

2. Зміст роботи
2. 1. Розрахунок динамічних характеристик ланки другого порядку за допомогою Mathcad.
2.2. Побудова графіків динамічних характеристик коливальної ланки.
3. Запис математичної моделі коливальної ланки
Прикладом
ланки другого порядку є електричне коло
електродвигуна із врахуванням маси
якоря.
Досліджуємо
електродвигун постійного струму з
незалежним збудженням з регулюванням
по колу якоря рис.1. Вхідна величина Uвх
–
напруга на якорі , вихідна – частота
обертання вала якоря ω. Параметри обмотки
якоря
 ,
ом; Lя,
Гн. Робота електродвигуна в перехідному
процесі описується основним рівнянням
динаміки
,
ом; Lя,
Гн. Робота електродвигуна в перехідному
процесі описується основним рівнянням
динаміки
 (17)
(17)
та рівняння електричної рівноваги в колі якоря
 (18)
(18)
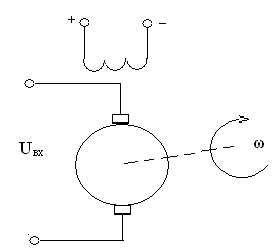
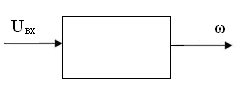
Рис.1. Принципова та функціональна схеми ланки "електричний двигун"
де J –момент інерції якоря;
𝜔- частота обертання вала якоря;
Mд – обертовий момент двигуна;
Mо – момент опору на валу двигуна;
 -
вхідна напруга, прикладена до якоря;
-
вхідна напруга, прикладена до якоря;
 −
е.р.с. обмотки якоря;
−
е.р.с. обмотки якоря;
rя – активний опір кола якоря (включаючи і опір джерела живлення U);
Lя − індуктивність кола якоря .
Так як двигун має незалежне постійне збудження і постійний магнітний потік Ф= соnst, то пропорційна частоті обертання 𝜔.
= С𝜔 𝜔, (19)
де С𝜔 = С∙Ф − конструктивна постійна;
Ф – магнітний потік головних полюсів.
Підставимо значення в рівняння (19), одержимо:
 (20)
(20)
Рушійний момент двигуна визначається з виразу
Мд= СмiяФ. (21)
Момент опору умовно можна виразити через струм iс, що відповідає моменту опору:
Мо= СмiсФ, (22)
де
См
=
 -
конструктивна постійна. Підставляючи
(21)
і (22)
в (17)
одержуємо
-
конструктивна постійна. Підставляючи
(21)
і (22)
в (17)
одержуємо
 (23)
(23)
Знаходимо з цього рівняння значення струму якоря і його похідної
 ;
;
 (24)
(24)
і підставимо їх в рівняння (20),одержимо
 (25)
(25)
Розділимо
все рівняння на
 ,
помножимо і розділимо перший член лівої
частини на rя,
одержимо:
,
помножимо і розділимо перший член лівої
частини на rя,
одержимо:
 (26)
(26)
Введемо наступні позначення:

 -
електромеханічна постійна часу двигуна,
сек.;
(27)
-
електромеханічна постійна часу двигуна,
сек.;
(27)
 -
електромагнітна
постійна
часу кола якоря двигуна, сек;
(28)
-
електромагнітна
постійна
часу кола якоря двигуна, сек;
(28)
 -коефіцієнт
підсилення двигуна.
(29)
-коефіцієнт
підсилення двигуна.
(29)
Введемо
позначення
 ;
;
Після підстановки вказаних позначень отримаємо диференційне рівняння
 (30)
(30)
Якщо
двигун працює вхолосту, то

 (31)
(31)
Коефіцієнт згасання знаходимо з (30)
𝜉= (32
)
(32
)
В
операторній формі рівняння двигуна
набуває вигляд

Характеристичне
рівняння ланки
 .
.
Корені характеристичного рівняння ланки можна визначити за допомогою функції Mathcad polyroots .
Для цього необхідно записати в вектор аргумента функції polyroots
коефіцієнти характеристичного рівняння наступним чином v=(1 2*𝜉*T T2)T .
Значення коренів будуть виведені в значенні " polyroots=" .
Полярний
момент інерції,
Н∙м2
J= ,
,
де 𝐺 − вага якоря електродвигуна, Н;
𝐷 − діаметр якоря електродвигуна, м.
Параметри варіантів ланки для виконання лабораторної роботи приведені в таблиці 1.
Таблиця 1.1. Параметри ланки
Параметри ланки |
Робочі місця |
|||||||
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
|
|
0.122 |
0.0437 |
0.043 |
0.127 |
0.119 |
0.124 |
0.044 |
0.048 |
|
10 |
12 |
14 |
16 |
18 |
20 |
22 |
24 |
𝐺, кН |
17,3 |
3,44 |
13,42 |
13,95 |
6,10 |
7,50 |
4,00 |
5,00 |
𝐷, м |
0.74 |
0.66 |
0.67 |
0.68 |
0.7 |
0.72 |
0.76 |
0.78 |
|
100 |
105 |
110 |
115 |
120 |
125 |
130 |
135 |
 ,ом
,ом ,мГн
,мГн