

Міністерство освіти та науки України Національний
педагогічний університет
ім. М.П.Драгоманова кафедра трудового
навчання і креслення Гуменюк Тетяна
Броніславівна
Обладнання швейного виробництва
Лекція № 5
Тема: План:
Теоретичні
основи швейного машинобудування
Механізм голки в швейних машинах.
Механізм передачі руху обертовим човникам.
Механізми ниткопритягувачів швей-них машин.
Механізм переміщення матеріалів.
Взаємодія робочих органів швейної машини та їх технологічне регулю-вання.
Механізм голки в швейних машинах
Голка в швейній машині в більшості випадків має зворотно-поступальний рух, тобто рухається по прямій то в одному, то в другому напрямку. Механізм голки повинен обертовий рух головного вала машини перетворювати в поступальний рух голки.
Для забезпечення правильної взаємодії голки з іншими робочими інструментами машини необхідно, щоб із нижнього положення голка піднімалась як можна скоріше і із човникового пристрою виходила по можливості раніше, а після виходу із матеріалу, який зшивається, переміщувалась повільніше.
Вище перелічені умови краще всього задовольняє кривошипно-шатунний механізм. Цей механізм знайшов широке застосування майже у всіх швейних машинах човникового типу.
Кривошипно-шатунний механізм дуже поширений в машинобудуванні. В швейному машинобудуванні він використовується для перетворення обертового руху головного валу у зворотно-поступальний рух стержня голководія разом із закріпленою в ньому голкою. Довгий стержень голководія круглої форми в перерізі, який ковзить в направляючих втулках, грає роль повзуна.
Для формування уяви про конструкцію кривошипно-шатунного механізму голки та принцип роботи можна розглянути ряд швейних машин незалежно від їх новизни чи устарілості.
Механізм голки машини 4 класу пмз
К

Голководій рухається у двох направляючих втулках 10 із сальниковими ущільнювачами. Голка 12 своєю колбою вставляється до упора в паз на нижньому кінці голководія і закріплюється гвинтом хомутика 11.
Р
Мал. 1
Від зовнішньої цапфи отримує рух механізм ниткопритягувача. Подібний механізм застосовується в закріпковій машині 220-го класу.
Механізм голки машини 22-а класу пмз
Механізм голки швейної машини класу 22-А (мал. 2) має багато спільного з тільки що описаним механізмом машини 4-го класу.
Н

Г
Мал. 2
Додаткове направлення голководія за допомогою ролика на пальці поводка, як це зроблено в машині 4-го класу, тут відсутнє, через що швидко зношуються отвори в головках шатуна 4.
В модернізованих машинах 22-А класу ця направляюча на пальці поводка голководія знову введена (машина 1022-го класу).
Механізм голки машини 252-го класу ПМЗ
Машина 252-го класу – двохголкова, вона дає безпосадкову строчку. Безпосадкова строчка забезпечується тим, що разом із зубчастою рейкою (транспортером тканини) самі голки переміщують матеріал.
На мал. 3 показано конструктивну будову механізма голки машини 252-го класу, звідки видно, що на передньому кінці головного вала, у фронтальній частині рукава, закріплений, як завжди, кривошип 1 голководія.
Шатун 3 верхньою головкою вдягнутий на палець 2 кривошипа: нижня його головка охоплює палець поводка 5, закріпленого стяжним гвинтом на голководію 6. На задньому кінці пальця поводка 5 посажений камінь 4, який переміщується в направляючому пазу коливаючої рамки 7. В кінець голководія ввернутий різьбовий хвостик голкодержака 8 з двома гніздами для встановлення голок. Голки своїми колбами вставляються в гнізда до упора і міцно закріплюються стопорними гвинтами 9.
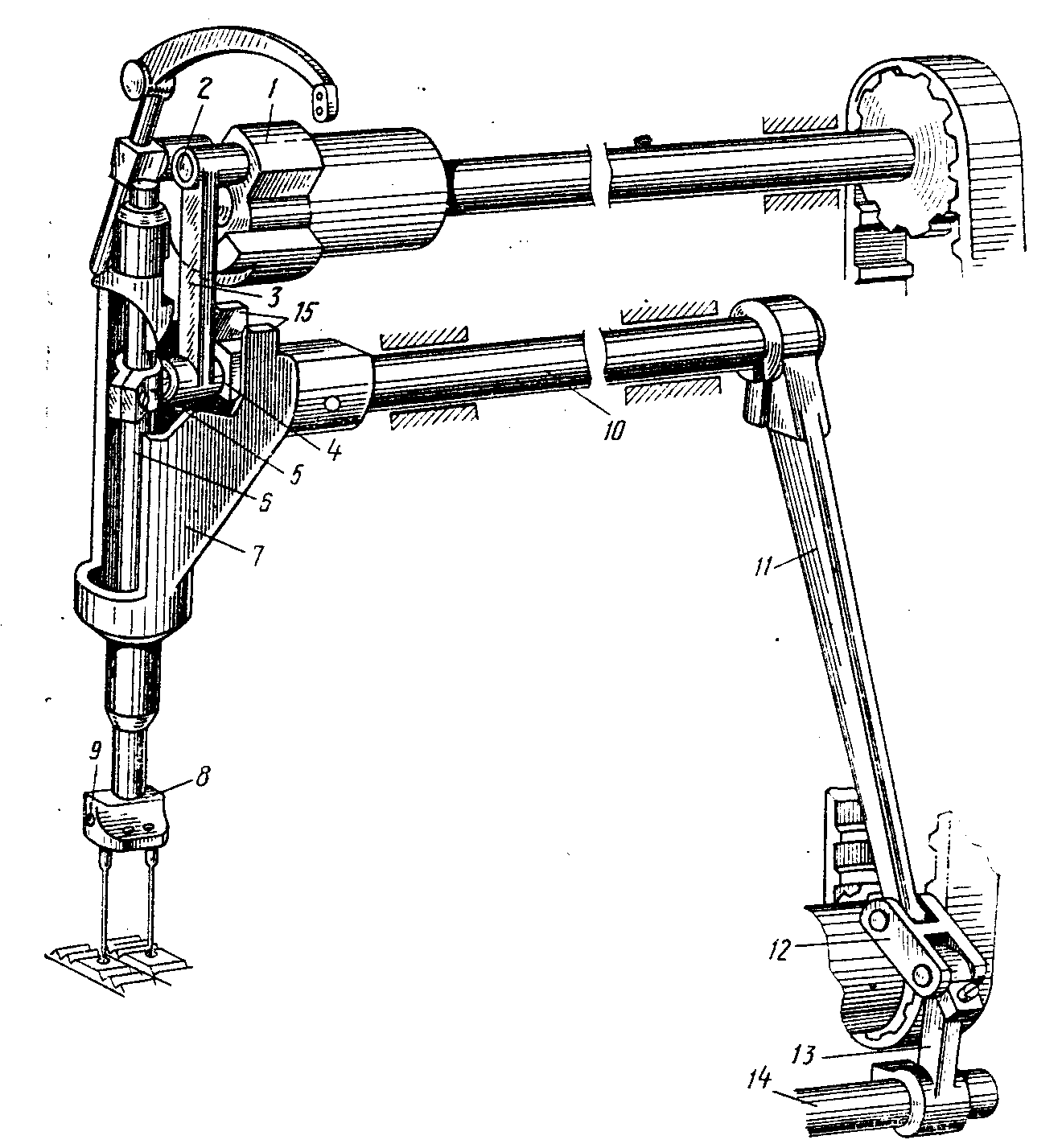
Мал. 3
Через кривошип 1 і шатун 3 голководій разом з голками отримує основний зворотно-поступальний рух. Але так як голководій змонтований в рамці 7, яка закріплена на валу 10 і коливається разом з валом, то разом з рамкою голководій і голки здійснюють рух вздовж лінії строчки. З кінематичної точки зору механізм коливання рамки представляє собою звичайний кулісний механізм, в якому коливальна рамка 7 з направляючим пазом 15 для камня 4 є кулісою. Рух рамці разом з валом 10 подається від вала 14 прдовжнього переміщення рейки (вала подачі) через шатун 13, з’єднувальну ланку 12 і коромисло 11.
Розміри ланок цього складного ланцюга підібрані таким чином, щоб продовжнє переміщення рейки і переміщення (коливання) рамки разом з голками вздовж лінії строчки були однакові. На базі двохголкової машини 252-го класу створені машини 262, 352, 362, 462-го класів. Цей механізм голок застосовується і в машині 652 класу.