

14. Назначение, основные функции и структурная схема и принцип работы аппаратуры «нерпа».
Аппаратура «НЕРПА» также как и аппаратура АБСС-1 автоматически управляет огнями светофоров и приводами стрелочных переводов. Кроме того, эта аппаратура предназначена для определения номера и направления движения электровоза по опасному участку. Структура этой аппаратуры показана на рис.64.
Аппаратура «НЕРПА» состоит из двух полукомплектов: передающего и приемного. Передающий полукомплект (рис. 64а) устанавливается на электровозе. В состав передающего полукомплекта входят генераторы стабильной частоты, часть из которых (1,2,3,4,5) предназначена для кодирования номера электровоза. Всего предусмотрено 25 комбинаций для кодирования таких номеров. Остальные генераторы фиксированной частоты (6,7,8,9) предназначены для управления стрелками и огнями светофоров. Для кодирования конкретного номера электровоза включается постоянно конкретная комбинация из пяти генераторов, а для выбора определенного маршрута включается один из генераторов остального набора. Фиксированные частоты включенных генераторов этого типа подаются в смеситель. Смешанная частота затем подается на усилитель низкой частоты, и направляются в модулятор, где на смешенный спектр накладываются колебания высокой несущей частоты, возбуждаемых специальным генератором ВЧ. Этот процесс называется модуляцией колебаний. Модулированные колебания вновь усиливаются и направляются в антенну А, расположенную на электровозе, которая формирует волновой электромагнитный сигнал. Этот сигнал воспринимается антеннами приемного полукомплекта. Приемный полукомплект (рис. 64б) имеет две рамочные антенны А1 и А2, которые устанавливаются таким образом, чтобы сигнал с передающей антенны А электровоза последовательно достигал каждую из них при его движении.
Сигнал с первой приемной антенны усиливается и направляется в демодулятор, который выделяет из его спектра только низкочастотные колебания. Эти колебания усиливаются по низкой частоте и направляются в полосовые фильтры (фильтр1, фильтр2, фильтр3, и т.д.). Так как низкочастотный сигнал представляет собой смесь колебаний различной частоты, то полосовые фильтры выделяют из этой смеси только колебания той частоты, на которую они настроены.
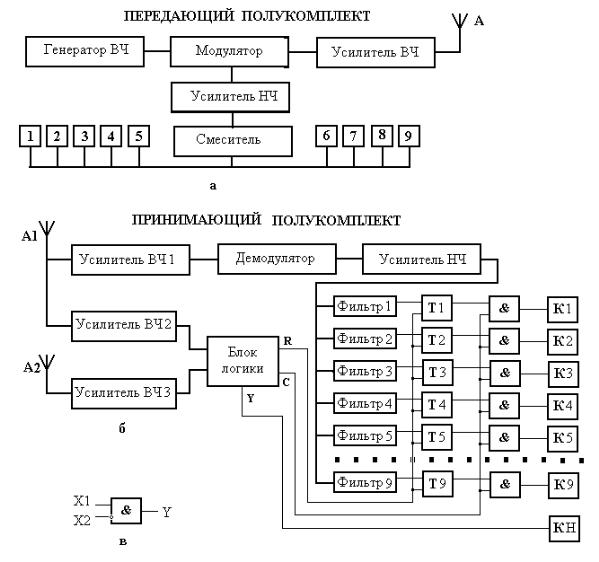
Рис.64. Структурная схема аппаратуры «НЕРПА».
Полосовые фильтры настраиваются на частоты генераторов 1-9 передающего полукомплекта. При наличии в смешенном спектре соответствующих гармоник колебаний этих генераторов фильтры активизируют соответствующие триггеры Т1-Т9, которые в свою очередь через логические ключи И при наличии управляющего импульса включают необходимые управляющие реле К1-К9.
Сигналы с первой и второй приемной антенны одновременно подаются через усилители ВЧ1 и ВЧ2 на блок логики, который формирует сигналы управления логическими ключами И и сигналами обнуления триггеров. Кроме того, блок логики формирует сигнал Y, определяющий направление движения электровоза по опасному участку трассы.
Принцип формирования этого сигнала показан на схеме рис.64в. Параметры Х1 и Х2 это сигналы поступающие на блок логики через усилители с приемных антенн А1 и А2. Так как эти сигналы не одновременно поступают на приемные антенны, то при одном направлении движения электровоза вначале сигнал поступает на антенну А1, при этом параметр Х1 становится единичным, а параметр Х2 остается нулевым. Однако на вход логического ключа И этот параметр подается в инвертированном виде поэтому в этом случае на выходе блока логики параметр Y будет единичным. При обратном движении электровоза этот параметр равен нулю. Таким образом, по величине параметра Y система различает направление движения электровоза.
Требования к системам автоматической блокировки и световой сигнализации рельсового транспорта.
Системы автоматической блокировки и световой сигнализации рельсового транспорта должны обеспечивать:
1. Автоматическое переключение зеленого сигнала светофора на красный при срабатывании датчика положения.
2. Автоматический перевод всех стрелок на выбранном маршруте при срабатывании датчика запроса, если выбранный маршрут свободен.
3. Автоматическое переключение нормально горящего красного сигнала светофора на мигающий красный при срабатывании датчика запроса.
4. Автоматическое включение мигающего зеленого сигнала светофора, если не все стрелки переведены на выбранном маршруте.
5. Автоматическое переключение красного сигнала светофора на зеленый при срабатывании датчика отбоя.