

9.2.3. Управление технологическим процессом в номинальном режиме
Если в блоке диагностики не выявлено тех или иных нарушений в работе КТС, оборудования или функционирования ТП, а также установлена готовность АТК к автоматизированному управлению, то управление передается в блоки статической оптимизации и динамической стабилизации.
В блоке оптимизации осуществляется поиск наиболее выгодного режима функционирования ТП, удовлетворяющего всем технологическим ограничениям. В блоке стабилизации вырабатываются управляющие воздействия на материальные и энергетические потоки, направленные на поддержание характеристик ТП на уровне оптимальных режимных значений.
В двух указанных блоках осуществляются наиболее сложные математические расчеты, основанные на использовании заранее построенных математических моделей ТП. Такие модели позволяют спрогнозировать поведение ТП при реализации различных управляющих воздействий. Благодаря этому при обнаружении в блоке контроля отклонений характеристик ТП от номинала такие модели позволяют рассчитать управляющие воздействия, которые должны вернуть ТП в требуемое состояние (эти воздействия передаются в блоки НЦУ).
Технолог-оператор имеет возможность вводить в блоки оптимизации и стабилизации уставки и данные для расчетов, которые нельзя получить с помощью датчиков аналоговой или дискретной информации (напр., химический состав сырьевых компонентов или теплотворная способность топлива).
9.2.4. Ситуационное управление
Функционирование АСУ ТП в случае тех или иных нарушений определяется блоком ситуационного управления. В зависимости от типа ситуации, который должен быть выявлен в блоке диагностики, производятся:
корректировка структуры управления в режимах оптимизации и (или) стабилизации (например, может быть снят с управления блок оптимизации; отключены некоторые контуры стабилизации; изменены настройки соответствующих алгоритмов управления);
переход к алгоритмам управления, имитирующим логику управления опытных операторов в сходных ситуациях;
отказ от НЦУ и переход к управлению в режиме совета оператору.
9.2.5. Представление информации оператору
Информация о состоянии ТП может представляться оператору системы в виде текстов, таблиц, графиков, рисунков. В состав ПО ОСУ ТП могут включаться программы:
вывода экстренных сообщений на печать, экран дисплея, табло, мнемосхему;
периодического вывода текущей информации на печать или экран дисплея;
печати сменных и суточных рапортов, сводок, таблиц основных показателей;
вывода отдельных показателей по запросу оператора.
9.3. Комплекс технических средств асу тп
Для реализации функций АСУ ТП требуются весьма разнообразные устройства, обеспечивающие текущий контроль за ходом технологического процесса, переработку получаемой информации, формирование и выполнение управляющих воздействий. В основу используемых технических средств заложены принципы стандартизации и унификации входных и выходных сигналов, позволяющие просто согласовывать между собой различные приборы и устройства.
По своему назначению устройства, образующие комплекс технических средств (КТС) АСУ ТП, могут быть разделены на три основные группы: первичные измерительные преобразователи, устройства контроля и регулирования и исполнительные устройства. Взаимодействие названных групп устройств в составе АСУ ТП схематично показано на рис. 9.2. Рассмотрим далее каждую из групп устройств КТС в отдельности.
1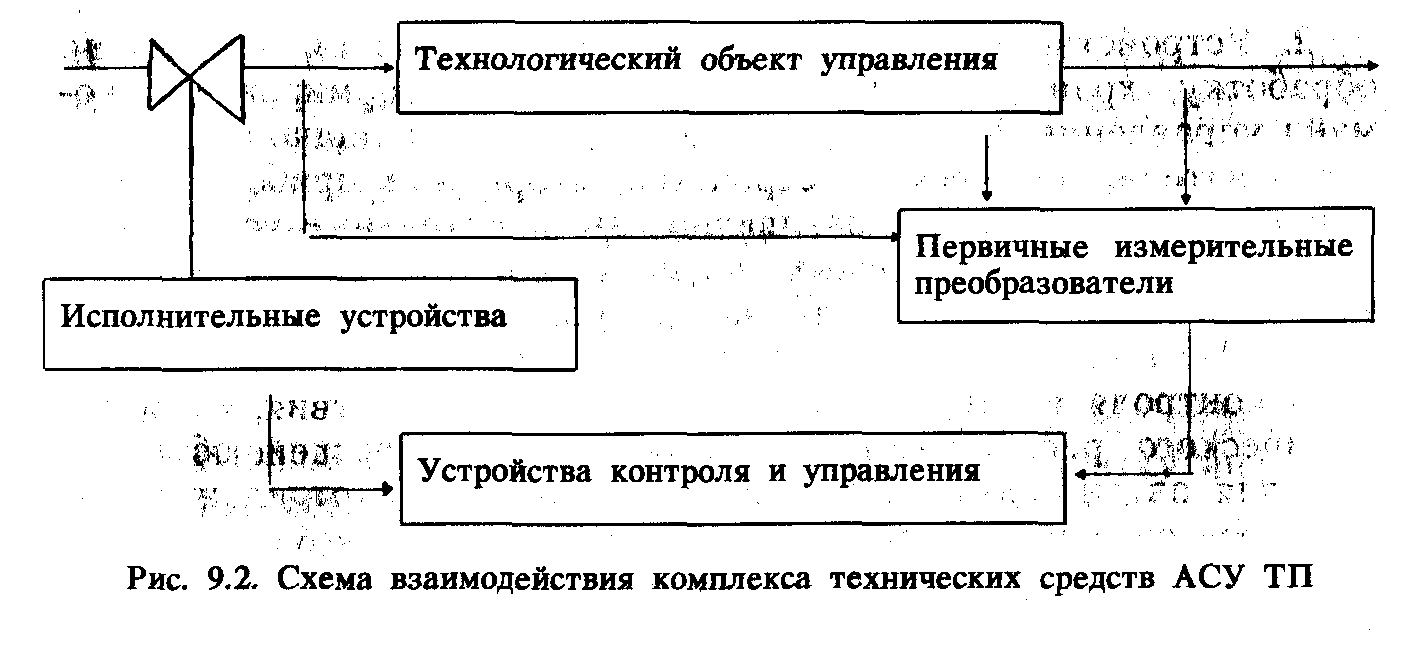 .
Первичные измерительные преобразователи
необходимы для получения информации о
состоянии ТП. К этой группе относятся
первичные измерительные преобразователи
(датчики), нормирующие преобразователи,
формирующие унифицированные электрические
или пневматические сигналы, и другие
средства измерения, дающие текущую
информацию о контролируемых физических
величинах.
.
Первичные измерительные преобразователи
необходимы для получения информации о
состоянии ТП. К этой группе относятся
первичные измерительные преобразователи
(датчики), нормирующие преобразователи,
формирующие унифицированные электрические
или пневматические сигналы, и другие
средства измерения, дающие текущую
информацию о контролируемых физических
величинах.
Наряду с унифицированными электрическими сигналами, из которых наиболее распространены сигналы постоянного тока 0— 5, 0—20 и 4—20 мА, постоянного напряжения 0—10 В, частоты 4—8 и 2—4 кГц, и пневматическими сигналами величиной 0,02— 0,1 МПа, иногда используются непосредственно сигналы первичных преобразователей: термометров сопротивления, термопар, дифференциально-трансформаторных датчиков.
2. Устройства контроля и управления осуществляют прием, обработку, хранение, выдачу информации и формирование команд управления. К этой группе относятся функциональные преобразователи, логические устройства, вторичные приборы, регулирующие комплексы, управляющие вычислительные устройства.
По сложности решаемых задач устройства данной группы можно условно подразделить на три уровня.
а) Нижний уровень предназначен для реализации простых схем контроля и регулирования, т. е. для создания систем автоматического регулирования простых технологических объектов или для автономного контроля и регулирования отдельных параметров сложных объектов. К функциям, выполняемым устройствами нижнего уровня, относятся индикация и регистрация контролируемых параметров, сигнализация о достижении переменными заданного уровня, позиционное и одноконтурное регулирование. В состав устройств данного уровня входят нормирующие преобразователи и вторичные приборы — вольтметры, логометры, потенциометры, автоматические мосты.
Нормирующие усилители или преобразователи, принимая слабые электрические сигналы с выходных устройств первичных измерительных преобразователей, трансформируют их в унифицированный сигнал постоянного тока или напряжения. Использование нормирующих преобразователей в схемах управления с большим числом контролируемых параметров требует значительных затрат на их приобретение и обслуживание, поэтому наблюдается тенденция к применению первичных измерительных преобразователей с унифицированным входом.
Вторичные приборы служат для измерения и регистрации сигналов первичных преобразователей. Автоматические потенциометры и мосты выпускаются в различных конструктивных вариантах: с прямолинейной или круговой шкалой, с ленточной или дисковой диаграммой. Иногда в них встраиваются функциональные преобразователи выходных унифицированных сигналов или устройства для позиционного регулирования. Применяются также приборы с регулирующими устройствами для программного управления, а также с устройствами сигнализации.
б) Средний уровень служит для осуществления функций централизованного контроля ряда переменных и построения на этой основе систем автономного или многосвязного автоматического регулирования ТП на основе стандартных линейных законов управления, нелинейных статических преобразований и логических процедур. Для реализации указанных функций разработаны различные регулирующие комплексы. Они, как правило, включают измерительные блоки, осуществляющие прием сигналов первичных преобразователей, усилительные блоки, блоки нелинейных алгебраических и логических преобразований, блоки, реализующие стандартные линейные законы регулирования (П — пропорциональный, ПИ — пропорционально-интегральный, ПИД — пропорционально-интегрально-дифференциальный), а также схемы двух- или трехпозиционного регулирования, блоки сигнализации и индикации показаний приборов. Основной элементной базой регулирующих комплексов служат интегральные микросхемы, что позволяет использовать при их конструировании модульный принцип.
в) Верхний уровень реализует сложные алгоритмы управления ТП, включая централизованный контроль и обработку информации, диагностику, ситуационное управление, стабилизацию и оптимизацию режимов технологических процессов, оперативное управление участками производства. Указанные функции осуществляются на основе применения разнообразных средств вычислительной техники, рассмотрению которых будет посвящен специальный раздел книги.
3. Исполнительные устройства реализуют управляющие воздействия на ТП при помощи пусковых устройств и исполнительных механизмов. Они предназначены для изменения регулирующих воздействий в соответствии с величиной сигналов, подаваемых на их вход от устройств регулирования.
Наибольшее распространение имеют электрические исполнительные устройства постоянной скорости.
Пусковые устройства усиливают по мощности управляющие сигналы, поступающие с регулирующего прибора или от оператора при ручном управлении. При использовании электрических исполнительных механизмов постоянной скорости подаваемые на них сигналы представляют собой импульсы с одинаковой амплитудой и скважностью, определяемой величиной управляющего воздействия. Пусковые устройства обеспечивают пуски, реверсы и остановы исполнительных механизмов. Каждый тип пускового устройства сопрягается с определенными исполнительными механизмами и регулирующими устройствами.
Исполнительные механизмы (ИМ) осуществляют управляющие воздействия в соответствии с усиленными сигналами регулирующих устройств. Электрические ИМ состоят из смонтированных в одном корпусе электродвигателей, редукторов, тормозных устройств, преобразователей и указателей положения. В ИМ постоянной скорости используются асинхронные двигатели переменного тока. При больших мощностях применяются трехфазные двигатели с питанием от трехфазной сети. Редукторы необходимы для согласования частоты вращения выходного вала с частотой вращения приводного электродвигателя. Датчики положения служат для организации управления с обратной связью — их сигналы подаются на вход регулирующих устройств и дистанционных показателей положения регулирующих органов.
При выборе ИМ основными критериями являются пусковой и номинальный моменты, а также конструктивные и эксплуатационные параметры. Если ИМ используется в системе автоматического регулирования, то необходимо учитывать его статические и динамические свойства, т. к. они влияют на качество регулирования.