Завдання для розрахунково – графічних та контрольних робіт
Розрахунково - графічні або контрольні роботи з теоретичної механіки виконуються в зошиті шкільного зразку, на обкладинці якого вказуються назва роботи, курс, група, прізвище та ініціали студента, варіант роботи. Виконання кожного завдання починається з його назви на новій сторінці. Номер варіанту завдань дає викладач.
Перед тим як проводити розрахунки , треба добре розібратися в умовах задачі і схеми до неї. При цьому треба головну увагу звертати на механічний загальний зміст завдання ( рівновагу тіла, дію механізму, рух системи, тощо).
Рисунки схем мають бути виконані з допомогою креслярського приладдя, чітко і акуратно. На них мають бути показані всі атрибути, необхідні для виконання завдання (вектори, розміри, осі координат і все інше). Розрахунки слід супроводжувати короткими поясненнями, як це зроблено у відповідних прикладах.
При виконанні завдань треба звернути увагу на слідуюче. Механіка є наука природознавча , про взаємодію і рух реальних макротіл у просторі та часі. Тому головним при практичному використанні теоретичної механіки є математичне описання (формулювання) механічних умов задачі (її постановка). Якщо це зроблено у відповідності з законами механіки і за її правилами, тоді така задача завжди має розв’язок просто тому, що стан тіла, або тіл, який математично описується в задачі, відбувається насправді у природі. Це дає можливість контролювати за тим, чи правильно розв’язується задача ще в процесі цього розв’язання. В першу чергу це робиться за розмірністю. Якщо в задачі виникла необхідність складати (віднімати) величини різних розмірностей (кілограми з метрами , ньютони з секундами і таке інше) це означає, що десь зроблена помилка і задача розв’язується неправильно. З другого боку, якщо при розв’язанні задачі одержано від’ємний час, додатна робота сили опору, від”ємна кінетична енергія або ще якась фізична величина, яка не існує в природі макросвіту, це означає, що десь зроблено помилку і задача розв”язується неправильно. Наведені правила дають можливість контролювати хід розв”язання задач механіки на всіх етапах.
При виконанні завдань треба керуватися вказаною для кожної задачі теорією і прикладами розв”язання аналогічних задач, приведених в посібнику “Основи теоретичної механіки” та в інших підручниках і розробках з теоретичної механіки.
Завдання к. Кінематіка
Задача К1. КІНЕМАТІКА ТОЧКИ. Визначення кінематичних характеристик руху точки.
За даними рівняннями руху точки М визначити:
а) рівняння траєкторії точки і зобразити траєкторію на рисунку;
б) швидкість й прискорення точки для моменту часу t1 ;
в) для моменту часу t1 знайти положення точки М на траєкторії і показати вектори швидкості, дотичного, нормального та повного прискорень;
г) радіус кривізни траєкторії в момент часу t1 .
Дані задачі наведені в таблиці 1 завдань: теорія в параграфах 1-5, а приклад в параграфі 7 глави 1, розділу 1 посібника «Основи теоретичної механіки».
Необхідно знати:
1. Способи завдання руху точки.
2. Формули, за якими визначаються проекції на декартові осі координат вектора швидкості та вектора прискорення точки.
3. Величини нормального та дотичного прискорень точки.
4. Формули, за якими визначається аналітично будь-який вектор, якщо відомі його проекції на осі координат.
Необхідно вміти:
1. Діставати похідні від різних функцій.
2. Використовувати різні тригонометричні тотожності.
Задача К2. ПРОСТІ ВИДИ РУХІВ ТВЕРДОГО ТІЛА ТА ЇХ ПЕРЕТВОРЕННЯ.
Визначення швидкостей і прискорень точок твердого тіла при поступальному і обертальному рухах.
За даними рівняннями прямолінійного поступального руху тягара 1 визначити і показати на малюнку швидкість, дотичне, нормальне та повне прискорення точки М механізма, якщо тягар пройшов шлях S.
Схеми механізмів показані на рис. 1, а необхідні дані наведені в таблиці 2 завдань: теорія в параграфах 1-4, а приклад з задачею в параграфі 5 глави 3 розділу 1 посібника.
Необхідно знати:
1.Основну теорему поступального руху тіла.
2. Формули, що за заданим законом S=S(t) поступального прямолінійного руху тіла визначають його швидкість і прискорення.
3. Формули, що за заданим законом обертального руху твердого тіла навколо нерухомої осі j=j(t) визначають його кутову швидкість і кутове прискорення.
4. Формули, за якими визначається швидкість і прискорення будь-якої точки тіла, що обертається навколо нерухомої осі.
5. Якщо обертання від одного тіла до другого передасться безпосереднім дотиком або за допомогою ременя, тоді кути обертання цих тіл (коліс), їх кутові швидкості і кутові прискорення обернено пропорційні їх радіусам (числам зубців Z):
![]() .
.
Необхідно вміти:
1. Класифікувати прості рухи твердого тіла.
2. Диференціювати різні функції.
3. Геометрично складати два вектори.
Задача К3. КІНЕМАТИЧНИЙ АНАЛІЗ ПЛОСКОГО МЕХАНІЗМУ.
Для заданного положення механізму знайти швидкість і прискорення точки В, а також кутову швидкість і кутове прискорення ланки, яка робить плоский рух. Схеми механізмів показані на рис. 2, необхідні дані наведені в таблиці 3 завдань: теорія в параграфах 1-4, а приклад - в параграфі 5 глави 4 розділу 1 посібника.
Необхідно знати:
1. Формулу, що визначає швидкість точки М твердого тіла, яка робить плоский рух.
2. Поняття миттьового центру швидкостей (м.ц.ш.).
3. Теорему про проекції швидкостей двох точок плоскої фігури.
4. Теорему про прискорення точок плоскої фігури.
Необхідно вміти:
1. Класифікувати рухи ланок плоского механізму.
2. Визначати положення миттьового центру швидкостей ланки, що робить плоский рух, як м.ц.ш. плоскої фігури.
3. Використовувати поняття м.ц.ш. для визначення швидкостей точок плоскої фігури.
4. Аналітичне додавати вектори і визначати їх суму.
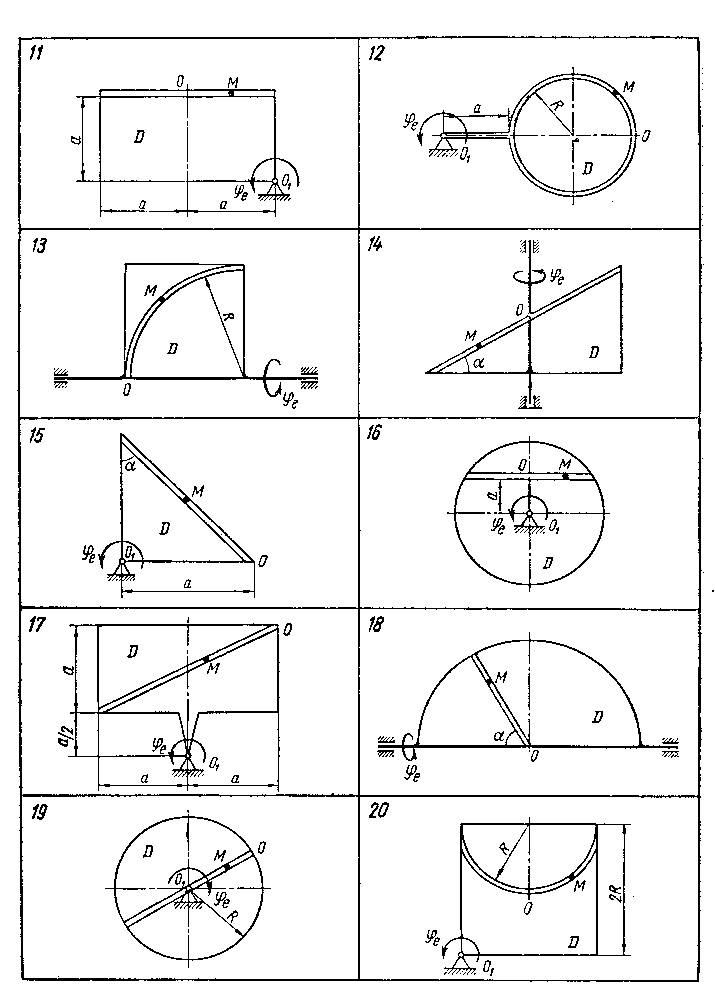
Задача К4. СКЛАДНИЙ РУХ ТОЧКИ. Визначення абсолютної швидкості і абсолютного прискорення точки.
За данними рівняннями відносного руху точки М і переносного руху тіла Д визначити для момента часу t=t1 абсолютну швидкість і абсолютне прискорення точки М, яка починає рухатися з точки О.
Схеми механізмів показані на рис. З, а необхідні дані наведені в таблиці 4 завдань, теорія в параграфах 1-4, а приклади в параграфі 5 глави 5 розділу 1 посібника.
Необхідно знати:
1. Основні визначення складного руху точки:
- абсолютний, відносний і переносний рухи;
-
абсолютна
![]() ,
відносна
,
відносна
![]() і переносна
і переносна
![]() швидкості точки;
швидкості точки;
-
абсолютне
![]() ,
відносне
,
відносне
![]() ,
і переносне
,
і переносне
![]() прискорення точки;
прискорення точки;
-
прискорення Коріоліса .
![]()
2. Як визначається абсолютна швидкість точки.
3. Як визначається абсолютне прискорення точки.
4. Як визначається напрямок прискорення Коріоліса за правилом Жуковського.
Неохідно вміти:
1. Складний рух точки розкладати на відносний та переносний.
2. Брати похідні від простих функцій.
3. Знаходити напрямок прискорення Коріоліса.
4. Визначати вектор, що дорівнює геометричній сумі декількох векторів.
Таблиця 1
№ варіанта |
Вид рівнянь руху |
f1(t) |
f2(t) |
а1,см |
b1,см |
а2, см |
b2,см |
j, рад |
t1, сек. |
01 02 03 |
x=a1f1(t)+b1 y=a2f2(t)+b2 |
sin2j sin2j sin j |
cos2j cos2j sin j |
2 1 -10 |
4 8 5 |
3 1 2 |
5 -3 4 |
(П/8)t (П/12)t (П/6)t |
2 4 2 |
04 05 06 |
x=a2f1(t)+b2 y=a1f2(t)+b1 |
sin2j2 sin2j2 sin j2 |
cos2j2 cos j2 sin j2 |
3 5 -1 |
1 2 6 |
1 5 3 |
2 3 -1 |
(П/18)t (ÖП/3)t (П/24)t |
3 1 ½ |
07 08 09 |
x=a1f1(t)+b2 y=a2f2(t)+b1 |
j2 j j |
j2 j j2 |
8 4 9 |
2 1 12 |
6 10 8 |
5 7 3 |
2t 3t2 t2 |
2 3 2 |
10 11 12 |
x=a2f1(t)+b1 y=a1f2(t)+b2 |
sin j sin j2 sin j |
cos j cos j2 cos j |
14 10 5 |
18 12 9 |
5 10 5 |
7 15 11 |
П/6t (Ö3/2П)t (3/5П)t |
1 1/3 1/3 |
13 14 15 |
x=a1f2(t)+b1 y=a2f1(t)+b2 |
j2 j3 j3 |
j j j2 |
3 2 1 |
8 10 8 |
7 5 2 |
12 11 13 |
3t 5t 4t |
3 2 1 |
16 17 18 |
x=b1f1(t)+a1 y=b2f2(t)+a2 |
sin2 j j3 sin 2j |
sin2j j2 sin2j |
2 5 9 |
12 7 11 |
4 12 7 |
14 15 12 |
(П/6)t 3t (П/10)t |
2 0 ¼ |
19 20 21 |
x=b2f1(t)+a2 y=b1f2(t)+a1 |
cos2 j -sin j cos 2j |
cos 2j -cos j -cos 2j |
3 10 10 |
-10 -20 5 |
4 5 4 |
-5 4 -6 |
(П/12)t (П/8)t (П/16)t |
4 4/3 2 |
22 23 24 |
x=b1f1(t)+a2 y=b2f2(t)+a1 |
sin2 j sin2 j2 j |
cos 2j cos 2j2 j2 |
2 1 5 |
3 -6 3 |
1 1 7 |
7 -3 -9 |
(П/8)t (П/24)t 5t |
4/5 4 2 |
25 26 27 |
x=b2f1(t)+a1 y=b1f2(t)+a2 |
sin 2j sin 2j2 j2 |
cos2 j cos2 j2 j3 |
9 1 2 |
-2 -4 12 |
5 2 3 |
-6 5 -2 |
(П/24)t2 (П/18)t t |
2 3 2 |
28 29 30 |
x=b1f2(t)+a1 y=b2f1(t)+a2
|
cos2 j cos2 j2 sin 2j |
sin2 j sin j2 cos 2j |
3 1 2 |
-1 12 6 |
5 4 3 |
-4 -9 11 |
(П/9)t (П/4)t2 (П/12)t |
6 1/2 4/9 |
Таблиця 2
-
№ варіанта
r2,см
R2, см
R3,см
S,м
Рівняння руху тягаря x=x(t), см
01
02
03
40
25
10
60
50
30
40
40
15
0,05
2,00
0,70
5+20t2
2+50t2
70t2
04
05
06
15
50
60
30
75
80
20
25
40
0,64
1,35
0,72
3+100t2
60t2
8+50t2
07
08
09
40
75
35
80
100
70
50
50
40
0,36
0,20
0,70
100t2
10+30t2
7+70t2
10
11
12
15
30
20
45
50
25
90
60
50
1,20
1,80
4,80
20+30t2
20t2
30t2
13
14
15
80
30
40
80
50
60
40
60
80
0,405
1,69
0,90
15+50t2
2+100t2
5+90t2
16
17
18
50
45
90
70
60
100
60
60
70
3,60
4,50
5,00
90t2
50t2
6+20t2
19
20
21
65
75
10
85
100
10
40
50
30
1,60
0,196
2.80
40t2
6+40t2
10+70t2
22
23
24
40
30
15
60
50
30
30
50
100
0,968
0,144
2,312
80t2
3+90t2
8+80t2
25
26
27
40
30
30
60
60
45
90
60
30
0,245
1,25
0,90
4+50t2
15+20t2
20+40t2
28
29
30
40
30
30
15
50
60
45
60
90
1,69
1,20
0,40
8+100t2
10+30t2
2+40t2
Таблиця 3
№ варианта |
Розміри, см |
wOA , рад/с |
w1 , рад/с |
eOA , рад/с2 |
VA , см/с |
aA , см/с2 |
||
ОА |
r |
AB |
||||||
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
1 |
40 |
15 |
- |
2 |
- |
2 |
- |
- |
2 |
30 |
15 |
- |
3 |
- |
2 |
- |
- |
3 |
- |
50 |
- |
- |
- |
- |
50 |
100 |
4 |
35 |
- |
- |
4 |
- |
8 |
- |
- |
5 |
25 |
- |
- |
1 |
- |
1 |
- |
- |
6 |
40 |
15 |
- |
1 |
1 |
0 |
- |
- |
7 |
35 |
- |
75 |
5 |
- |
10 |
- |
- |
8 |
- |
- |
20 |
- |
- |
- |
40 |
20 |
9 |
- |
- |
45 |
- |
- |
- |
20 |
10 |
10 |
25 |
- |
80 |
1 |
- |
2 |
- |
- |
11 |
- |
- |
30 |
- |
- |
- |
10 |
0 |
12 |
- |
- |
30 |
- |
- |
- |
20 |
20 |
13 |
25 |
- |
55 |
2 |
- |
4 |
- |
- |
14 |
45 |
15 |
- |
3 |
12 |
0 |
- |
- |
15 |
40 |
15 |
- |
1 |
- |
1 |
- |
- |
16 |
55 |
20 |
- |
2 |
- |
5 |
- |
- |
17 |
- |
30 |
- |
- |
- |
- |
80 |
50 |
18 |
10 |
- |
10 |
2 |
- |
6 |
- |
- |
19 |
20 |
15 |
- |
1 |
2,5 |
0 |
- |
- |
20 |
- |
- |
20 |
- |
- |
- |
10 |
15 |
21 |
30 |
- |
60 |
3 |
- |
8 |
- |
- |
22 |
35 |
- |
60 |
4 |
- |
10 |
- |
- |
23 |
- |
- |
60 |
- |
- |
- |
5 |
10 |
24 |
25 |
- |
35 |
2 |
- |
3 |
- |
- |
25 |
20 |
- |
70 |
1 |
- |
2 |
- |
- |
26 |
20 |
15 |
- |
2 |
1,2 |
0 |
- |
- |
27 |
- |
15 |
- |
- |
- |
- |
60 |
30 |
28 |
20 |
- |
50 |
1 |
- |
1 |
- |
- |
29 |
12 |
- |
35 |
4 |
- |
6 |
- |
- |
30 |
40 |
- |
- |
5 |
- |
10 |
- |
- |
Таблиця 4
№ варіанта |
R, см |
а, см |
a, град |
Рівняння відносного руху точки М ОМ=Sr(t) |
Рівняння руху тіла |
t1, c |
|
|
jе=jе(t), рад |
xе=xе(t), см |
|||||||
1 |
- |
25 |
- |
18sin(pt/4) |
2t3-t2 |
- |
0,5 |
|
2 |
20 |
- |
- |
20sin(pt) |
0,5t2+1 |
- |
1 |
|
3 |
- |
30 |
- |
6t3 |
2t+0,5t2 |
- |
2 |
|
4 |
- |
- |
60 |
10sin(pt/6) |
0,6t2 |
- |
1 |
|
5 |
30 |
- |
- |
40pcos(pt/6) |
3t-0,5t3 |
- |
2 |
|
6 |
15 |
- |
- |
- |
- |
3t+0,3t3 |
3 |
jr=0,2pt3 |
7 |
- |
40 |
60 |
20cos(2pt) |
0,5t2 |
- |
0,5 |
|
8 |
- |
- |
30 |
6(t+0,5t2) |
t3-5t |
- |
2 |
|
9 |
- |
- |
- |
10(1+sin2pt) |
4t+1,5t2 |
- |
0,3 |
|
10 |
20 |
20 |
- |
20pcos(pt/4) |
1,2t+t2 |
- |
1,3 |
|
11 |
- |
25 |
- |
25sin(pt/3) |
2t2-0,5t |
- |
4 |
|
12 |
30 |
30 |
- |
15pt3/8 |
5t-4t2 |
- |
2 |
|
13 |
40 |
- |
- |
120pt2 |
8t2-3t |
- |
0,25 |
|
14 |
- |
- |
30 |
3+14sin(pt) |
4t-2t2 |
- |
0,75 |
|
15 |
- |
60 |
45 |
5(t2+t) |
0,2t3+t |
- |
2 |
|
16 |
- |
20 |
- |
20sin(pt) |
t-0,5t2 |
- |
0,5 |
|
17 |
- |
8 |
- |
8t3+2t |
0,5t2 |
- |
1 |
|
18 |
- |
- |
60 |
8t3+2t |
0,5t2 |
- |
1 |
|
19 |
40 |
- |
- |
10t+t3 |
8t-t2 |
- |
2 |
|
20 |
60 |
- |
- |
6t+4t3 |
t+3t2 |
- |
2 |
|
21 |
25 |
- |
- |
3pcos(pt/6) |
6t+t2 |
- |
3 |
|
22 |
30 |
- |
- |
10psin(pt/4) |
4t-0,2t2 |
- |
0,75 |
|
23 |
18 |
- |
- |
6pt2 |
- |
- |
1 |
j=pt3/6 010=02A=20см |
24 |
30 |
- |
- |
75p(0,1t+0,3t3) |
2t-0,3t2 |
- |
1 |
|
25 |
- |
- |
- |
15sin(pt/3) |
10t-0,1t2 |
- |
5 |
|
26 |
- |
- |
45 |
8cos(pt/2) |
-2pt2 |
- |
0,75 |
|
27 |
75 |
- |
- |
- |
- |
50t2 |
2 |
jr=5pt3/48 |
28 |
40 |
- |
- |
2,5pt2 |
2t3-5t |
- |
2 |
|
29 |
30 |
- |
- |
5pt3/4 |
- |
- |
2 |
j=pt3/8 010=02A=40см |
30 |
50 |
- |
- |
4pt2 |
- |
t3+4t |
2 |
|
Рис.1



Рис.2


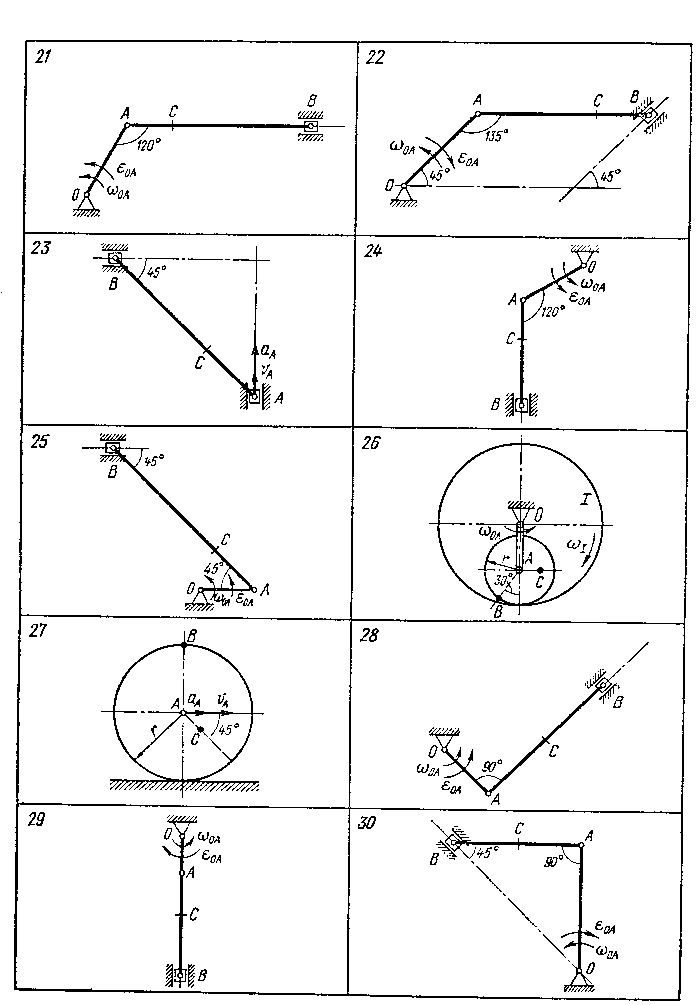
Рис.3