

2.3 Система чпу и объект управления как функциональный автомат
Функциональный автомат (ФА) представляет собой совокупность управляющего автомата (УА) и операционного автомата (ОА). Структурная схема функционального автомата представлена на рисунке 2.4.
Входные сигналы управления ФА представляют собой входной код, выходные сигналы ФА - выходной код. Функциональный автомат, таким образом, осуществляет преобразование одного кода в другой код, т.е. трансляцию.
Рисунок 2.4 - Структурная схема функционального автомата
Трансляция может быть организована двумя типами процессов: компиляцией, когда вся информация вводится, осмысливается и превращается в другой язык (как перевод текста), или интерпретацией, когда перевод на другой язык осуществляется порциями (фразами) в меру поступления информации. В цифровых системах управления применяется интерпретация.
Структура интерпретатора показана на рисунке 2.5.
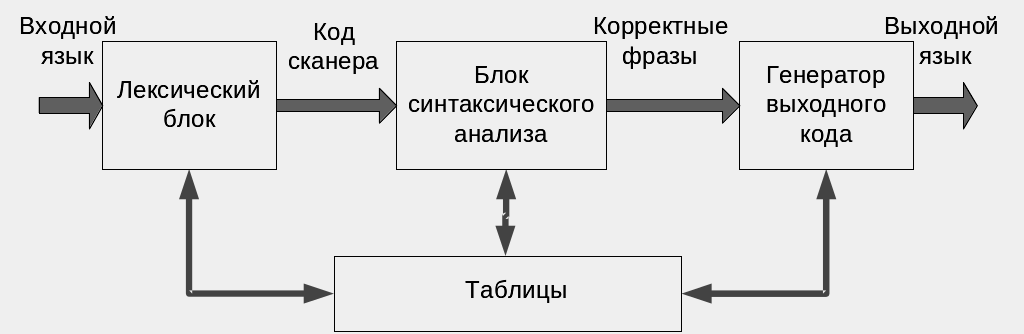
Рисунок 2.5 - Структурная схема интерпретатора
Управляющая программа автомата, написанная на некотором входном языке, сканируется с целью определения принадлежности лексических переменных (лексем), которые вводятся в систему, принятому в данной системе алфавиту. Все допустимые во введенной программе символы упаковываются в специальные таблицы и обеспечиваются соответствующим адресом - кодом сканера.
Код сканера позволяет восстановить или распределить введенную информацию при проведении синтаксического анализа, когда определяется правильность структуры кадра, а также при проведении семантического анализа, когда определяется содержание задачи. Сформированные при этом корректные фразы поступают на генератор выходного кода, который формирует с помощью операционного автомата сигналы управления объектом.
2.4 Языки программирования и управление систем чпу
В системах ЧПУ используются три языка:
язык задач - кнопки, переключатели и регуляторы пульта оператора;
язык заданий - стандартная система кодирования ISO-7bit управляющей программы;
язык дисплея - сообщения, которые выдаются оператору (тексты, графики, цифры, символы и т.п.).
Язык задач пульта оператора и язык дисплея (человеко-машинный интерфейс) должны обеспечить запуск и останов системы, выбор режима работы, оперативное управление, отображение состояния процесса. Все клавиши должны иметь прямую или условную пометку, а также индикацию включения.
Язык заданий – это символы и построенные из них фразы, используемые для автоматического управления по программе. Символы имеют определенное значение (ГОСТ 20999-83), программа должна иметь название, а также содержать обозначение начала и конца. Структурно она делится на главы (:) и кадры (N).
Функции ЧПУ разделяются на стандартные, технологические, геометрические и знаков. Символы, буквы и цифры, которые образуют конкретную функцию, называются терминалами языка. Все терминалы делятся на шесть классов:
Стандартные функции (SF): G, M.
Цифры (DIGIT): 0..9.
Технологические функции (TECHNF): N, F, S, T, L, H, %, LF, / (N - номер кадра, F - функция подачи, S - функция скорости привода главного движения, T - функция позиции инструмента, % - начало программы, LF - конец кадра).
Геометрические функции (GEOMF): [X, Y, Z] - первичные координаты, [I, J, K] - координаты начала движения, [P,Q] - вторичные координаты, [U,V,W] - третичные координаты, [A,B,C] - угловые координаты.
Функции знака (DEL): + , - .
Функция параметра (PARAM) R, что используется для упрощения вычислений при программировании.
Отдельные фразы входного языка представляют собой команды управления. Однако их набор может быть противоречивым, неверным или неполным. С этой целью проводится синтаксический и семантический анализ.
Правила написания слов и предложений определяются грамматикой входного языка. В цифровых системах управления применяются автоматная и контекстно-свободная грамматика. Автоматная грамматика предусматривает жесткие правила написания программы. В контекстно-свободной грамматике допустима некоторая свобода в последовательности слов или их размерности. Например, функция подачи F может не содержать незначимых цифр и запятая может стоять на любом месте, например, F0,25; F1250; F1,2 и т.д.
Правила грамматики удобно представлять в виде синтаксических диаграмм, примеры которых приведены на рисунке 2.6.
Синтаксические
диаграммы имеют вход (левая вертикаль)
и выход (правая вертикаль). Между ними
располагаются допустимые цепочки
терминалов (в кружках) и состояний
(в прямоугольниках). Синтаксические
диаграммы показывают варианты
представления функций. Например, в
функции «Подача» должны быть терминал
F, терминал запятая (![]() )
и одна, две или три цифры. Для выхода из
процесса анализа необходима также
команда SIMBLE.
)
и одна, две или три цифры. Для выхода из
процесса анализа необходима также
команда SIMBLE.
Рисунок 2.6 - Пример синтаксической диаграммы
Переходы в новые состояния должны отличаться терминалами. Так, например, из состояния анализа терминала F есть два выхода: на ввод цифры или на ввод запятой.
Представим синтаксис слова «Подача» графом (рис. 2.7).
Рисунок 2.7 - Граф автомата для функции “Подача”
От графа перейдем к составлению правил автоматной грамматики, которые записываются в виде:
![]() ,
,
где
![]() – корень правила, нетерминал, который
обозначает текущее состояние автомата;
– корень правила, нетерминал, который
обозначает текущее состояние автомата;![]() – терминал, один;
– терминал, один;
![]() – нетерминал, состояние, в которое
переходит автомат;
– нетерминал, состояние, в которое
переходит автомат;
![]() – сигнал {zi}, который
генерируется автоматом в новом состоянии
(не обязателен).
– сигнал {zi}, который
генерируется автоматом в новом состоянии
(не обязателен).
Для графа на рисунке 2.7 правила автоматной грамматики принимают следующий вид:
![]()
Составленные правила позволяют разработать программу автомата.
Сигналу z можно назначить различные значения, например, z=1 – ДОПУСТИТЬ; z=0 – ОТВЕРГНУТЬ.
Алгоритм управления приведен в управляющей таблице (табл. 2.1).
В управляющей таблице автомата строки описывают варианты его обращения в определенных состояниях, а столбцы - условия переходов с одного состояния в другое.
Правильность составления таблицы оценивается следующим образом:
количество правил равняется количеству заполненных клеток таблицы;
незаполненные клетки отвечают операции «ОТВЕРГНУТЬ»;
количество строк отвечает числу состояний, а количество столбцов - числу терминалов.
Таблица 2.1 - Алгоритм управления автоматом
Состояние |
Терминал |
|||
F |
DIG |
|
Команда SIMBLE |
|
|
Заменить
|
|
|
|
|
|
Заменить
сдвинуть |
Заменить a4 сдвинуть |
|
|
|
Заменить
сдвинуть |
Заменить
|
|
|
|
|
Заменить
|
|
|
|
Заменить
|
|
|
|
|
|
|
Заменить сдвинуть |