротивления катушки реле КТ1 ток в этой цепи весьма мал и никакого действия на двигатель не оказывает, но само реле срабатывает и его размыкающий контакт в цепи контактора КМ1 размыкается. В обмотку второго реле времени КТ2, включенную параллельно сопротивлению R1, ответвляется столь малый ток, что включиться оно не может. Обмотка возбуждения LM двигателя также оказывается включенной. Пуск двигателя выполняется нажатием кнопки SB2. Включаются при этом контактор КМ и его контакт в цепи якоря двигателя. Большой пусковой ток ограничивается двумя ступенями реостата R1 и R2. Часть этого тока ответвляется в катушку реле КТ2, и оно, срабатывая, размыкает свой контакт КТ2 в цепи контактора КМ2. Одновременно с замыканием цепи якоря М рабочий контакт контактора КМ закорачивает катушку реле КТ1. После установленного промежутка времени при возврате реле КТ1 замкнет свой контакт КТ1 в цепи контактора КМ1. Этот контактор своим рабочим контактом KM1 закоротит первую ступень R1 пускового реостата и обмотку реле времени КТ2. С замедлением при возврате его рабочие контакты КТ2 включат контактор КМ2, который своими рабочими контактами КМ2 закоротит вторую ступень R2 пускового реостата. На этом пуск двигателя заканчивается. При нажатии на кнопку SB1 контактор КМ обесточится и отключит свой главный контакт в цепи якоря. Якорь остается под напряжением, но оказывается включен последовательно с обмоткой реле КТ1, благодаря чему через него проходит незначительный ток. Реле КТ1 сработает, разомкнет свой контакт в цепи контакторов КМ1 и КМ2, они отключатся и разомкнут свои контакты, закорачивающие сопротивления R1 и R2. Произойдет останов двигателя, но его обмотка возбуждения остается подключенной к сети и двигатель тем самым подготовлен для следующего пуска. Полное отключение двигателя выполняют выключением автоматического вводного выключателя ВВ. Динамическое торможение двигателей также выполняется в функции времени. Для динамического торможения, например асинхронного двигателя, обмотка статора отключается от сети переменного тока и по одной из схем, показанных в табл.1, подключается к источнику постоянного тока. В лесной и деревообрабатывающей промышленности постоянный ток получают от специальных полупроводниковых выпрямителей. В этом случае отпадает необходимость в специальном источнике постоянного тока. При включении обмотки статора по одной из схем (см. табл. 1) к выпрямителю в обмотке создается неподвижное в пространстве магнитное поле. В неподвижном поле по инерции продолжает вращаться ротор двигателя. В роторе двигателя при этом будут создаваться переменная ЭДС и ток, который будет возбуждать переменное магнитное поле. Переменное магнитное поле ротора при взаимодействии с неподвижным полем статора создает тормозной момент. При этом запасенная кинетическая энергия ротором и исполнительным механизмом превращается в цепи ротора в электрическую энергию, а последняя — в тепловую. Тепловая энергия рассеивается из цепи ротора в окружающую среду. Выделение тепла в роторе будет нагревать двигатель. Количество выделенного тепла зависит от тока в обмотке статора при питании ее постоянным током. В зависимости от принятой схемы включения обмотки статора при питании ее постоянным током отношение тока к фазному току статора будет различным. Соотношения этих токов для различных схем включения показаны в табл. 1
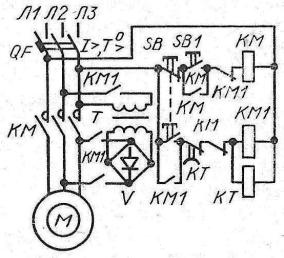
Схема динамического торможения асинхронного двигателя показана на рис. 6.
Рис. 6. Схема динамического торможения асинхронного двигателя. Нажатием на пусковую кнопку SB1 линейный контактор КМ включает двигатель в сеть переменного тока, его замыкающий блок-контакт переводит катушку КМ на самопитание. Размыкающий контакт КМ отключает при этом цепь питания контактора торможения КМ1 и реле времени КТ. При нажатии кнопки SB отключается линейный контактор КМ, а цепь катушки контактора КМ1 получит при этом электропитание. Контактор КМ1 включает свои контакты КМ1 в цепи трансформатора Т и выпрямителя V, в результате чего обмотка статора будет питаться постоянным током. Чтобы не произошло произвольного самовключения линейного контактора, последовательно с его катушкой КМ включен размыкающий блок-контакт КМ1. Одновременно с тормозным контактором включается реле времени КТ, которое настроено так, что его размыкающий контакт КТ отключит через заданный интервал времени катушку КМ1 и реле времени. Уставка реле времени КТ подбирается так, чтобы время срабатывания реле tкт равнялось сумме времени торможения двигателя tT и собственного времени отключения контактора КМ1. |
 тот
вид управления применяется тогда,
когда все переключения в схеме
электродвигателя осуществляют в
определенные моменты времени, например
при автоматизации процесса пуска
электродвигателей без контроля частоты
вращения или тока. Длительность
интервалов обусловлена и может
регулироваться уставками реле времени.
тот
вид управления применяется тогда,
когда все переключения в схеме
электродвигателя осуществляют в
определенные моменты времени, например
при автоматизации процесса пуска
электродвигателей без контроля частоты
вращения или тока. Длительность
интервалов обусловлена и может
регулироваться уставками реле времени.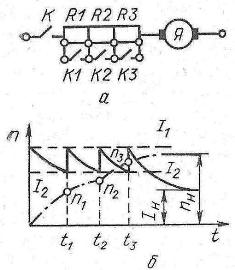
 тупенчатый
пуск двигателя на вторую частоту
вращения выполняется при помощи
промежуточного реле К, цепь которого
замыкается пусковой кнопкой SB3.
Замыкающие контакты К шунтируют обе
пусковые кнопки, а размыкающий контакт
К отключает реле времени КТ. Замыкающий
контакт КТ в цепи катушки КМ отключается
с замедлением при возврате, поэтому
катушка КМ в первый период пуска
оказывается замкнутой, а двигатель
включается на первую частоту вращения.
тупенчатый
пуск двигателя на вторую частоту
вращения выполняется при помощи
промежуточного реле К, цепь которого
замыкается пусковой кнопкой SB3.
Замыкающие контакты К шунтируют обе
пусковые кнопки, а размыкающий контакт
К отключает реле времени КТ. Замыкающий
контакт КТ в цепи катушки КМ отключается
с замедлением при возврате, поэтому
катушка КМ в первый период пуска
оказывается замкнутой, а двигатель
включается на первую частоту вращения.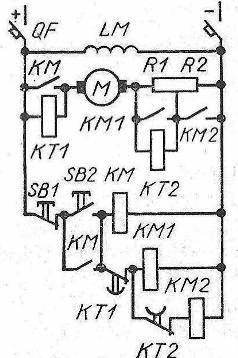

42. В последнее время электроизмерительная техника получает все более широкое распространение. Благодаря ряду существенных преимуществ электрических методов измерений, таких, как точность, чувствительность, возможность измерения на расстоянии и т. д., быстро развиваются косвенные методы измерения неэлектрических величин. Суть косвенных измерений в том, что измеряемая неэлектрическая величина при помощи специального устройства (датчика) преобразуется в пропорциональную ей электрическую величину, которая и измеряется. Таким способом могут измеряться различные механические величины (перемещения, скорость, частота колебаний), физические (температура, давление, влажность), химические (концентрация вещества, химический состав вещества и т. д.) и величины, связанные с процессами, происходящими в растениях и в организме животных или человека. Автоматическое управление и регулирование, бурно развивающиеся в последнее время, также требуют устройств, преобразующих контролируемые неэлектрические величины в электрические, так как их удобно анализировать, хранить и использовать для управления различными технологическими процессами. Такими устройствами являются специальные преобразователи — датчики. Важнейшей характеристикой любого датчика является его чувствительность S, определяемая как отношение приращения выходной величины к приращению входной.
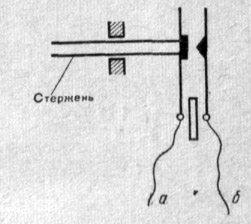
Реостатные датчики. Реостатный датчик представляет собой переменное сопротивление, подвижный контакт которого перемещается вместе с перемещением контролируемого объекта. В результате пропорционально измеряемому перемещению изменяется сопротивление между точками а и б.

Проволочные датчики. Проволочная спираль (например, из константана или нихрома) наклеена на поверхность детали, растяжение или сжатие которой измеряется. При рас тяжении (или сжатии) испытываемого образца растягивается (или сжимается) проволочная спираль, в результате чего омическое сопротивление изменяется за счет изменения длины, сечения и удельного сопротивления проволоки.

Датчики контактного сопротивления. Работа датчиков контактного сопротивления основана на зависимости величины сопротивления между поверхностями двух твердых тел от давления одного тела на другое. Чем больше давление, тем меньше контактное сопротивление, и наоборот.

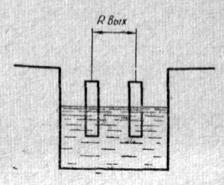
При сжатии контакта двух пластин из электродного угля сопротивление между точками а и б будет уменьшаться. Для увеличения чувствительности датчика используют не две, а больше угольных пластин Термосопротивления. Работа датчика этого типа основана на изменении сопротивления проводника при изменении его температуры В качестве термосопротивления используются в основном металлы со сравнительно большим положительным температурным коэффициентом сопротивления (платина, никель, медь). В последние годы появились и полупроводниковые термосопротивления, которые имеют более высокий температурный коэффициент. В отличие от механических термосопротивлений полупроводниковые имеют отрицательный температурный коэффициент. Электролитические датчики. В основе работы электролитического датчика лежит следующее явление: сопротивление между двумя пластинами, опущенными в электролит, зависит от концентрации электролита.
Контактные датчики. Контактные датчики используются для регистрации определенных положений предметов при их механических перемещениях. Например, при достижении стержнем определенного положения контакты а и б замыкаются, что регистрируется каким-либо электрическим прибором (устройством).
Индуктивные датчики. Работа индуктивных датчиков основана на свойстве катушки индуктивности изменять свое сопротивление при введении в нее ферромагнитного сердечника или при измене-чи величины зазора в магнитном сердечнике, на сотором помещена катушка.
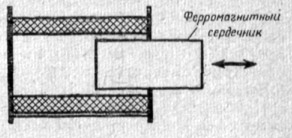
Индуктивные датчики применяются в основном для преобразования различных механических перемещений, для контроля размеров изделий и т.д.

Емкостные датчики, В работе емкостного датчика используется зависимость емкости конденсатора от трех параметров: площади обкладок, расстояния между ними и диэлектрическом постоянной среды между об кладками. В зависимости от того, на какой из параметров конденсатора воздействует измеряемая величина,
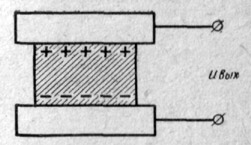
различают три типа: 1) с изменяющимся расстоянием между обкладками, 2) с изменяющейся площадью обкладок, 3) с изменяющейся диэлектрической постоянной. Чувствительность емкостных датчиков очень велика; она превосходит чувствительность всех других видов датчиков. Емкостные датчики используются для преобразования механических перемещений, состава смесей, измерений уровня жидкости и т. д. Термоэлектрические датчики (термопары). Работа термоэлектрического датчика основана на явлении термоэлектрического эффекта, который заключается в том, что если два проводника из различных материалов соединить одними концами и место их соединения нагреть, то на свободных концах проводников появится э. д. с. Величина этой э. д. с. зависит от материалов, из которых изготовлены эти проводники, и от разности температур между свободными и соединен ными концами.
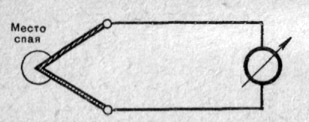
Наиболее распространенными материалами (и сила вами) для термопар являются следующие: платина, хромель, алюмель, копель, вольфрам, молибден. Пьезоэлектрические датчики. Принцип действия пьезоэлектрических датчиков основан на эффекте появления зарядов на гранях кристалла при его механической деформации. Величина возникающих зарядов пропорциональна величине упругих сил и не зависит от размеров поверхности нагруженного кристалла. Фотоэлектрические датчики. Под фотоэлектрическим датчиком (фотоэлементом) понимается устройство, которое изменяет свои параметры при воздействии на него световой энергии.

Радиационные датчики. В радиационных датчиках используется влияние измеряемой величины на интенсивность радиоактивного излучения гаммалучей. Каждый датчик состоит из радиоактивного источника и приемника радиоактивных излучений. На рисунке изображен сигнализатор уровня жидкости в среде. Здесь мы видим источник радиоактивных излучений 1, защитный экран 2, приемник радиоактивных излучений 3 и измерительный прибор 4. В том случае, когда уровень жидкости в сосуде ниже линии аб, интенсивность радиоактивного потока, проходящего через приемник 3, значительно больше, чем интенсивность потока в том случае, когда уровень жидкости выше уровня линии аб. При наполнении сосуда жидкостью в момент, когда ее уровень поднимается выше линии аб, интенсивность потока через приемник радиоактивных излучений резко уменьшается.