

Зміст
1. Триосний автогрейдер ………………………………………………………..
2. Дослідження механічної передачі системи приводу виконавчого органа машини……………………………………………………………………………
Література…………………………………………………………………………
Триосний автогрейдер (Патент ru 2200799)
Триосний автогрейдер відноситься до землерийно- транспортних машин і призначений для планування грунту при будівництві та ремонті доріг , а також для швидкісного очищення доріг , площ і аеродромів від снігу. Триос-ний автогрейдер містить тягач , що має дві задні провідні осі зі встановлюни-ми на них колесами , і пов'язану з ним хребтовую балку з передньою підтри-муючою віссю , на якій встановлені колеса. Колеса на задніх провідних осях виконані керованими. Хребтова балка балансирами з'єднана з тягачем , а передні підтримуючі колеса виконані вільно повертаючими . Одна із задніх ведучих осей тягача і передня підтримуюча вісь встановлені на поперечно хитаючих осях . Підвищуються плануюча здатність і продуктивність автог-рейдера .
Винахід відноситься до землерийно- транспортної техніки і може використовуватися при будівництві доріг.
Автогрейдер - самохідна колісна машина для швидкого і акуратного про-філювання грунту при ремонті , розширенні та будівництві доріг. У зимовий період автогрейдер використовується для швидкісного очищення доріг , площ і аеродромів від снігу.
Метою винаходу є спрощення системи маневрування для зниження вартості автогрейдера при підвищенні продуктивності і збереженні експлуатаційних можливостей , підвищення плануючої здібності.
Зазначена мета досягається компонуванням автогрейдера передньою віссю з вільно повертати, рояльними встановленими колесами і маневруванням колесами задніх провідних керованих осей , що дозволяють автогрейдера і повертати, і здійснювати хід " крабом " , тобто зберігати експлуатаційні можливості .
Підвищення продуктивності відбувається за рахунок збільшення тягового зусилля , що дозволяє збільшити глибину різання , що збільшує виїмку вирізуваного грунту в одиницю часу.
Заявники зазначають, що в пропонованому автогрейдері відбувся перерозподіл мас . Збільшено навантаження на задні провідні керовані осі і зменшена на передню , підтримуючу вісь. Оскільки навантаження на керовані осі збільшилася , покращилася і керованість автогрейдером , особливо при робочому процесі профілювання дороги. Справді , відвал заглиблюється в грунт , розвантажуючи передню вісь , але оскільки вона тільки підтримуюча , з вільно повертаються рояльними колесами , то її розвантаження не робить впливу на керованість автогрейдером .
Рис. 1. Триосний автогрейдер
Уявімо , що порівнюваний і пропонований автогрейдер мають однаковою експлуатаційною масою G при однаковому коефіцієнті зчеплення коліс з дорогою. Відомо , що тягове зусилля на ведучих колесах автогрейдера P = Gсц ( див. " Довідник конструктора дорожніх машин" . - М.: " Машинобудування " , 1973, с. 208 ) , де Gсц - сцепная експлуатаційна маса, рівна в порівнюваних автогрейдері Gсц = 0,7 G , а в пропонованому автогрейдері може бути найменшою і складати , конструктивно , не більше 15 відсотків експлуатаційної маси.
Тоді Gсц = 0,85 G.
Слід зазначити , що в порівнюваних автогрейдері маса , яка припадає на передню керовану вісь , не може бути зменшена через погіршення керова-ності автогрейдером на швидкісному транспортному ходу , коли візку або шарнірно зчленованій рамі повертатися не допускається.
Тоді тягове зусилля для порівнюваного автогрейдера складе P = Gсц = 0,7 G , а для пропонованого P = Gсц = 0,85 G , тобто у пропонова-ному автогрейдері тягове зусилля вище на 15 відсотків.
Заявники зазначають, що в пропонованому автогрейдері відбувся перерозподіл мас . Збільшено навантаження на задні провідні керовані осі і зменшена на передню , підтримуючу вісь. Оскільки навантаження на керо-вані осі збільшилася , покращилася і керованість автогрейдером , особливо при робочому процесі профілювання дороги. Справді , відвал заглиблюється в грунт , розвантажуючи передню вісь , але оскільки вона тільки підтримуюча , з вільно повертаються рояльними колесами , то її розванта-
Рис. 2. Триосний автогрейдер
ження не робить впливу на керованість автогрейдером .
Цей транспортний засіб має всі керовані колеса.
Однак маневрування може бути простіше і дешевше , якщо передня вісь тривісного автогрейдера буде підтримуючої , з вільно повертаються рояльними колесами.
Така властивість у розглянутого вище транспортного засобу відсутня . Суть пропонованого винаходу пояснюється кресленнями , де на фіг.1 зображена схема зовнішнього вигляду автогрейдера збоку , на Фіг.2 - схема зовнішнього вигляду автогрейдера в плані , на Фіг.3 - схема повороту автогрейдера , на фіг.4 - схема ходу " крабом " і на фіг.5 - схема заднього ходу.
Автогрейдер складається з двовісного тягача 1 з провідними й керованими осями 2 і 3 , причому вісь 3 може поперечно гойдатися навколо осі 4 , що дозволяє тягачу завжди спиратися всіма колесами на грунт.
Тягач 1 поперечною віссю 5 з'єднаний з хребтової балкою 6 з встановленим під нею робочим обладнанням 7 . Спереду до хребтової балці 6 віссю 8 закріплена передня вісь 9 з підтримуючими , вільно повертати , рояльними встановленими колесами 11 на осях 10 . Повертає автогрейдер поворотом керованих коліс провідних осей 2 і 3 в різні сторони. Поворот коліс осей 2 і 3 в різні сторони викликає поворот коліс 11 передньої підтримуючої осі 9 і всього автогрейдера . Хід " крабом " автогрейдер здійснює поворотом керованих коліс провідних осей 2 і 3 в одну сторону. Колеса 11 передньої підтримуючої осі повернуться , автогрейдер піде " крабом " .
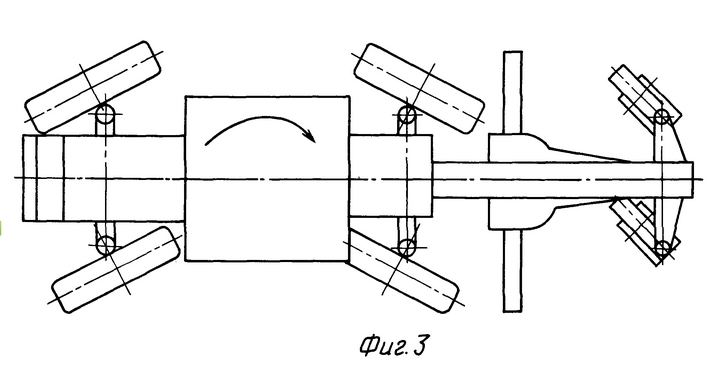
Рис. 3. Триосний автогрейдер
При реверсі колеса 11 осі 9 повернуться на 180o навколо осей 10 в будь-яку сторону , що не приведе до зміни обраного напрямку руху автогрейдера Заявники , зокрема, вважають , що збільшення навантаження ( у відсотковому відношенні від загальної маси ) машини на задні керовані осі і деяка розвантаження передньої осі при копанні грунту дозволяють не робити автогрейдер з передньою провідною керованої віссю (див. ГОСТ 27535-87 ( ІСО 7134 -85 ) , с. 5 , рис . 14 ) , що і складно , і дорого.
Достоїнствами пропонованого автогрейдера заявники вважають поєднання двох задніх керованих провідних осей спільно з підтримуючими , вільно повертати , рояльними встановленими колесами передньої осі , що дозво-ляють зберегти автогрейдера всі експлуатаційні можливості , підвищити його продуктивність , знизити його вартість і поліпшити плануюче здатність , зав-дяки підвісці однієї задньої і передньої осі на поперечно хитних осях .
Рис. 4. Триосний автогрейдер
Формула винаходу
Триосний автогрейдер , що містить тягач , що має дві задні провідні осі зі встановленими на них колесами , і пов'язану з ним хребтовую балку з передньої підтримуючої віссю , на якій встановлені колеса , що б тим , що колеса на задніх провідних осях виконані керованими , при цьому хребтовая балка балансирними з'єднана з тягачем , а колеса на передній , підтримуючої осі виконані вільно повертаються , причому одна з задніх ведучих осей тягача і передня підтримуюча вісь встановлені на поперечно хитних осях .
Технічне завдання
Тема:«Дослідження механічної передачі системи приводу виконавчого органа машини»
Схема приводу
М. П.



Д.
Д. – двигун: потужність N =7, 5 кВт; частота обертів вала n = 750 хвл.-1
M. П. – механічна передача: мультиплікатор целиндричний одноступінчатий
шевроний
В. О. М. – виконавчий орган машини.
Загальний вигляд механічної передачі