

Расчет времени срабатывания гидроцилиндра двойного действия.
В машинах-автоматах под временем срабатывания гидравлического исполнительного механизма понимается время перемещения поршня и соединенного с ним рабочего органа машины из одного крайнего положения в другое.
Предполагается, что давление в напорной линии перед распределителем Р (см. рис. 9. 1) постоянное.
Отсчет времени срабатывания tС ведется с момента переключения распределителя Р. В общем случае в состав времени срабатывания входят следующие элементы
1.Время tРАС распространения упругой волны (давления) в жидкости, находящейся втрубопроводе, соединяющим распределитель с гидроцилиндром ГЦ. Это время рассчитывается по скорости с распространения звука в рабочей жидкости:
tРАС = L /c,
где L – длина участка трубопровода между распределителем и гидроцилиндром. Для воды и минеральных масел при условиях эксплуатации гидроприводов с 1430 м/с. Время tРАС очень незначительно, его в расчетах обычно не учитывают.
2 Время tУ ускоренного движения поршня. Как показывает опыт эксплуатации гидропривода, эта составляющая, как правило, мала, однако, в каждом конкретном случае необходим анализ величины ее вклада.
3 .Время tР равномерного движения поршня – основная составляющая времени срабатывания.
4.Время tТ торможения поршня. При отсутствии тормозных устройств tТ = 0, а при их наличии tТ подлежит поверочному или проектному расчету.
Таким образом
tС = tРАС + tУ + tР + tТ .
При выполнении предпроектного синтеза машины-автомата грубая оценка времени срабатывания гидравлического исполнительного механизма осуществляется только с учетом времени tР и tТ . Если известны полный ход S поршня, его перемещение при торможении ST, скорость vP равномерного движения и время tТ торможения, то
tС = (S ST)/ vP + tТ.
Анализ движения поршня. Длительности интервалов tУ , tР , tТ можно найти интегрированием дифференциального уравнения движения поршня гидравлического цилиндра.
При составлении этого уравнения вводятся следующие допущения:
Масса движущихся частей, включая и массу жидкости в трубах и цилиндре, остается в процессе движения поршня постоянной.
2. Давление р1 в напорной линии, а также р2 в линии слива при работе механизма не меняются .
Сила РС технологического сопротивления, приложенная к штоку поршня постоянна или может быть приведена к постоянной на отдельных участках его перемещения.
Силы трения в уплотнения в подвижных соединениях от скорости движения поршня не зависят.
Упругие деформации рабочей жидкости не учитываются.
Температура рабочей жидкости в процессе движения поршня не меняется.
Геометрический напор по сравнению с пьезометрическим мал и им можно пренебречь.
Потоки жидкости – неразрывные, режим движения жидкости в трубах – ламинарный.
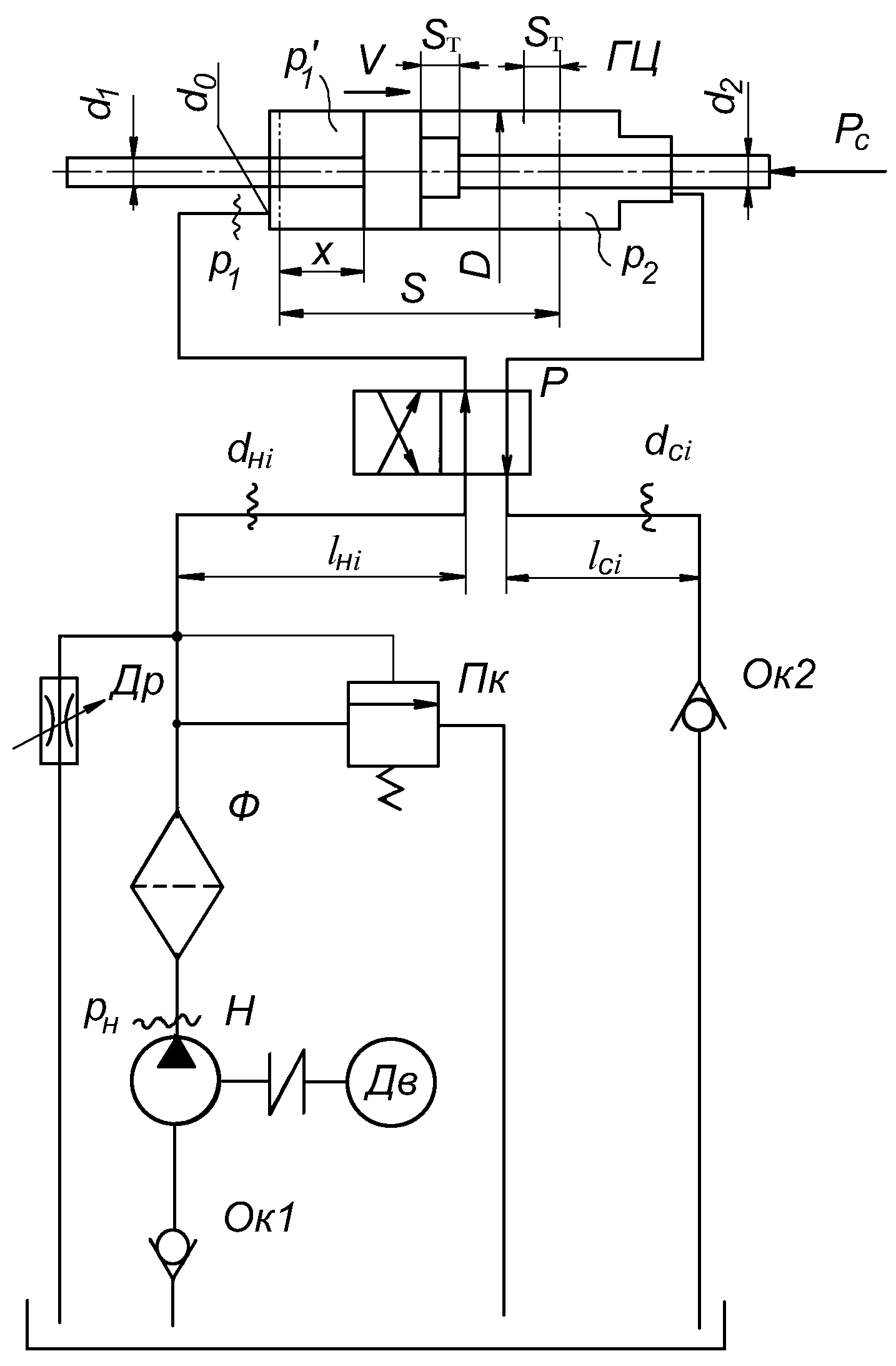
Рис12.. Гидравлическая схема к расчету времени срабатывания:
ГЦ – гидроцилиндр; Р – распредеделитель; Др – дроссель регулируемый; Пк – клапан переливной; Ф – фильтр; Н – насос; Дв – двигатель; ОК1, ОК2 – клапаны обратные
На основании второго закона Ньютона дифференциальное уравнения движения поршня для гидроцилиндра с односторонним штоком (рис) можно записать в виде
m dv/dt = p1 F1 – p2 F2 – PС ,
где m приведенная к поршню масса движущихся частей;
p1 давление рабочей жидкости в бесштоковой полости поршня;
F1 – площадь живого сечения цилиндра слева [для бесштоковой полости - D2 /4; при наличии штока - (D2 – d12 )/4];
F2 площадь живого сечения цилиндра справа - (D2 – d12 )/4.
П![]() риведенная
масса m
складывается из массы соединенных
с поршнем поступательно движущихся
частей и массы жидкости, заполняющей
нагнетательную и сливную линии
трубопроводов. Для расчета ее величины
используется условие равенства
кинетической энергии приведенной массы
и упомянутых реальных масс
риведенная
масса m
складывается из массы соединенных
с поршнем поступательно движущихся
частей и массы жидкости, заполняющей
нагнетательную и сливную линии
трубопроводов. Для расчета ее величины
используется условие равенства
кинетической энергии приведенной массы
и упомянутых реальных масс
В этом выражении mП масса всех поступательно движущихся частей, соединенных со штоком.
Принимая во внимание, что отношение скорости vi жидкости в i ом трубопроводе к скорости v поршня обратно пропорционально площадям их сечений, получим
m = mП + mi (D/di )4.
Масса жидкости в i – ом участке трубопровода, имеющего диаметр di и длину li , равна
mi = li di 2/4,
где плотность рабочей жидкости.
Д![]() авление
p1 в
бесштоковой полости гидроцилиндра
определяется с помощью уравнения
Бернулли для расхода жидкости через
отверстие диаметром do с
коэффициентом расхода
(для круглых и квадратных отверстий
0,62) :
авление
p1 в
бесштоковой полости гидроцилиндра
определяется с помощью уравнения
Бернулли для расхода жидкости через
отверстие диаметром do с
коэффициентом расхода
(для круглых и квадратных отверстий
0,62) :
откуда, если обозначить Fо = do2/4, следует
![]()
![]()
![]()
![]()
![]()
![]()
Варианты решения:
Справочник Камке со всеми дифференциальными уравнениями.
MathCad.
![]()
Vp – скорость равномерного движения.

tр – время равномерного движения
![]() (1)
(1)
Неизвестно время на разгон
Интегрируем уравнение:
X=0; V=0.
![]() (2)
(2)
![]()
V,t – текущая скорость и время
to – время разгона
![]()
Второе интегрирование:
X=0; t=0
![]() (3)
(3)
Исследование
2-й зависимости показывает, что при
t=3,3to,
![]() – подставляем в уравнение
– подставляем в уравнение ![]()
Время торможения:
![]()
Sт – путь торможения
Vср – средняя скорость
Vp – равномерная скорость
Полное время срабатывания:
![]()
Лекция 11