

7.4 Прямая регистрация положения с цифровым управлением
При использовании платы с цифровым управлением сигналы датчиков прямой регистрации положения рабочего органа подаются на плату управления SIMODRIVE.
На рисунке 7.10 показан вариант с использованием датчика BERO для регистрации положения шпинделя (функция BERO для привода подачи не разрешена).
Рисунок 7.10 – Управление приводом главного движения с позиционированием посредством датчика BERO
Вместо датчика BERO для прямой регистрации положения может быть применен круговой инкрементальный датчик с выходными сигналами тока (для управления двигателем используются сигналы напряжения 1Vpp). Пример такой схемы приведен на рисунке 7.11.
Рисунок 7.11 – Управление приводом главного движения с прямой регистрацией положения инкрементальным датчиком
Для управления приводом подачи обычно применяются линейные измерительные системы с выходными сигналами напряжения и тока.
На рисунке 7.12 показан пример прямой регистрации положения рабочего органа привода подачи с линейной инкрементальной измерительной системой.
Рисунок 7.12 – Цифровое управление приводом подачи с прямой регистрацией положения
Платы с цифровым управлением SIMODRIVE 611D поддерживают также цифровой двунаправленный интерфейс EnDat для измерительных систем производства компании HEIDENHAIN.
На рисунке 7.13 показан вариант подключения абсолютного датчика с интерфейсом EnDat для прямой регистрации положения в приводе подачи.
Рисунок 7.13 – Цифровое управление приводом подачи с абсолютным датчиком EnDat
При помощи интерфейса EnDat возможна не только передача значений координат, но и передача других данных, содержащихся в датчиках, их актуализация, изменение и сохранение. Данные передаются синхронно с тактовой частотой, задаваемой управляющей электроникой или таймером. Тип передаваемых данных (значения координат, параметры, результаты диагностики и т.д.) определяется командами.
В абсолютных датчиках с интерфейсом EnDat сигналы положения считываются с двух дорожек, а не с 13, как это производится в классических конструкциях. Считанные сигналы sin/cos обрабатываются и сохраняются в модуле датчика. Передача цифровых данных осуществляется по последовательному интерфейсу с тактовой частотой 2 МГц.
7.5 Выбор и подключение модулей структуры привода
Для проектирования структуры привода необходимо сначала выбрать двигатель (с датчиком).
Далее
производится выбор силового модуля
(LT).
Основными параметрами для выбора
силового модуля являются: номинальный
ток двигателя
![]() ,
пиковый ток
,
пиковый ток
![]() и тактовая частота инвертора
и тактовая частота инвертора
![]() (кГц).
(кГц).
При выборе силового модуля для привода подачи (VSA) нужно руководствоваться данными таблицы 7.1.
Таблица 7.1
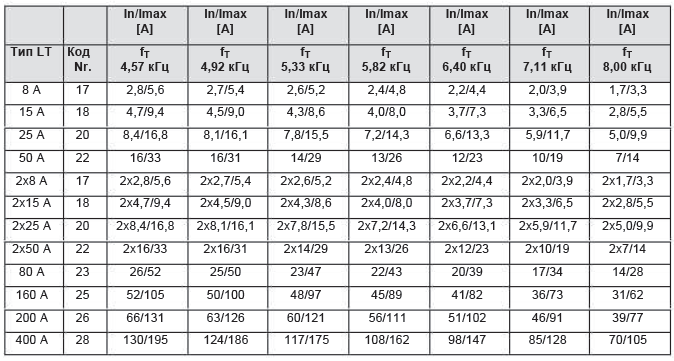
Следует учесть, что предустановленная тактовая частота инвертора на плате управления VSA Digital =4,0 кГц. Из таблицы видно, что с увеличением частоты инвертора значения токов уменьшаются.
Силовой модуль должен быть снабжен платой управления. При выборе платы следует учесть интерфейсы задания скорости и положения, передачи сигналов на верхний уровень, а также возможности подключения опционных датчиков. Для выбора платы управления следует руководствоваться табл. 7.2.
Таблица 7.2
Плата управления |
Оси |
Датчик двигателя |
Двигатель |
Опционный интерфейс |
SIMODRIVE 611U |
1 |
Резольвер |
1FT6, 1FK, 1FE1, 1FN, 1PH, 1LA |
PROFIBUS DP, RS 485 |
SIMODRIVE 611U |
2 |
Резольвер |
1FT6, 1FK, 1FE1, 1PH, 1LA |
PROFIBUS DP, RS 485 |
SIMODRIVE 611U |
2 |
Инкрементальный датчик sin/cos 1Vpp Абсолютный датчик |
1FT6, 1FK, 1FE1, 1PH, 1LA |
PROFIBUS DP, RS 485 |
SIMODRIVE 611А с аналоговым интерфейсом |
2/1 |
Тахогенератор и датчик RLG |
1FT5 |
|
SIMODRIVE 611А с аналоговым интерфейсом |
1 |
Двухполюсный резольвер |
1FK, 1FT6 |
|
SIMODRIVE 611А с аналоговым интерфейсом |
|
Инкрементальный датчик SIZAG H |
1PH |
|
SIMODRIVE 611D с цифровым интерфейсом |
1 |
Инкрементальный датчик sin/cos 1Vpp, EnDat, SSI
|
1FT6, 1FK, 1FE1, 1FN3, 1PH, |
|
SIMODRIVE 611D 611HLA с цифровым интерфейсом |
2 |
Инкрементальный датчик sin/cos 1Vpp, EnDat, SSI |
Гидравлические линейные оси |
|
На рисунке 7.14 показана функциональная схема силового модуля для привода VSA.
На рисунке 7.15 показана схема подключений приводной системы SINUMERIK 840D для фрезерного станка с ЧПУ.
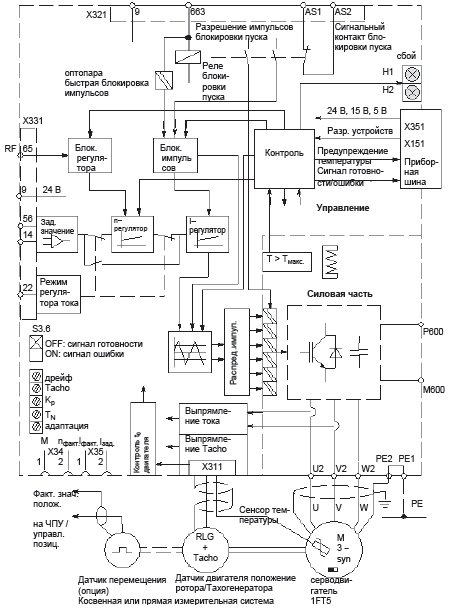
Рисунок 7.14 – Функциональная схема силового модуля VSA с интерфейсом Standard
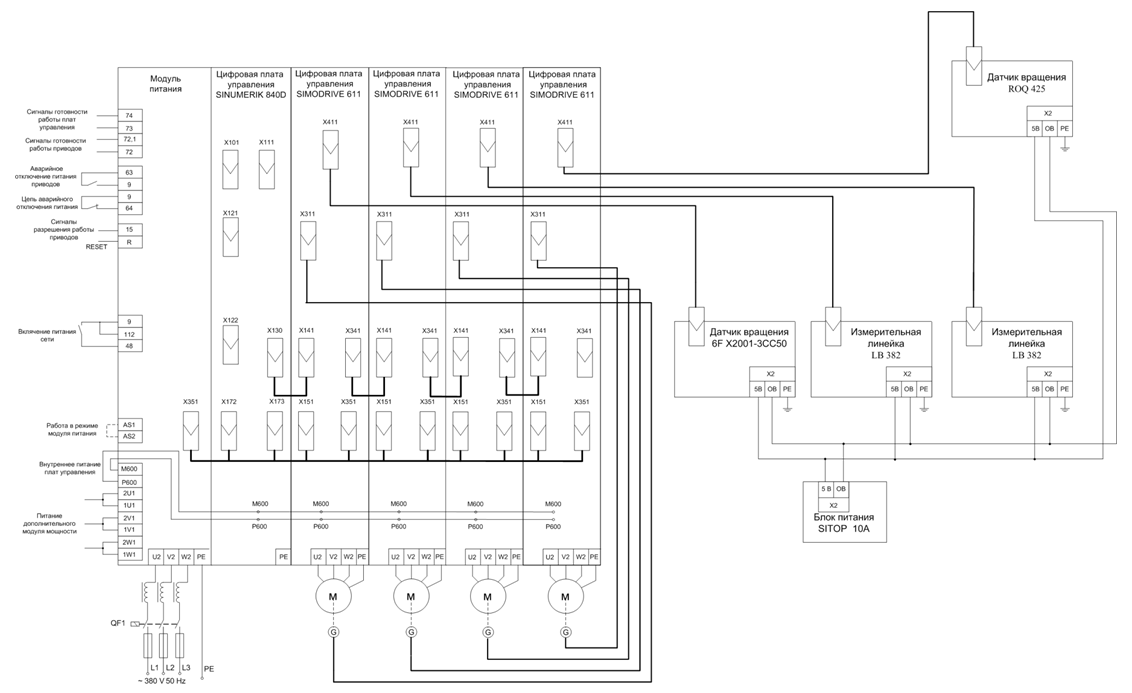
Рисунок 7.15 – Приводная система SINUMERIK 840D для фрезерного станка с ЧПУ