

Типы рычажных механизмов.
1. Кривошипно-ползунный (шатунный).

4-х звенный механизм

Кулисный механизм

Рычажные механизмы смыкания.
Задачи:
герметизация какого-то узла в месте стыка,
обеспечение самоторможения механизма
Колено-рычажные 6-ти звенные механизмы.

Применяются в чеканочных прессах (вырубные пресса)
ФПАКМ
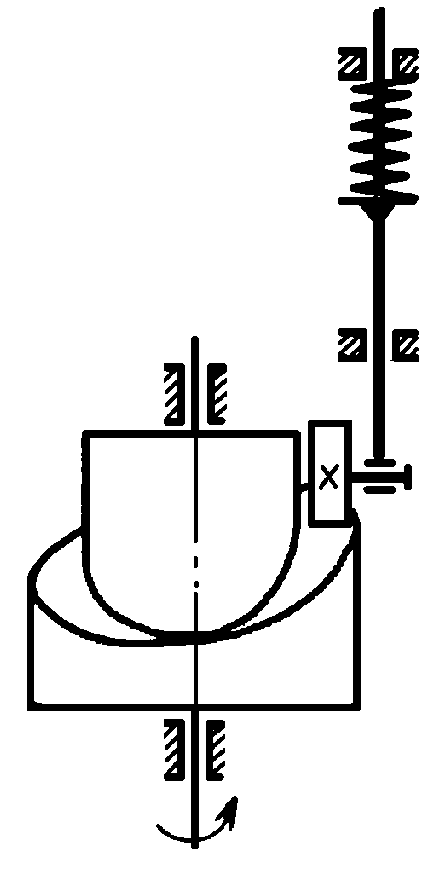
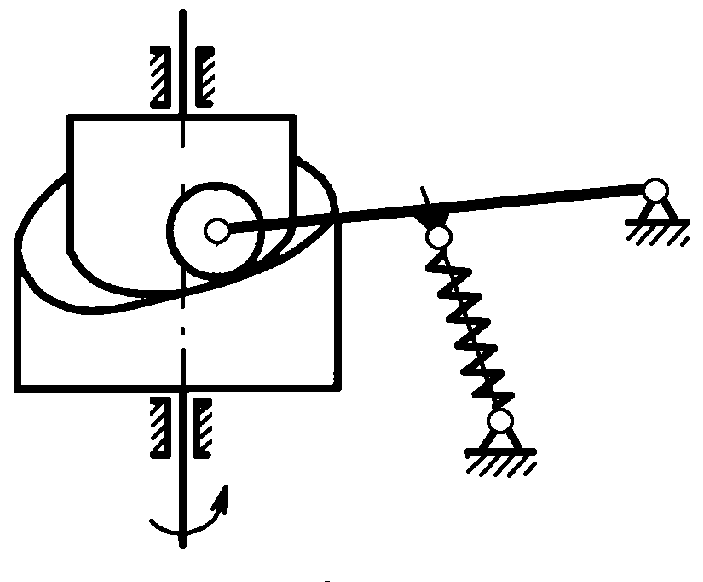
Механизм зажима плит в первом варианте конструкции был коленно-рычажным с червячно-винтовым приводом (рис.а), в модернизированной машине с этой целью используется гидроцилиндр (рис. 3. 15, б). В первом варианте фиксация плит в сжатом состоянии обеспечивается условием самоторможения коленно-рычажных групп 2 в распрямленном положении, во втором – специальным клином 7, который перемещается с помощью гидроцилиндра 6 вправо и запирает поршень гидроцилиндра зажима плит в верхнем положении.

Рис. 6 Механизмы зажима
Червячный редуктор (левая резьба) при запуске сжимает и разжимает рамки.
Литьевой пресс-автомат.

Корпус гидроцилиндра закреплен, но может качаться.
.
Лекция 7
Кулачковые механизмы ма
Классификация кулачковых механизмов.
Кулачок с поступательно двигающимся роликом-толкателем.

γ(1) – угол давления – это угол между направлением движения толкателя и нормалью к точке касания ролика.
γ =<30º
Кулачковый механизм с качающимся толкателем.
γ=<45º
Цилиндрический кулачок с роликом и поступательно движущимся толкателем.
4. Цилиндрический кулачок с качающимся толкателем.
Использование кулачковых механизмов в ма.
Различия между кулачковыми и рычажными мех-ми.
Кулачковый механизм – высшая пара (контакт по точке).
Чем выше пара, тем меньше усилие, которое передает механизм.
В рычажных механизмах контакт по поверхности, давление относится к поверхности.
В кулачковых механизмах давление относится к точке, Р не бывает больше 10 т. Поэтому кулачки используются во вспомогательных механизмах (исключение таблеточная машина).
Достоинства кулачковых механизмов:
Мы можем получить остановку движения толкателя. Когда кулачок идет по окружности, то толкатель в выстое.
Мы можем организовать любой ( в пределах разумного) закон движения (γ =<30º)
Кулачковый мех-м позволяет организовать быстроходные машины.
Недостатки:
Усилие можно направить только в пределах допустимого угла давления.
Необходимость обеспечить замыкание системы.
Выбор закона движения толкателя.
Проектирование кулачкового механизма машины-автомата после того, как определен его тип, состоит из следующих этапов: выбор закона движения ведомого звена (толкателя); определение основных размеров звеньев; построение профиля кулачка или расчет полярных координат профиля; расчет и конструирование деталей кулачкового механизма.
Закон движения ведомого звена кулачкового механизма выбирается с учетом ряда требований.
Первое требование – соответствие закона движения функции исполнительного механизма. Иногда сам характер операции определяет выбор закона движения, например, если механизм подачи должен осуществлять перемещение объекта обработки с постоянной скоростью. Чаще встречаются случаи, когда характеристика операции позволяет найти только отдельные кинематические параметры закона движения (ход толкателя или угол его поворота, максимальную допустимую скорость или ускорение и т.п.), а также время выполнения отдельных фаз движения ведомого звена. Возможны и такие ситуации, когда время движения ведомого звена может быть найдено из анализа смежных операций технологического процесса или всего процесса в целом.
Второе требование – высокая производительность машины. Если операция технологического процесса, для которой проектируется кулачковый механизм, занимает в общей циклограмме машины определенное место, не совмещенное с другими операциями, и не имеется ограничений, наложенных на скорость исполнительного органа по условиям выполнения этой операции, то время выполнения операции должно быть минимизировано. При этом следует иметь в виду, что уменьшение интервалов времени движения приводит к росту динамических нагрузок и, следовательно, к повышению потерь на трение в кинематических парах, снижению к.п.д., увеличению пикового значения крутящего момента на валу кулачка.
Третье требование – минимальный расход энергии для приведения механизма в движение. Нетрудно заметить, что это требование находится в противоречии с изложенным выше; конструктору приходится принимать компромиссное решение исходя из конкретных условий проектирования.
Четвертое требование – обеспечение прочности и долговечности механизма. Закон движения толкателя определяет характер динамической нагрузки на звенья механизма и влияет на радиус кривизны центрового профиля кулачка.
Выбором рационального закона движения можно уменьшить или ликвидировать удары в кинематических парах, снизить величину контактных напряжений в кулачковой паре.
Пятое требование – технологичность профиля кулачка. При прочих равных условиях отдается предпочтение такому закону движения толкателя, который обеспечивает наибольшую простоту изготовления кулачка. Однако широкое применение в последние годы станков с числовым программным управлением в какой-то мере снизило актуальность этого требования
Мех-м с жесткими ударами, т.е. резким изменением скорости. Такой закон S(t) нам не подходит.
Необходимо выбирать синусоидальный или косинусоидальный закон.
![]()
![]()
