

1)Показатели регулирования скорости электроприводов |
|
|
Р При параметрическом способе регулирование достигается изменением каких-либо параметров электрических цепей двигателей или питающего напряжения за счет включения, например, различных дополнительных элементов: резисторов, конденсаторов, индуктивностей. Качество такого регулирования скорости обычно оказывается не очень высоким. При необходимости получения процесса регулирования скорости с высокими качественными показателями переходят к замкнутым системам электропривода, в которых воздействие на двигатель обычно осуществляется изменением подводимого к двигателю напряжения, или частоты этого напряжения, или того и другого. Для этой цели служат различные силовые преобразователи постоянного и переменного тока. Регулирование скорости в количественном отношении характеризуется шестью основными показателями.
1 Различные рабочие машины требуют разных диапазонов регулирования. Так, прокатные станы характеризуются диапазоном Д = 20 - 50, станки от Д = 3 - 4 до Д = 50 - 1000 и более, бумагоделательные машины Д = 20 и т.д. 2. Направление регулирования скорости определяется расположением получаемых искусственных характеристик относительно естественной. Если они располагаются выше естественной, то говорят о регулировании скорости вверх от основной, если ниже – вниз от основной. Расположение искусственных характеристик как выше, так и ниже естественной обеспечивает так называемое двухзонное регулирование. 3. Плавность регулирования скорости определяется числом получаемых в данном диапазоне искусственных характеристик: чем их больше, тем регулирование скорости будет осуществляться плавнее. Плавность оценивается коэффициентом, который находится как отношение скоростей на двух ближайших характеристиках kпл = ωi - ωi-1, где ωi иωi-1 – скорости на i-й и (i-1) искусственных характеристиках. Наибольшая плавность достигается в замкнутых системах с использованием преобразователей напряжения и частоты, небольшая плавность обычно соответствует параметрическим способам регулирования. При плавном регулировании скорости качественно протекает технологический процесс, улучшается качество выпускаемой продукции, повышается производительность работы электропривода и т.д. 4. Стабильность в поддержании заданной регулировочной скорости технологом зависит от жесткости механической характеристики электродвигателя. Более жесткую механическую характеристику возможно получить только в замкнутых электроприводах. В разомкнутом электроприводе и при слишком пониженной скорости и колебаниях момента сопротивления будут происходить большие колебания скорости, что недопустимо. 5. Допустимая нагрузка на двигатель при регулировании скорости зависит от протекающего тока в силовой части. Этот ток не должен превышать номинального значения. В противном случае двигатель будет перегреваться. Допустимый ток зависит от вида механической характеристики исполнительного органа и примененного способа регулирования скорости. 6. Экономичность регулирования определяется капитальными и эксплуатационными затратами на регулируемый электропривод. Капитальные затраты должны быть по возможности минимальными, или в противном случае такими, чтобы срок окупаемости электропривода не превысил нормативного. При расчете показателя экономичности регулирования скорости учитываются количество регулируемых скоростей в диапазоне регулирования, активные мощности на валу двигателя при различных скоростях, потери мощности при различных скоростях, время работы электродвигателя на каждой регулируемой скорости, активные и реактивные мощности, потребляемые электродвигателем. |
 егулированием
скорости является
принудительное изменение скорости
двигателя в целях регулирования
скорости движения исполнительных
органов машин и механизмов. В общем
случае регулирование
скорости двигателей –
а под этим понимается также и поддержание
скорости на заданном уровне –может
осуществляться двумя способами –
параметрическим и в замкнутых системах.
егулированием
скорости является
принудительное изменение скорости
двигателя в целях регулирования
скорости движения исполнительных
органов машин и механизмов. В общем
случае регулирование
скорости двигателей –
а под этим понимается также и поддержание
скорости на заданном уровне –может
осуществляться двумя способами –
параметрическим и в замкнутых системах. . Диапазон
регулирования определяется
отношением максимальной ωмахи
минимальной скоростей ωмин: Д = ωмах
/ ωмин при заданных пределах изменения
нагрузки на валу двигателя.
. Диапазон
регулирования определяется
отношением максимальной ωмахи
минимальной скоростей ωмин: Д = ωмах
/ ωмин при заданных пределах изменения
нагрузки на валу двигателя.2) 2.1 Электропривод с двигателем постоянного тока с независимым возбуждением.
2.1.1 Теоретические сведения.
Двигатели постоянного тока (ДПТ) широко применяются в промышленных, транспортных и других установках, где необходимо плавное регулирование скорости вращения (прокатные станы, металлорежущие станки, электрическая тяга на транспорте и. т. п.). В зависимости от способа электромагнитного возбуждения ДПТ подразделяют на ДПТ с независимым, последовательным и смешанным возбуждением. Иногда встречается название ДПТ с параллельным возбуждением, но необходимо учесть, что такой ДПТ является частным случаем ДПТ с НВ и этот термин применяется как доопределяющий.
Схема включения ДПТ с независимым возбуждением (ДПТ с НВ) приведена на рис. 2.1. Для ДПТ с НВ справедлива система уравнений, описывающая его статическое состояние:
U=IR+E
Е=с![]() ;
(2.1)
;
(2.1)
М=сI ;
где U - напряжение на якорной цепи, В ; R - суммарная сопротивление якорной цепи, Ом; М - электромагнитный момент, Нм; I -ток якоря, А; - угловая скорость двигателя, рад/с; Е - ЭДС вращения якоря, В; с = кФ - коэффициент пропорциональности, Вс; к = pN/2na - постоянная ДПТ (р - число пар полюсов; N - число активных проводников якорной обмотки; а - число пар параллельных ветвей якорной обмотки) Ф - магнитный поток, Вб.
Решая первые два уравнения в системе (2.1) относительно Е, можно получить известное уравнение электромеханической характеристики ДПТ
![]() ,
(2.2)
,
(2.2)
которое определяет зависимость = f(I).
С учетом третьего уравнения в (2.1) уравнение (2.2) можно переписать в виде зависимости w=f(M) которая определяет механическую характеристику ДПТ:
![]() ,
(2.3)
,
(2.3)
или
![]() (2.4)
(2.4)

Рис. 2.1. Схема включения ДПТ с НВ
которое определяет зависимость = f(I).
Данное уравнение механической характеристики определяет зависимость скорости вращения от момента на валу двигателя, т.к. в статике вращающий момент равен моменту сопротивления Мс на валу ДПТ, то это уравнение определяет зависимость от Мс, прикладываемого к валу.
Стоит сказать, что здесь мы оперируем величиной электромагнитного момента М, который превышает выходной момент на валу на величину, соответствующую потерям в стали и механическим потерям от трения, но в большинстве практических расчетов можно считать, что эти моменты равны. Коэффициент пропорциональности с = кФ можно считать постоянным для тех ДПТ с НВ, у которых имеются компенсационные обмотки или в случае, когда можно пренебречь влиянием реакции якоря на величину Ф. Вообще-то влияние поперечной реакции якоря на Ф ведет к нарушению линейности механической характеристики по мере увеличения тока.
Из анализа уравнения электромеханической характеристики (формула 2.2) видно, что она может быть представлена прямой линией (рис. 2.2) при неизменных напряжении U, магнитном потоке Ф, создаваемом ОВ и сопротивлением якорной цепи R. Если U = Uном, Ф = Фном и Rд = 0, электромеханическая характеристика называется естественной. При изменении хотя бы одного из указанных параметров электромеханическая характеристика называется искусственной. Таким образом, можно отметить, что ДПТ с НВ обладает лишь одной естественной характеристикой и множеством искусственных.
Нетрудно видеть,
что в случае, если I=0, имеет
место режим идеального холостого хода
и при этом
![]() =
=![]() = U/кФ == U/c
, т.е.
= U/кФ == U/c
, т.е.
![]() и
и
![]() .
.
27. Частотные преобразователи применяются для регулирования скорости вращения асинхронных электродвигателей благодаря изменению частоты напряжения питания электродвигателя.Применение частотно-регулируемого привода позволяет осуществлять регулирование скорости в широком диапазоне, как в процессе работы, так и при разгоне и торможении.Преобразователь частоты также осуществляет защиту электродвигателя от перегрузок, что увеличивает срок службы электрической и механической части оборудования.Экономически обосновано, что применение частотного преобразователя в различных механизмах позволяет достичь до 60% энергосбережения.
Электромашинные преобразователи служат для преобразования энергии одного вида в другой (частоты, напряжения, числа фаз и т.д). могут выполняться одноякорными и двухякорными. Двухякорный преобразователь простейший можно выполнить из двух отдельных машин соединенных механически, но не электрически. Могут быть представлены в виде генератора и двигателя но существуют промышленные образцы в виде системы генератор - двигатель расположенных в одном корпусе с двумя роторами расположенных на одном валу и с магнитными системами статора отдельными в общем корпусе. Такие преобразователи применяются для преобразования переменного тока в постоянный. АД и постоянный генератор. Этот преобразователь может служить и для преобразования постоянного тока в переменный с регулируемой частотой. Недостатки: Основной - низкий КПД т.к. результирующий КПД равен произведению КПД машин.
28 Полупроводниковые преобразователи частоты служат для преобразования трехфазного тока промышленной частоты (50-60Гц) в однофазный ток повышенной частоты. Производимые НПП "Курай" Полупроводниковые Преобразователи Частоты (ППЧ) предназначены для питания индукционных установок в следующих, связанных с нагревом металлов и токопроводящих материалов, технологических процессах:
Термообработка: закалка, отпуск, отжиг, правка, старение, предварительный нагрев перед сваркой, и др.;
Нагрев деталей порошковой металлургии;
Пайка высокотемпературным припоем;
Формоизменение: ковка, гибка, прошивка, прессование;
Плавка;
Преобразователи может работать в следующих режимах:
Непосредственное частотное управление мощностью;
Стабилизация выходного напряжения;
Поддержание максимально возможной выходной мощности.
29)
Импульсное регулирование скорости
(рис.1) производится путем периодического
включения двигателя в сеть и отключения
его от сети или путем периодического
шунтирования с помощью контактора Ксопротивлений,
включенных последовательно в цепь
статора, или полупроводниковых
вентилей.
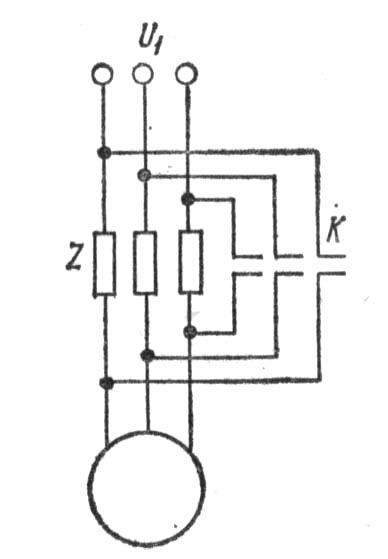 Рис.
1.
При
этом двигатель беспрерывно находится
в переходном режиме ускорения или
замедления скорости вращения ротора
и в зависимости от частоты и продолжительности
импульсов работает с некоторой,
приблизительно постоянной скоростью
вращения. Подобное регулирование
скорости применяется только для
двигателей весьма малой мощности (рн <
30 - 50 вт).
Регулирование
скорости вращения асинхронных двигателей
с фазным ротором
Для
двигателей с фазным ротором можно в
принципе использовать все те же
способы регулирования скорости вращения,
как и для двигателей с короткозамкнутым
ротором. Однако на практике из числа
этих способов для двигателей с фазным
ротором применяется только способ
регулирования скорости вращения с
помощью реакторов насыщения. Ниже
рассмотрим способы регулирования
скорости вращения, которые специфичны
для двигателей с фазным ротором и в
которых используется возможность
включения регулирующих устройств
во вторичную цепь.
Регулирование
скорости вращения с помощью реостата
в цепи ротора
Регулирование
скорости вращения с помощью реостата
в цепи ротора производится по той же
схеме, что и реостатный пуск двигателя,
но реостат при этом должен быть рассчитан
на длительную работу. При увеличении
активного сопротивления вторичной
цепи вид механической характеристики
двигателя изменяется
Рис.
1.
При
этом двигатель беспрерывно находится
в переходном режиме ускорения или
замедления скорости вращения ротора
и в зависимости от частоты и продолжительности
импульсов работает с некоторой,
приблизительно постоянной скоростью
вращения. Подобное регулирование
скорости применяется только для
двигателей весьма малой мощности (рн <
30 - 50 вт).
Регулирование
скорости вращения асинхронных двигателей
с фазным ротором
Для
двигателей с фазным ротором можно в
принципе использовать все те же
способы регулирования скорости вращения,
как и для двигателей с короткозамкнутым
ротором. Однако на практике из числа
этих способов для двигателей с фазным
ротором применяется только способ
регулирования скорости вращения с
помощью реакторов насыщения. Ниже
рассмотрим способы регулирования
скорости вращения, которые специфичны
для двигателей с фазным ротором и в
которых используется возможность
включения регулирующих устройств
во вторичную цепь.
Регулирование
скорости вращения с помощью реостата
в цепи ротора
Регулирование
скорости вращения с помощью реостата
в цепи ротора производится по той же
схеме, что и реостатный пуск двигателя,
но реостат при этом должен быть рассчитан
на длительную работу. При увеличении
активного сопротивления вторичной
цепи вид механической характеристики
двигателя изменяется
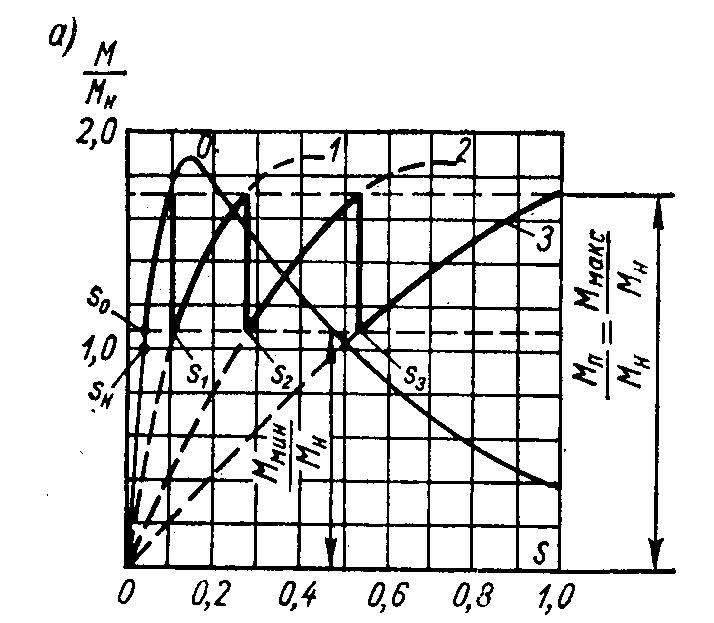 характеристика
становится более мягкой и скольжение
двигателя при том же моменте
нагрузки Мст увеличивается.
При Мст = const рабочее
скольжение s с
большой точностью пропорционально sm и,
следовательно, активному сопротивлению
цепи ротора. Поэтому скольжения s и
s', соответствующие случаям rд = 0
и
характеристика
становится более мягкой и скольжение
двигателя при том же моменте
нагрузки Мст увеличивается.
При Мст = const рабочее
скольжение s с
большой точностью пропорционально sm и,
следовательно, активному сопротивлению
цепи ротора. Поэтому скольжения s и
s', соответствующие случаям rд = 0
и ![]() ,
находятся в соотношении
,
находятся в соотношении
![]() откуда
значение rд,
необходимое для получения
скольжения s', равно
откуда
значение rд,
необходимое для получения
скольжения s', равно
![]() Рассматриваемый
способ регулирования скорости связан
со значительными потерями энергии в
сопротивлении rд и
поэтому малоэкономичен.
Он
применяется главным образом при
кратковременной или повторно-кратковременной
работе (например, пуско-наладочные
режимы некоторых машин, крановые
устройства и пр.), а также в приводах с
вентиляторным моментом.
В
последнем случае мощность на валу с
уменьшением скорости быстро снижается,
и поэтому мощность скольжения и потери
в цепи ротора по величине ограничены.
К
недостаткам реостатного регулирования
скорости относятся также мягкость
механических характеристик и зависимость
диапазона регулирования от величины
нагрузки. В частности, регулирование
скорости на холостом ходу практически
невозможно.
Регулирование
скорости вращения посредством введения
добавочной э. д. с. во вторичную цепь
двигателя.
Регулирование
скорости вращения асинхронного двигателя
путем увеличения его скольжения всегда
связано с выделением во вторичной цепи
двигателя значительной электрической
мощности скольжения
Рассматриваемый
способ регулирования скорости связан
со значительными потерями энергии в
сопротивлении rд и
поэтому малоэкономичен.
Он
применяется главным образом при
кратковременной или повторно-кратковременной
работе (например, пуско-наладочные
режимы некоторых машин, крановые
устройства и пр.), а также в приводах с
вентиляторным моментом.
В
последнем случае мощность на валу с
уменьшением скорости быстро снижается,
и поэтому мощность скольжения и потери
в цепи ротора по величине ограничены.
К
недостаткам реостатного регулирования
скорости относятся также мягкость
механических характеристик и зависимость
диапазона регулирования от величины
нагрузки. В частности, регулирование
скорости на холостом ходу практически
невозможно.
Регулирование
скорости вращения посредством введения
добавочной э. д. с. во вторичную цепь
двигателя.
Регулирование
скорости вращения асинхронного двигателя
путем увеличения его скольжения всегда
связано с выделением во вторичной цепи
двигателя значительной электрической
мощности скольжения
![]() большая
часть которой при реостатном регулировании
теряется в реостате. Поэтому, естественно,
возникает мысль о полезном использовании
этой мощности и о повышении таким образом
к. п. д. установки.
Полезное
использование мощности скольжения
возможно, если вместо реостата присоединить
к контактным кольцам фазного двигателя
приемник электрической энергии в виде
подходящей для этой цели вспомогательной
электрической машины.
Эта
машина будет работать в режиме двигателя
и оказывать воздействие на регулируемый
асинхронный двигатель, развивая
напряжение на его вторичных зажимах,
так как при вращении вспомогательной
машины в ее якоре индуктируется э. д.
с.
Можно
также сказать, что задачей вспомогательной
машины, как и реостата при реостатном
регулировании, является создание
«подпора» напряжения на контактных
кольцах регулируемого асинхронного
двигателя, ибо наличие определенного
напряжения на кольцах
большая
часть которой при реостатном регулировании
теряется в реостате. Поэтому, естественно,
возникает мысль о полезном использовании
этой мощности и о повышении таким образом
к. п. д. установки.
Полезное
использование мощности скольжения
возможно, если вместо реостата присоединить
к контактным кольцам фазного двигателя
приемник электрической энергии в виде
подходящей для этой цели вспомогательной
электрической машины.
Эта
машина будет работать в режиме двигателя
и оказывать воздействие на регулируемый
асинхронный двигатель, развивая
напряжение на его вторичных зажимах,
так как при вращении вспомогательной
машины в ее якоре индуктируется э. д.
с.
Можно
также сказать, что задачей вспомогательной
машины, как и реостата при реостатном
регулировании, является создание
«подпора» напряжения на контактных
кольцах регулируемого асинхронного
двигателя, ибо наличие определенного
напряжения на кольцах ![]() —
непременное условие выдачи с этих колец
определенной мощности
—
непременное условие выдачи с этих колец
определенной мощности
![]() во
внешнюю цепь двигателя. Вместе с тем,
вспомогательная машина в отличие от
реостата позволяет полезно использовать
эту мощность. Прежде всего рассмотрим
вопрос о влиянии на работу фазного
асинхронного двигателя внешней добавочной
э.д.с. Е2, вводимой
во вторичную цепь двигателя с помощью
его контактных колец, при условии, что
частота этой добавочной э. д. с. всегда
равна частоте вторичного тока и
э.д.с.
во
внешнюю цепь двигателя. Вместе с тем,
вспомогательная машина в отличие от
реостата позволяет полезно использовать
эту мощность. Прежде всего рассмотрим
вопрос о влиянии на работу фазного
асинхронного двигателя внешней добавочной
э.д.с. Е2, вводимой
во вторичную цепь двигателя с помощью
его контактных колец, при условии, что
частота этой добавочной э. д. с. всегда
равна частоте вторичного тока и
э.д.с. ![]() самого
двигателя.
На
рис.1,а, изображена
векторная диаграмма вторичной цепи
асинхронного двигателя при Ед =
0.
Вторичный ток двигателя
самого
двигателя.
На
рис.1,а, изображена
векторная диаграмма вторичной цепи
асинхронного двигателя при Ед =
0.
Вторичный ток двигателя
![]()
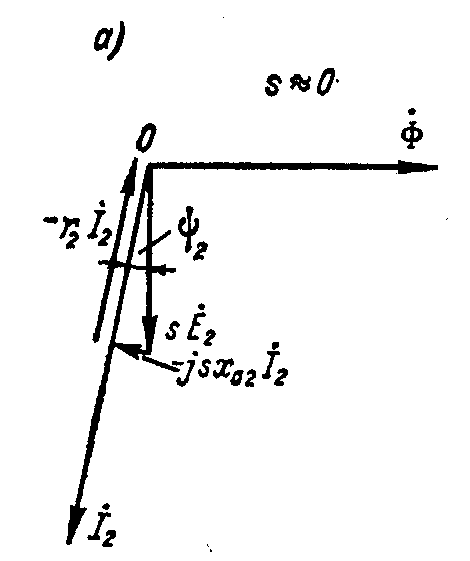 имеет
величину, необходимую для создания
нужного электромагнитного момента ^ М в
соответствии с величиной момента
нагрузки Мст на
валу.
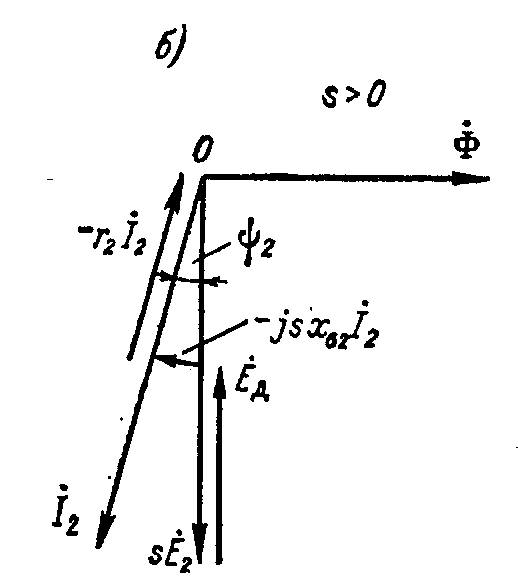
Если
теперь во вторичную цепь ввести э. д.
с. Ед встречно
э. д. с. скольжения E2s в
этой же цепи, то вторичный ток
имеет
величину, необходимую для создания
нужного электромагнитного момента ^ М в
соответствии с величиной момента
нагрузки Мст на
валу.
Если
теперь во вторичную цепь ввести э. д.
с. Ед встречно
э. д. с. скольжения E2s в
этой же цепи, то вторичный ток
![]() в
первый момент времени уменьшится.
Поэтому развиваемый двигателем
момент ^ М также
уменьшится, двигатель начнет тормозиться,
а скольжение s - увеличиваться. При этом
ток Iа,
а вместе с ним и момент М будут
увеличиваться. Это будет происходить
до тех пор, пока опять не наступит
равновесие моментов М =
Мст„
на валу. Двигатель при этом будет работать
с увеличенным скольжением s, а векторная
диаграмма вторичной цепи приобретет
вид, изображенный на рис.1,б.
в
первый момент времени уменьшится.
Поэтому развиваемый двигателем
момент ^ М также
уменьшится, двигатель начнет тормозиться,
а скольжение s - увеличиваться. При этом
ток Iа,
а вместе с ним и момент М будут
увеличиваться. Это будет происходить
до тех пор, пока опять не наступит
равновесие моментов М =
Мст„
на валу. Двигатель при этом будет работать
с увеличенным скольжением s, а векторная
диаграмма вторичной цепи приобретет
вид, изображенный на рис.1,б.
 Очевидно,
что посредством регулирования
величины Ед можно
регулировать величину s и, следовательно,
скорость вращения двигателя.
Предположим
теперь, что э.д.с. Ед имеет
по сравнению с рассмотренным случаем
противоположное направление и совпадает
по фазе с э. д. с.
Очевидно,
что посредством регулирования
величины Ед можно
регулировать величину s и, следовательно,
скорость вращения двигателя.
Предположим
теперь, что э.д.с. Ед имеет
по сравнению с рассмотренным случаем
противоположное направление и совпадает
по фазе с э. д. с. ![]() на
рис. 1, а. Тогда
вместо получим
на
рис. 1, а. Тогда
вместо получим
![]()
![]() В
первый момент после введения э. д.
с. Ед ток I2 и
момент М возрастут,
двигатель будет ускоряться и s будет
уменьшаться. При достаточной
величине Ед величина
s уменьшится до нуля, и если ток Iа.
создаваемый в этом случае только за
счет действия Ед, все
еще будет велик по сравнению с током,
необходимым для создания момента М =
Мст то
ускорение двигателя будет продолжаться
и скорость превысит синхронную. Скольжение
s и э. д. с.
при
этом изменят знаки и будут расти по
абсолютной величине до тех пор, пока
ток не упадет до необходимой величины.
При s < 0 угол
В
первый момент после введения э. д.
с. Ед ток I2 и
момент М возрастут,
двигатель будет ускоряться и s будет
уменьшаться. При достаточной
величине Ед величина
s уменьшится до нуля, и если ток Iа.
создаваемый в этом случае только за
счет действия Ед, все
еще будет велик по сравнению с током,
необходимым для создания момента М =
Мст то
ускорение двигателя будет продолжаться
и скорость превысит синхронную. Скольжение
s и э. д. с.
при
этом изменят знаки и будут расти по
абсолютной величине до тех пор, пока
ток не упадет до необходимой величины.
При s < 0 угол
![]() отрицательный
и векторная диаграмма вторичной цепи
двигателя имеет вид,
отрицательный
и векторная диаграмма вторичной цепи
двигателя имеет вид,
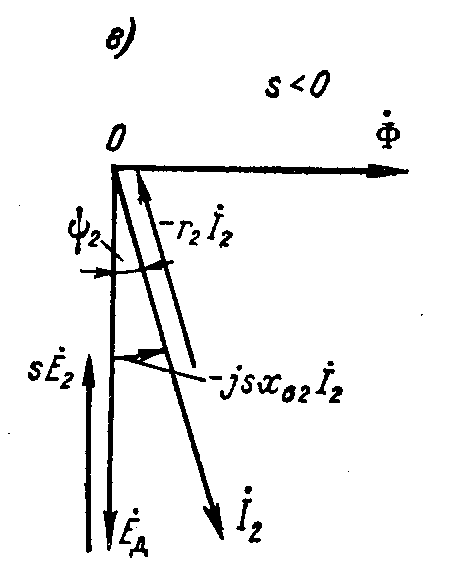 Ток
Ток ![]() при
этом будет иметь составляющую,
совпадающую с Ф. Поэтому намагничивающий
ток, потребляемый из первичной цепи,
уменьшится и cos
при
этом будет иметь составляющую,
совпадающую с Ф. Поэтому намагничивающий
ток, потребляемый из первичной цепи,
уменьшится и cos![]() двигателя
повысится.
Таким
образом, с помощью добавочной э. д.
с. Ед, путем
изменения ее величины и направления,
можно осуществить плавное двухзонное
регулирование скорости двигателя: ниже
и выше синхронной.
^ СИНХРОНЫЕ
МАШИНЫ.
УСТРОЙСТВО
И ПРИНЦИП ДЕЙСТВИЯ.
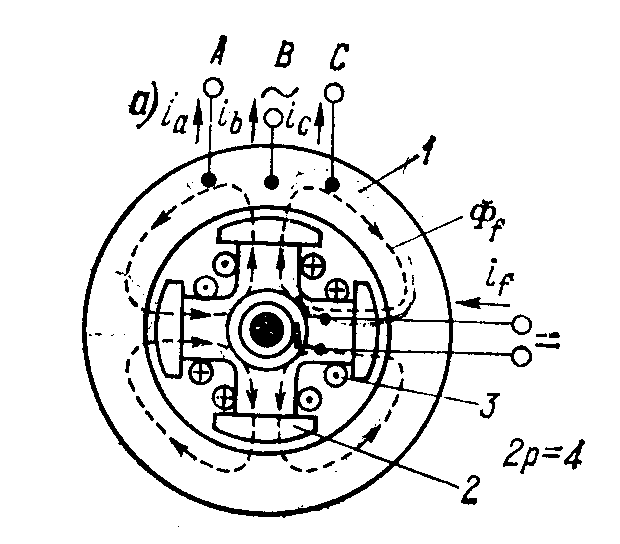
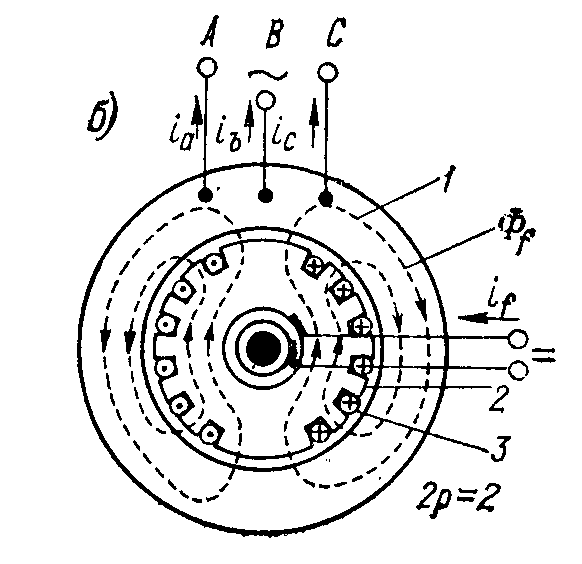
Статор
синхронной машины имеет такое же
устройство, как и статор асинхронной
машины. Трехфазная или в общем случае
m-фазная обмотка машины выполняется с
таким же числом полюсов, как и ротор, и
называется так же обмоткой. Сердечник
ротора вместе с обмоткой называется
также якорем. На рис. условно показаны
только выводные концы А,
В, С обмотки
статора.
двигателя
повысится.
Таким
образом, с помощью добавочной э. д.
с. Ед, путем
изменения ее величины и направления,
можно осуществить плавное двухзонное
регулирование скорости двигателя: ниже
и выше синхронной.
^ СИНХРОНЫЕ
МАШИНЫ.
УСТРОЙСТВО
И ПРИНЦИП ДЕЙСТВИЯ.
Статор
синхронной машины имеет такое же
устройство, как и статор асинхронной
машины. Трехфазная или в общем случае
m-фазная обмотка машины выполняется с
таким же числом полюсов, как и ротор, и
называется так же обмоткой. Сердечник
ротора вместе с обмоткой называется
также якорем. На рис. условно показаны
только выводные концы А,
В, С обмотки
статора.
 Рис
1, а.
Ротор
синхронной машины имеет обмотку
возбуждения, питаемую через два
контактных кольца и щетки постоянным
током от
Рис
1, а.
Ротор
синхронной машины имеет обмотку
возбуждения, питаемую через два
контактных кольца и щетки постоянным
током от
 Рис
1,б
постороннего
источника. В качестве источника чаще
всего служит генератор постоянного
тока относительно небольшой мощности
(0,3—3,0% от мощности синхронной машины),
который называется возбудителем и
устанавливается обычно на одном валу
с синхронной машиной. Назначение обмотки
возбуждения — создание в машине
первичного магнитного поля. Ротор вместе
со своей обмоткой возбуждения называется
также индуктором. При изготовлении
синхронных машин принимаются меры к
тому, чтобы распределение индукции поля
возбуждения вдоль окружности статора
было по возможности близко к
синусоидальному.
Если
ротор синхронной машины привести во
вращение с некоторой скоростью п
об/сек и
возбудить его, то поток возбуждения Фf будет
пересекать проводники обмотки статора
и в фазах последней будут индуктироваться
э. д. с. с частотой
Рис
1,б
постороннего
источника. В качестве источника чаще
всего служит генератор постоянного
тока относительно небольшой мощности
(0,3—3,0% от мощности синхронной машины),
который называется возбудителем и
устанавливается обычно на одном валу
с синхронной машиной. Назначение обмотки
возбуждения — создание в машине
первичного магнитного поля. Ротор вместе
со своей обмоткой возбуждения называется
также индуктором. При изготовлении
синхронных машин принимаются меры к
тому, чтобы распределение индукции поля
возбуждения вдоль окружности статора
было по возможности близко к
синусоидальному.
Если
ротор синхронной машины привести во
вращение с некоторой скоростью п
об/сек и
возбудить его, то поток возбуждения Фf будет
пересекать проводники обмотки статора
и в фазах последней будут индуктироваться
э. д. с. с частотой
![]() Э.
д. с. статора составляют симметричную
трехфазную систему э. д. с., и при
подключении к обмотке статора симметричной
нагрузки эта обмотка нагрузится
симметричной системой токов. Машина
при этом будет работать в режиме
генератора.
При
нагрузке обмотка статора создает такое
же по своему характеру вращающееся
магнитное поле, как и обмотка статора
асинхронной машины. Это поле статора
вращается в направлении вращения ротора
со скоростью
Э.
д. с. статора составляют симметричную
трехфазную систему э. д. с., и при
подключении к обмотке статора симметричной
нагрузки эта обмотка нагрузится
симметричной системой токов. Машина
при этом будет работать в режиме
генератора.
При
нагрузке обмотка статора создает такое
же по своему характеру вращающееся
магнитное поле, как и обмотка статора
асинхронной машины. Это поле статора
вращается в направлении вращения ротора
со скоростью
![]() об/сек.
Если
подставить сюда f1 из
формулы, то получим
об/сек.
Если
подставить сюда f1 из
формулы, то получим
![]() .
Поля
статора и ротора вращаются с одинаковой
скоростью и образуют, таким образом,
общее вращающееся поле, как и в асинхронной
машине.
Поле
статора (якоря) оказывает воздействие
на поле ротора (индуктора) и называется
в связи с этим также полем реакции
якоря.
Синхронная
машина может работать и в качестве
двигателя, если подвести к обмотке ее
статора трехфазный ток из сети. В этом
случае в результате взаимодействия
магнитных полей статора и ротора поле
статора увлекает за собой ротор. При
этом ротор вращается в ту же сторону и
с такой же скоростью, как и поле
статора.
Из
формулы следует, что чем больше число
пар полюсов синхронной машины р, тем
меньше должна быть ее скорость
вращения f1 для
получения заданной частоты f1.
По
своей конструкции синхронные машины
подразделяются на явнополюсные (Рис
1,а) и
неявнополюсные (Рис 1,б).
.
Поля
статора и ротора вращаются с одинаковой
скоростью и образуют, таким образом,
общее вращающееся поле, как и в асинхронной
машине.
Поле
статора (якоря) оказывает воздействие
на поле ротора (индуктора) и называется
в связи с этим также полем реакции
якоря.
Синхронная
машина может работать и в качестве
двигателя, если подвести к обмотке ее
статора трехфазный ток из сети. В этом
случае в результате взаимодействия
магнитных полей статора и ротора поле
статора увлекает за собой ротор. При
этом ротор вращается в ту же сторону и
с такой же скоростью, как и поле
статора.
Из
формулы следует, что чем больше число
пар полюсов синхронной машины р, тем
меньше должна быть ее скорость
вращения f1 для
получения заданной частоты f1.
По
своей конструкции синхронные машины
подразделяются на явнополюсные (Рис
1,а) и
неявнополюсные (Рис 1,б).
30. РАЗОМКНУТАЯ СУЭП
РАЗОМКНУТАЯ СУЭП (или система без О.С.)- это система, в которой управление u(t) формируется в зависимости только от внешних воздействий: u(t) = [x(t), f(t)].
Применение разомкнутых АСУЭП:
Обеспечение определенной последовательности управления ЭП.
Пуск с ограничением момента (в резистивных ЭП).
Регуляторы скорости с малым диапазоном регулирования.
Стабилизаторы скорости (с каналом компенсации возмущения).
Функциональная схема разомкнутой СУ представлена на рис. 6.1.
Рис. 6.1.
КО - командный орган;
УУ - устройство управления;
СПУ - силовое переключающее устройство;
ТМ - технологичный механизм;
КСМ - контроль скорости и момента;
КП - контроль положения.
Подключение двигателя ЭД к сети обеспечивается СПУ, получающего команды от УУ.
КО обеспечивает подачу команд на пуск-торможение-реверс-останов. Устройства КСМ и КП обеспечивают контроль координат ЭП. В системах без ограничения момента (тока) формирование переходных процессов не предусматривается. Такие СУ типичны для АД с к.з. ротором, маломощных ДПТ.
Наиболее просто СУ реализуется для короткозамкнутого АД: после подачи команды на пуск осуществляется прямое включение АД на полное напряжение сети (рис. 6.2.).
Используется для построения СУ первой группы ЭП электроаппараты (контактные и бесконтактные) релейного действия.
Для включения и отключения силовых цепей применяют электромагнитные контакторы, пускатели, статические (тиристорные) переключатели. Для подачи командных сигналов - командоаппараты: кнопки Пуск, Стоп (СУ рис.6.2, схема 1), командоконтроллеры (СУ Рис.6.2, схема 2), путевые и конечные выключатели, датчики давления, температуры и других технологических параметров.
В СУ схеме для подачи напряжения в схему управления необходимо командоконтроллер установить в положении "О", при этом включаем РН и ставится на самопитание через свои нормально разомкнутые контакты РН. При перерыве в энергоснабжении при работе ЭП повторное включение ЭД возможно после установления К\К в положение "О".
Большое место в СУЭП занимают резисторные ЭП без регулирования скорости ,т.е. работающие с постоянной установившейся скоростью (АД с ф.р., ДПТ средней мощности (>7кВт)).Резисторные СУЭП обеспечивают динамические и статические режимы работы. Ступенчатое переключение резисторов, реакторов или других элементов в силовых цепях ЭД обеспечивает возможность ограничения момента (тока) в определенных пределах.
Количество ступеней определяет точность стабилизации момента при пуске или торможении, или обеспечивает требуемый момент в переходных режимах.
Управление производится автоматическим отключением резисторов через определенные промежутки времени t1,t2, ... ,tn, при достижении определенной скорости или определенной величине тока I т.п. (рис.6.3).
Рис. 6.3.
Таким образом, управление пуском в принципе может быть осуществлено:
в функции времени;
в функции скорости;
в функции тока;
в функции ЭДС;
в функции пути.
Управление в функции времени f(t) предполагает, что в СУ есть аппараты, контролирующие время, т.е. реле времени, настраиваемые на отсчет определенных, наперед заданных выдержек времени. Каждое реле включает соответствующий контактор ускорения, силовой контакт которого закорачивает нужную ступень пускового сопротивления.
Для линейных механических характеристик двигателя при Мс=const время разгона привода на i- й ступени пуска:
где - электромеханическая постоянная времени привода на i- й ступени;
начi, конi, Мначi, Мконi,- начальные и конечные значения скорости и момента двигателя на i- й ступени;
J- момент инерции привода, приведенный к валу двигателя.
Время торможения определяется из условия:
Выдержка реле времени определяется с учетом собственного времени включения (отключения) контактора:
Управление в функции скорости производится при помощи реле, контролирующих скорость двигателя непосредственно или косвенно.
При достижении заданного значения скорости соответствующее реле выдает команду на включение контактора ускорения. Наиболее употребительны косвенные способы, в которых используются величины, пропорциональные скорости двигателя: ЭДС якоря (для ДПТ), ЭДС или частоту тока ротора (для АД с фазным ротором и СД). В этих случаях говорят об управлении в функции ЭДС или частоты.
Управление в функции тока реализуется применением реле минимального тока. Эти реле включают контактор ускорения при снижении пускового тока до значения тока переключения.
31.
Cистемы управления электроприводами |
|
|
Ф Задачами управления электроприводами являются: осуществление пуска, регулирование скорости, торможение, реверсирование рабочей машины, поддержание ее режима работы в соответствии с требованиями технологического процесса, управление положением рабочего органа машины. При этом должны быть обеспечены наибольшая производительность машины или механизма, наименьшие капитальные затраты и расход электроэнергии. Конструкция рабочей машины, вид электропривода и система его управления связаны между собой. Поэтому выбор, проектирование и исследование системы управления электроприводом должны осуществляться с учетом конструкции рабочей машины, ее назначения, особенностей и условий работы. Кроме основных функций системы управления электроприводами могут выполнять некоторые дополнительные функции, к которым относятся сигнализация, защита, блокировки и пр. Обычно системы управления одновременно выполняют несколько функций.
С
По способу управления различают системы ручного, полуавтоматического (автоматизированного) и автоматического управления. Ручным называется управление, при котором оператор непосредственно воздействует на простейшие аппараты управления. Недостатками такого управления являются необходимость расположения аппаратов вблизи электропривода, обязательное присутствие оператора, низкие точность и быстродействие системы управления. Поэтому ручное управление находит ограниченное применение. Управление называется полуавтоматическим, если его осуществляет оператор путем воздействия на различные автоматические устройства, выполняющие отдельные операции. При этом обеспечивается высокая точность управления, возможность дистанционного управления, снижается утомляемость оператора. Однако при таком управлении ограничено быстродействие, так как оператор может затрачивать время на принятие решения о требуемом режиме управления в зависимости от изменившихся условий работы.
У
По роду выполняемых в производственном процессе основных функцийсистемы полуавтоматического и автоматического управления электроприводами можно разделить на несколько групп. К первой группе относятся системы, обеспечивающие автоматические пуск, остановку и реверсирование электропривода. Скорость таких приводов не регулируется, поэтому они называются нерегулируемыми. Такие системы применяются в электроприводах насосов, вентиляторов, компрессоров, конвейеров, лебедок вспомогательных механизмов и т. п. Ко второй группе относятся системы управления, которые кроме выполнения функций, обеспечиваемых системами первой группы, позволяют регулировать скорость электроприводов. Подобного рода системы электроприводов называются регулируемыми и применяются в грузоподъемных устройствах, транспортных средствах и пр. К третьей группе относятся системы управления, обеспечивающие кроме вышеуказанных функций возможность регулирования и поддержания определенной точности, постоянства различных параметров (скорости, ускорения, тока, мощности и т. д.) при изменяющихся производственных условиях. Такие системы автоматического управления, содержащие обычно обратные связи, называются системами автоматической стабилизации.
К
К пятой группе относятся системы управления, обеспечивающие работу отдельных машин и механизмов или целых комплексов по заранее заданной программе, называемые программными системами. Первые четыре группы систем управления электроприводами обычно входят как составные части в систему пятой группы. Кроме того, эти системы снабжаются программными устройствами, датчиками и другими элементами. К шестой группе относятся системы управления, которые обеспечивают не только автоматическое управление электроприводами, включая системы первых пяти групп, но и автоматический выбор наиболее рациональных режимов работы машин. Такие системы называются системами оптимального управления или самонастраивающимися. Они обычно содержат вычислительные машины, которые анализируют ход технологического процесса и вырабатывают командные сигналы, обеспечивающие наиболее оптимальный режим работы.
И
К системам автоматического управления предъявляются следующие основные требования: обеспечение режимов работы, необходимых для осуществления технологического процесса машиной или механизмом, простота системы управления, надежность системы управления, экономичность системы управления, определяемая стоимостью аппаратуры, затратами энергии, а также надежностью, гибкость и удобство управления, удобство монтажа, эксплуатации и ремонта систем управления. По необходимости предъявляются дополнительные требования: взрывобезопасность, искробезопасность, бесшумность, стойкость к вибрации, значительным ускорениям и пр. |
 ункции
систем управления электроприводами,
их классификация и предъявляемые к
ним требования
ункции
систем управления электроприводами,
их классификация и предъявляемые к
ним требования истемы
управления электроприводами делят
на различные группы в зависимости от
главного признака, положенного в
основу классификации.
истемы
управления электроприводами делят
на различные группы в зависимости от
главного признака, положенного в
основу классификации. правление
называется автоматическим,
если все операции управления
осуществляются автоматическими
устройствами без непосредственного
участия человека. В этом случае
обеспечиваются наибольшие быстродействие
и точность управления системы
автоматического управления по мере
развития средств автоматики получают
все большее распространение.
правление
называется автоматическим,
если все операции управления
осуществляются автоматическими
устройствами без непосредственного
участия человека. В этом случае
обеспечиваются наибольшие быстродействие
и точность управления системы
автоматического управления по мере
развития средств автоматики получают
все большее распространение. четвертой группе относятся системы,
которые обеспечивают слежение за
сигналом управления, закон изменения
которого заранее не известен. Такие
системы управления электроприводами
называют следящими
системами.
Параметрами, за которыми обычно
осуществляется слежение, являются
линейные перемещения, температура,
количество воды или воздуха и пр.
четвертой группе относятся системы,
которые обеспечивают слежение за
сигналом управления, закон изменения
которого заранее не известен. Такие
системы управления электроприводами
называют следящими
системами.
Параметрами, за которыми обычно
осуществляется слежение, являются
линейные перемещения, температура,
количество воды или воздуха и пр. ногда
классификацию систем автоматического
управления осуществляют по
типу применяемых аппаратов.
Так, различают системы релейно-контакторные,
электромашинные, магнитные,
полупроводниковые. Важнейшей
дополнительной функцией управления
является защита
электропривода.
ногда
классификацию систем автоматического
управления осуществляют по
типу применяемых аппаратов.
Так, различают системы релейно-контакторные,
электромашинные, магнитные,
полупроводниковые. Важнейшей
дополнительной функцией управления
является защита
электропривода.32.___________-------------
33)
КОНТАКТНАЯ АППАРАТУРА (пускатели, реле, приставки, схемы подключения, кнопки, посты кнопочные, посты тельферные) |
|

Пускатели серии ПМЛ ТУ У 3.11-05814256-097-97, производства НПО «ЭТАЛ», рекомендуются к применению с электродвигателями, что гарантирует экологически чистую и безотказную работу в самых различных отраслях промышленности, на объектах атомной энергетики (АЭС) и морских судах. Гарантийный срок эксплуатации пускателей - 2 года со дня ввода в эксплуатацию.
Средний срок службы пускателей - 15 лет согласно ГОСТ 2491.
Внутри страны изготавливаются пускатели для поставок: общепромышленного; тропического; морского исполнений, и для поставок на АЭС с коэффициентом =1,8;
Используются пускатели при температуре от минус 40 ° С до плюс 55 ° С.
НАЗНАЧЕНИЕ
Пускатели предназначены для применения в стационарных установках для дистанционного пуска непосредственным подключением к сети, остановки и реверсирования трехфазных асинхронных электродвигателей с короткозамкнутым ротором переменного тока частоты 50 и 60Гц; в исполнении с тепловым реле – для защиты управляемых электродвигателей от перегрузок недопустимой продолжительности.
При наличии тепловых реле пускатели осуществляют защиту управляемых электродвигателей от перегрузки недопустимой продолжительности и от токов, возникающих при обрыве одной из фаз. Пускатели, комплектуемые ограничителями перенапряжений, пригодны для работы в системах управления с применением микропроцессорной техники.
МАГНИТНЫЕ ПУСКАТЕЛИ КЛАССИФИЦИРУЮТСЯ
по назначению (нереверсивные, реверсивные),
наличию или отсутствию тепловых реле и кнопок управления,
степени защиты от воздействия окружающей среды,
рабочему напряжению катушки.
КАТЕГОРИЯ ПРИМЕНЕНИЯ ПУСКАТЕЛЕЙ
34.
Автоматические выключатели |
|
|
Как работает автоматический выключатель Автоматические выключатели (выключатели, автоматы) являются коммутационными электрическими аппаратами, предназначенными для проведения тока цепи в нормальных режимах и для автоматической защиты электрических сетей и оборудования от аварийных режимов (токов короткого замыкания, токов перегрузки, снижения или исчезновения напряжения, изменения направления тока, возникновения магнитного поля мощных генераторов в аварийных условиях и др.), а также для нечастой коммутации номинальных токов (6-30 раз в сутки). Благодаря простоте, удобству, безопасности обслуживания и надежности защиты от токов короткого замыкания эти аппараты широко применяются в электрических установках малой и большой мощности. Автоматические выключатели относятся к коммутационным аппаратам ручного управления, однако многие типы имеют электромагнитный или электродвигательный привод, что дает возможность управлять ими на расстоянии. Принцип действия Выключаются автоматы обычно вручную (приводом или дистанционно), а при нарушении нормального режима эксплуатации (появление сверхтоков или снижение напряжения) - автоматически. При этом каждый автомат снабжается расцепителем максимального, а в некоторых типах расцепителем минимального напряжения. По выполняемым функциям защиты автоматические выключатели делятся на автоматы: максимального тока, понижения напряжения и обратной мощности. Автоматы максимального тока служат для автоматического размыкания электрической цепи при возникновении в ней токов короткого замыкания и перегрузок сверх установленного предела. Заменяя собой, рубильник и плавкий предохранитель, они обеспечивают более надежную и избирательную защиту при нештатных режимах. Если условия среды отличны от нормальных (влажность воздуха выше 85% и в нем содержатся примеси вредных паров), то автоматические выключатели следует помещать в ящики и шкафы пылевлагонепроницаемого и химостойкого исполнения. Классификация Автоматические выключатели подразделяются на:
Быстродействие обеспечивается самим принципом действия (поляризованный электромагнитный или индукционно-динамический принципы и др.), а также условиями для быстрого гашения электрической дуги. Подобный принцип используется в токоограничивающих автоматах;
Конструкция Особенности конструкции и принцип действия автомата определяются его назначением и сферой применения. Включение и выключение автомата может производиться вручную, электродвигательным или электромагнитным приводом. Ручной привод применяется при номинальных токах до 1000 А и обеспечивает гарантируемую предельную коммутационную способность вне зависимости от скорости движения включающей рукоятки (оператор должен производить операцию включения решительно: начав — доводить до конца). Электромагнитный и электродвигательный приводы питаются от источников напряжения. Схема управления привода должна иметь защиту от повторного включения на короткозамкнутую цепь, при этом процесс включения автомата на предельные токи короткого замыкания должен прекратиться при напряжении питания 85 - 110% от номинального. При перегрузках и токах короткого замыкания отключение выключателя производится независимо от того, удерживается ли рукоятка управления во включенном положении. Важной составной частью автомата является расцепитель, который контролирует заданный параметр защищаемой цепи и воздействует на расцепляющее устройство, отключающее автомат. Кроме того, расцепитель позволяет производить дистанционное отключение автомата. Наиболее широкое распространение получили расцепители следующих типов:
Для коммутации цепи без тока или для редких коммутаций номинального тока могут применяться автоматы без расцепителей. Выпускаемые промышленностью серии автоматических выключателей рассчитаны на применение в различных климатических поясах, размещение в местах с разными условиями эксплуатации, на работу в условиях, различных по механическим воздействиям и по взрывоопасности среды, и обладают разной степенью защиты от прикосновения и от внешних воздействий. Информация о конкретных типах аппаратов, их типоисполнениях и типоразмерах приведена в нормативно-технических документах. Как правило, таким документом являются Технические условия (ТУ) завода. В некоторых случаях с целью унификации для изделий, имеющих широкое применение и производимых несколькими предприятиями, уровень документа повышается (иногда до уровня Государственного стандарта). Автоматические выключатели состоят из следующих основных узлов:
Контактная система состоит из неподвижных контактов, закрепленных в корпусе, и подвижных контактов, шарнирно посаженных на полуоси рычага механизма управления, и обеспечивает, обычно, одинарный разрыв цепи. Дугогасительное устройство устанавливается в каждом полюсе выключателя и предназначается для локализации электрической дуги в ограниченном объеме. Оно представляет собой дугогасительную камеру с деионной решеткой из стальных пластин. Могут быть предусмотрены также искрогасители, представляющие собой фибровые пластины. Механизм свободного расцепления представляет собой шарнирный 3- или 4-звенный механизм, который обеспечивает расцепление и отключение контактной системы как при автоматическом, так и при ручном управлении. Электромагнитный максимальный расцепитель тока, представляющий собой электромагнит с якорем, обеспечивает автоматическое отключение выключателя при токах короткого замыкания, превышающих уставку по току. Электромагнитные расцепители тока с устройством гидравлического замедления срабатывания имеют обратнозависимую от тока выдержку времени для защиты от токов перегрузки. Тепловой максимальный расцепитель представляет собой термобиметаллическую пластину. При токах перегрузки деформация и усилия этой пластины обеспечивают автоматическое отключение выключателя. Выдержка времени уменьшается с ростом тока. Полупроводниковые расцепители состоят из измерительного элемента, блока полупроводниковых реле и выходного электромагнита, воздействующего на механизм свободного расцепления автомата. В качестве измерительного элемента используется трансформатор тока (на переменном токе) или дроссельный магнитный усилитель (на постоянном токе). Полупроводниковый расцепитель тока допускает регулировку следующих параметров:
Во многих автоматах применяют комбинированные расцепители, использующие тепловые элементы для защиты от токов перегрузок и электромагнитные для защиты от токов коротких замыканий без выдержки времени (отсечки). Выключатель имеет также дополнительные сборочные единицы, которые встраиваются в выключатель или крепятся к нему снаружи. Ими могут быть независимый, нулевой и минимальный расцепители, свободные и вспомогательные контакты, ручной и электромагнитный дистанционный привод, сигнализация автоматического отключения, устройство для запирания выключателя в положении „отключено". Независимый расцепитель представляет собой электромагнит с питанием от постороннего источника напряжения. Минимальный и нулевой расцепители могут выполняться с выдержкой времени и без выдержки времени. С помощью независимого или минимального расцепителя возможно дистанционное отключение автомата. Условия эксплуатации Автоматические выключатели выпускаются в исполнениях с разной степенью защиты от прикосновений и внешних воздействий (IPOO, IP20, IP30, IP54). При этом степень защиты зажимов для присоединения внешних проводников может быть ниже степени защиты оболочки выключателя. Выключатели изготавливают в 5-ти климатических исполнениях и 5-ти категорий размещения, что кодируется буквами У, УХЛ, Т, М, ОМ и цифрами 1,2,3,4,5. Выключатели рассчитаны для работы в продолжительном режиме в следующих условиях:
Группы условий эксплуатации электротехнических изделий в части воздействия механических факторов внешней среды определены ГОСТ 17516.1-90. В соответствии с данными каталогов автоматические выключатели предназначены для эксплуатации в группах Ml, М2, МЗ, М4, Мб, М9, М19, М25. По технике безопасности автоматические выключатели соответствуют ГОСТ 12.2.007.0-75 и ГОСТ 12.2.007.6-75, требованиям „Правил устройств электроустановок" и обеспечивают условия эксплуатации, установленные „Правилами технической эксплуатации установок потребителем" и „Правилами техники безопасности при эксплуатации электроустановок потребителем", утвержденными Госэнергонадзором 21.12.94 г. В части защиты от токов утечки выключатели соответствуют требованиям ГОСТ 12.1.038-82. Эксплуатация в нерабочем состоянии (хранение и транспортирование при перерывах в работе) соответствует ГОСТ 15543-70 и ГОСТ 15150-69. |