

3. Манипуляторлардың динамикасы
Қазiргi өндiрiстiк роботтарын манипулятор серпiмдi инерция буындарымен белсендi көп түйiндi кеңiстiктiк механизмдары болады және құрылымның айнымалысынан күрделi қозғалыс тiзбек.
Құрылымын айнымалысы астында ажыратылған қозғалыс тiзбек, жұмысшы мүше қашан кеңiстiкте мүмкiн еркiн жылысуға түсiнедi, және тұйық кинематикалық тiзбек, жұмысшы мүше қашан жылжымайтын негiздеуге арқа сүйейдi. Мысалы, екiншi нұсқа құрастыру, түйiспелi нүктелiк пiсiру, бұрғылауды әр түрлi технологиялық операцияларды орындау кезде көрiнiп қалады және оны тағы басқалардай қарамаймыз.
Екi
звенолы
манипулятордың
(ажыратылған ) тұтқалы құрастыруын нақты
сұлбасы 3.1
суретте
келтірілген.
Сұлбада серпiмдi буындар шартты көрсеткен
![]() ,
айналмалы буларда люфттар
,
айналмалы буларда люфттар
![]() ,
бәсеңдейтiн буындар f1,
f2,
тетiк инерция мезетi барлығы әкелiнген
елiктейтiн үйкелiстер Jм,
келтірілген
буындарды тұрақты массалар m1,m2
айнымалы масса,m3,
қармауда
табатын заттың массасын дәл келтiредi.
Бұл масса жағдай әйтеуiр 0ден
mmax дейiн
шегiнде мүмкiн айырбастау,
,
бәсеңдейтiн буындар f1,
f2,
тетiк инерция мезетi барлығы әкелiнген
елiктейтiн үйкелiстер Jм,
келтірілген
буындарды тұрақты массалар m1,m2
айнымалы масса,m3,
қармауда
табатын заттың массасын дәл келтiредi.
Бұл масса жағдай әйтеуiр 0ден
mmax дейiн
шегiнде мүмкiн айырбастау,
мұндағы mmax- төлқұжат жүк көтергiштiгi әр робот үшiн көрcетiлген.
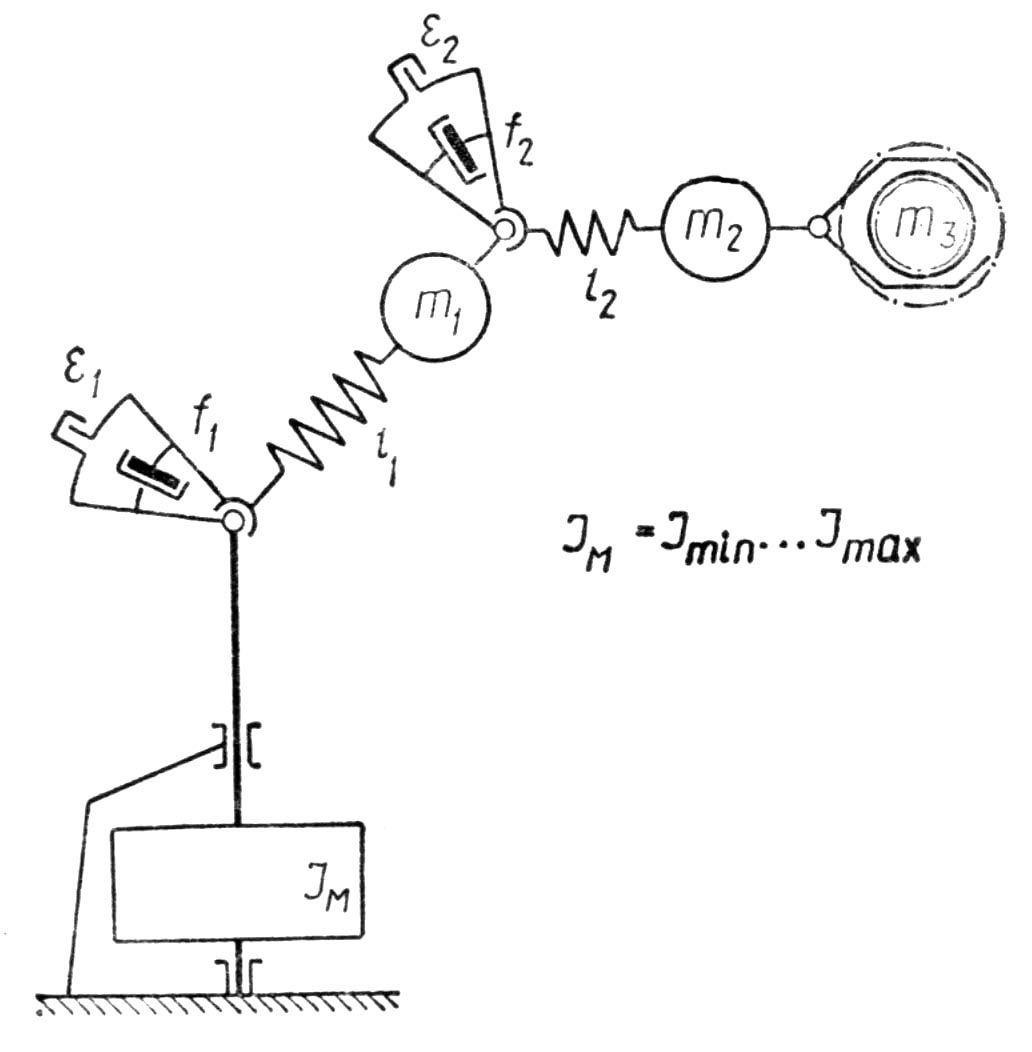
Сурет 3.1. Тұтқалы құрастыруды екi звенолы манипуляторының сұлбасы.
Мұндай күрделi жүйенi серпiннiң зерттеуi болса-болар аналитикалық қазiргi уақытта өзiн таныстырма шектеулердi қатар сондықтан енгiзiледi. Ендiгәрi манипуляторлары тұратыны жұп люфт кинематиялық бiрлескен абсолюттi қатты буындарды сияқты қаралады және саңылау, мiнсiз сипаттамалармен қозғалтқыш қозғалыста алып келетiн үйкелiссiз.
Бұл шектеулер диссипаны енгiзу жолымен сыдырыла алады - функцияларды тивныхтан теңдеуге кейбiрi, сонымен бiрге өзгерудiң потенциалдық эгергияның сөздерi. Сипаттама мұндай күрделi тәсiлден астам нағыз оқу құралы шектен шығады.
Манипулятордың басқарылатын қозғалысын серпiнiн пiшiндеу басқару құрылғыларының жобалауы үшiн бастапқы материалымен мүмкiн қызмет етсiн және негiзгi динамикалық сипаттамалар олардың синтезi. Басқарудың сапасы манипуляторлардың сипаттамаларын қызмет етудiң процесiнде есептеу, сонымен бiрге талап етiлетiн дәлдiкпен берiлген қозғалыс заңды жүзеге асыруға жоғарылатуға мүмкiндiк бередi.
Екi негiзгi есептер осыған байланысты құрастырады: 1) тетiктiң массоинерция сипаттамаларының деп аталатын тиiмдi инерция мезеттерi, болып табылатындарын есептеу; 2) мүшеленулердегi буындарын айналу оларында жетектердiң қозғалтқыштарының сәттерiн анықтама айналмалы түрiндегi және сызықты ауысумен мүшеленулердегi қозғалтқыштардың күштерi. Бұл мiндеттер манипулятордың жобалауы кезең сияқты ұйғарылады, сол сияқты оларғасының көмегiмен басқарушы құрылқ басқаруына кезеңде.
Манипуляторлары негiзiнен динамика есеп олардың анықтамасы үшiн тиiмдi алгоритмдарын әзiрлеуi негiзгi статикалық болып көрiнедi және динамикалық сипаттамалар, (күштердi табылу және берiлген қозғалыс заң бойымен сәт және жағдайға) манипуляторлардың серпiнiн тура есептiң Решивi қозғалтқыштарды қисынды есептеудi орындасын және басқару құрылғылары, сонымен бiрге роботтардың механикасының басқа мiндеттерi шешу.
Серпiн керi есепке құрастырудың сұрақтарын жатады және тетiктердi динамика теңдеулердi интегралдау тапсырмада (күш және сәттер) сыртқы басқарушы әсер. Бұл мұндай дәлдiк, тезәрекеттiк, орнықтылық манипуляторлардың сипаттамаларын анықтауға рұқсат бередi, және тағы басқалар.
Манипулятордың механикалық жүйенiң серпiнiн әр түрлi тәсiлдермен сипаттауға болады, қағидат Д қолдануымен сан том.Аламбер, Гаустың ең кiшi мәжбүрлеуiн қағидат, сонымен бiрге голономды байланыс шеңберiнде - ТЖ руды Лагранждың теңдеулерiнiң әдiсiмен. Қарым-қатынас бұл әдiс көпшiлiгiнде басқа әдiстермен манипуляторлардың серпiнiн сипаттамада салыстырғанда артықшылықты алады.
Манипулятор динамика теңдеу. Жалпыланған күш, қолданыстағы манипуляторының буындарына есептеп шығарамыз және онысы тиiстi жалпыланған координата. Мұндай координаталардың сапасында буындардың салыстырмалы бұрылыстарын мүшеленулердi жағдайда бұрыш айналмалы түрiндегi таңдайды және мүшеленулердi жағдайда сызықты ауысулар iлгерлемелi түрiнде.
Мысалы: Сурет . 3.2 негiзгi жылжымалы манипулятор үшiн тиiмдi инерция мезеттерiнiң есептеуiн сұлбаны қарап шығамыз. Манипулятор жетi буындардан тұрады. Буындардың арасындағы байланыс орнатылған басқарушы қозғалтқыш бiлiктi топсалардың көмегiмен жүзеге асырылады. Манипулятор қолдың қозғалысы мүмкiн дәл келтiру, өйткенi қунақылық жетi оның дәрежелерi қасиет иық, шынтақты бейнелеп көрсетедi және қол буындарын. Мұндай манипулятор сондықтан адам пiшiндi депте атауға болады
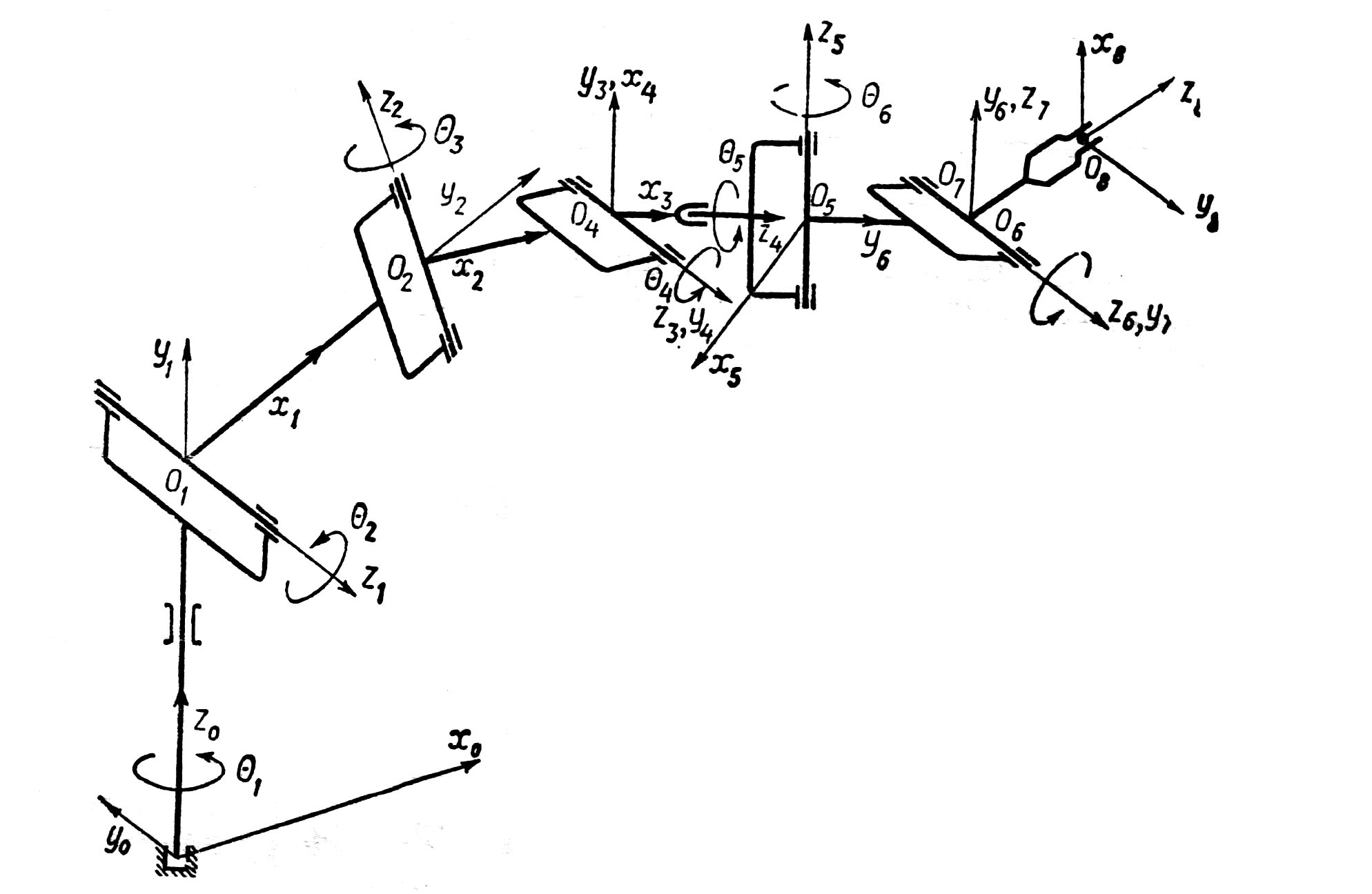
Сурет 3.2. Жетi звенолы манипуляторлардың кинематикалық сұлбасы