

4.3 Основний принцип утворення механізмів
Основний принцип утворення механізмів полягає у тому, що будь-який механізм можна одержати, якщо до початкової ланки (або початкових ланок) і стояка послідовно приєднувати кінематичні ланцюги з нульовим ступенем вільності.
Відомо, що до складу кожного механізму входять нерухома ланка (стояк), початкові ланки, тобто ланки, закони руху яких задано і від яких залежать закони руху всіх інших ланок. Отже, приступаючи до створення механізму необхідного ступеня вільності, закріпляємо одну з ланок (утворюємо стояк) і вводимо до кінематичної пари з цією ланкою початкові ланки за кількістю ступенів вільності, які повинен мати механізм. При цьому кожна початкова ланка повинна мати тільки один ступінь вільності.
|
а) б) Рисунок 4.9 – Механізми I класу |
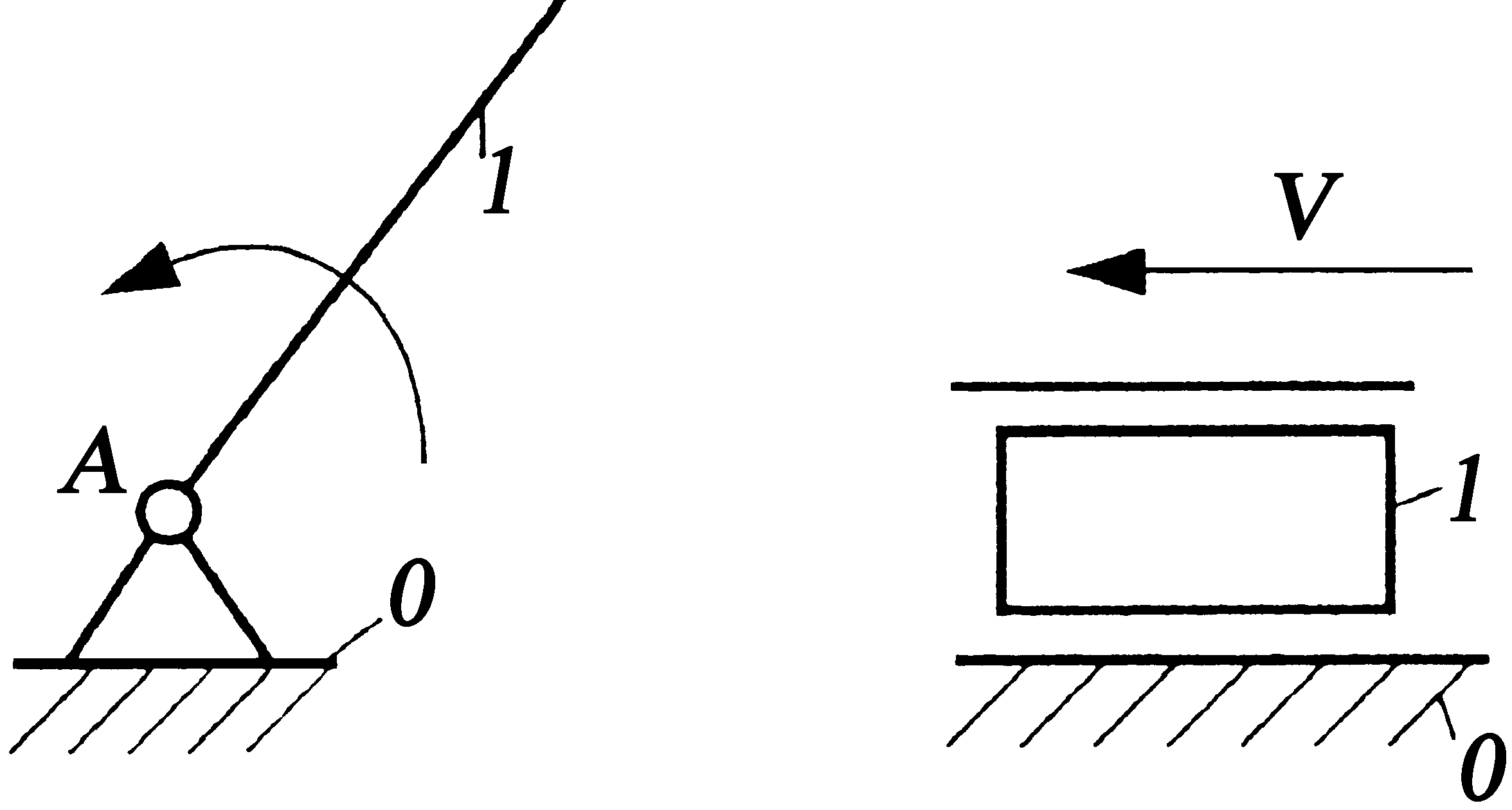
Назвемо умовно початкову ланку і стояк, що утворюють кінематичну пару V класу, механізмом І класу. На рисунку 4.9 наведені механізми І класу, початкові ланки яких утворюють із стояком обертову або поступальну пару. Щоб одержати механізм потрібного ступеня вільності, необхідно до механізму (механізмів) І класу приєднати систему ланок, яка становить один або кілька кінематичних ланцюгів з нульовим ступенем вільності. Остання умова випливає з того, що весь механізм повинен мати ступінь вільності, який дорівнює сумі ступенів вільності механізмів І класу.
Як приклад, розглянемо плоский механізм, наведений на рисунку 4.10. Ступінь вільності цього механізму можна визначити за формулою Чебишова:
W = 3n – 2p5 – p4 = 3 5 – 2 7 – 0 = 1,
де число рухомих ланок n = 5, число кінематичних пар V класу р5 = 7 і число кінематичних пар IV класу р4 = 0.
Якщо прийняти стояк 0 і ланку 1 за механізм І класу (рисунок 4.10,б), то ланки 25 утворюють систему ланок, що мають нульовий ступінь вільності (n= 4, р5 = 6).
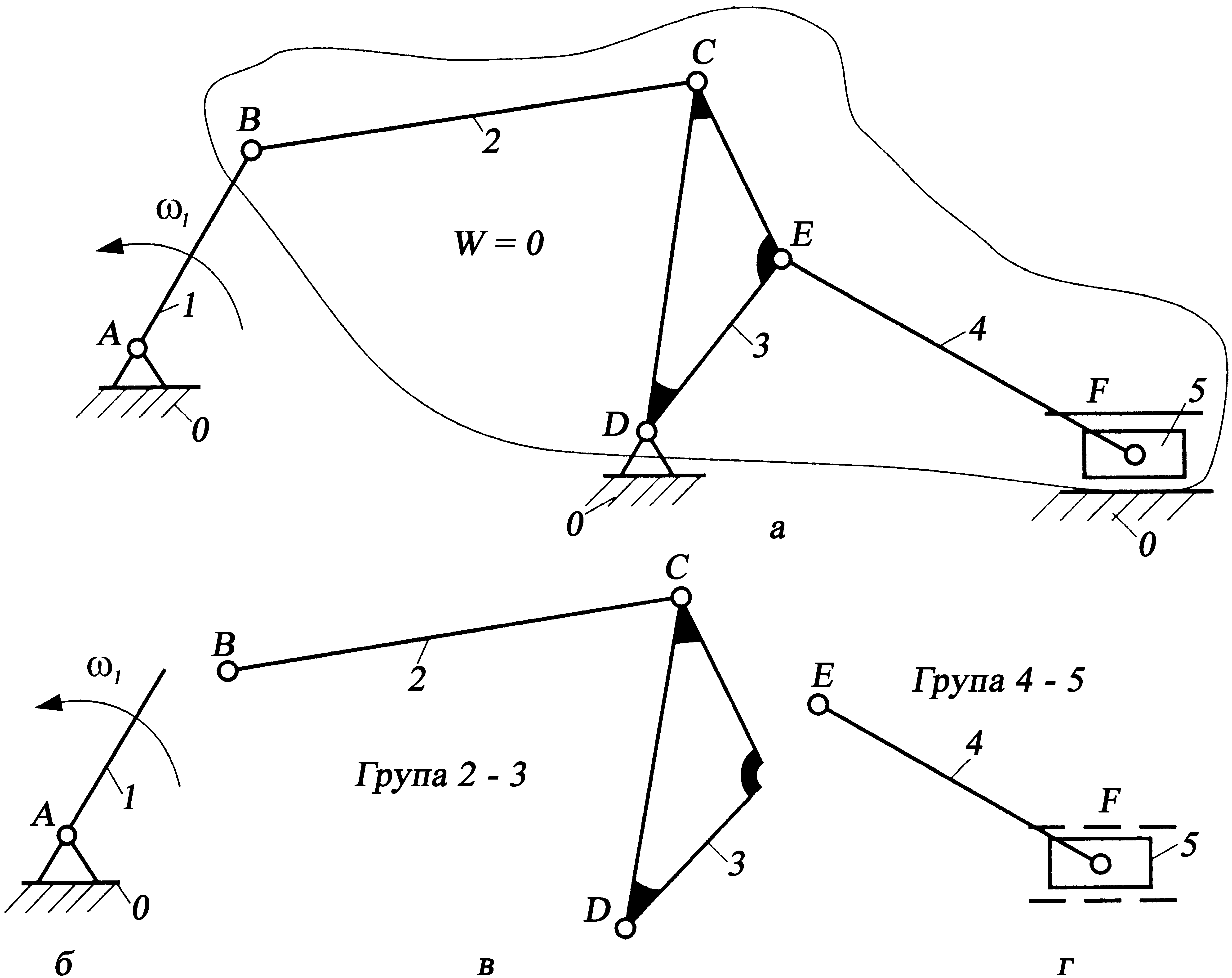
Рисунок 4.10 – Плоский механізм із ступенем вільності W = 1
Неважко побачити, що кінематичний ланцюг з ланок 25 можна поділити на два кінематичні ланцюги: один, складений з ланок 23 (рисунок 4.10, в), і другий, складений з ланок 45 (рисунок 4.10, г). Кожний з цих кінематичних ланцюгів, складений з двох ланок і трьох кінематичних пар V класу, має ступінь вільності Wгр, який дорівнює нулю. Розбити ці ланцюги на простіші кінематичні ланцюги, що мали б нульовий ступінь вільності, неможливо.
Кінематичний ланцюг, який після приєднання його вільними елементами пар до інших ланок механізму не змінює його ступінь вільності і який не можна роз'єднати на простіші кінематичні ланцюги нульового ступеня вільності, називається структурною групою, або групою Ассура.
Таким чином, плоский механізм (див. рисунок 4.10, а) з одним ступенем вільності можна розглядати як такий, що утворений послідовним приєднанням до механізму І класу двох груп: групи 23 і групи 45. Тепер можна дати таке визначення основному принципу утворення механізмів.
Будь-який механізм можна одержати, якщо до механізму (механізмів) І класу послідовно приєднувати структурні групи.
При послідовному приєднанні груп необхідно керуватися певними правилами. При утворенні механізму з одним ступенем вільності перша група приєднується вільними елементами ланок до початкової ланки і стояка. Наступні групи можуть приєднуватися до будь-яких ланок одержаного механізму тільки так, щоб ланки групи могли рухатися відносно одна одної. Неможна групу вільними елементами приєднувати до одної ланки, оскільки у цьому випадку отримаємо нерухомий контур.
Структурні групи плоских механізмів задовольняють умову
Wrp = 3n 2p5 p4 = 0,
структурні групи просторових механізмів
Wrp = 6n 5р5 4р4 3p3 2р2 p1 = 0.
Як плоскі, так й просторові структурні групи використовуються не тільки при структурному синтезі, але й при аналізі механізмів.
4.4 Приклад структурного аналізу кривошипно-коромислового механізму (рисунок 4.11)
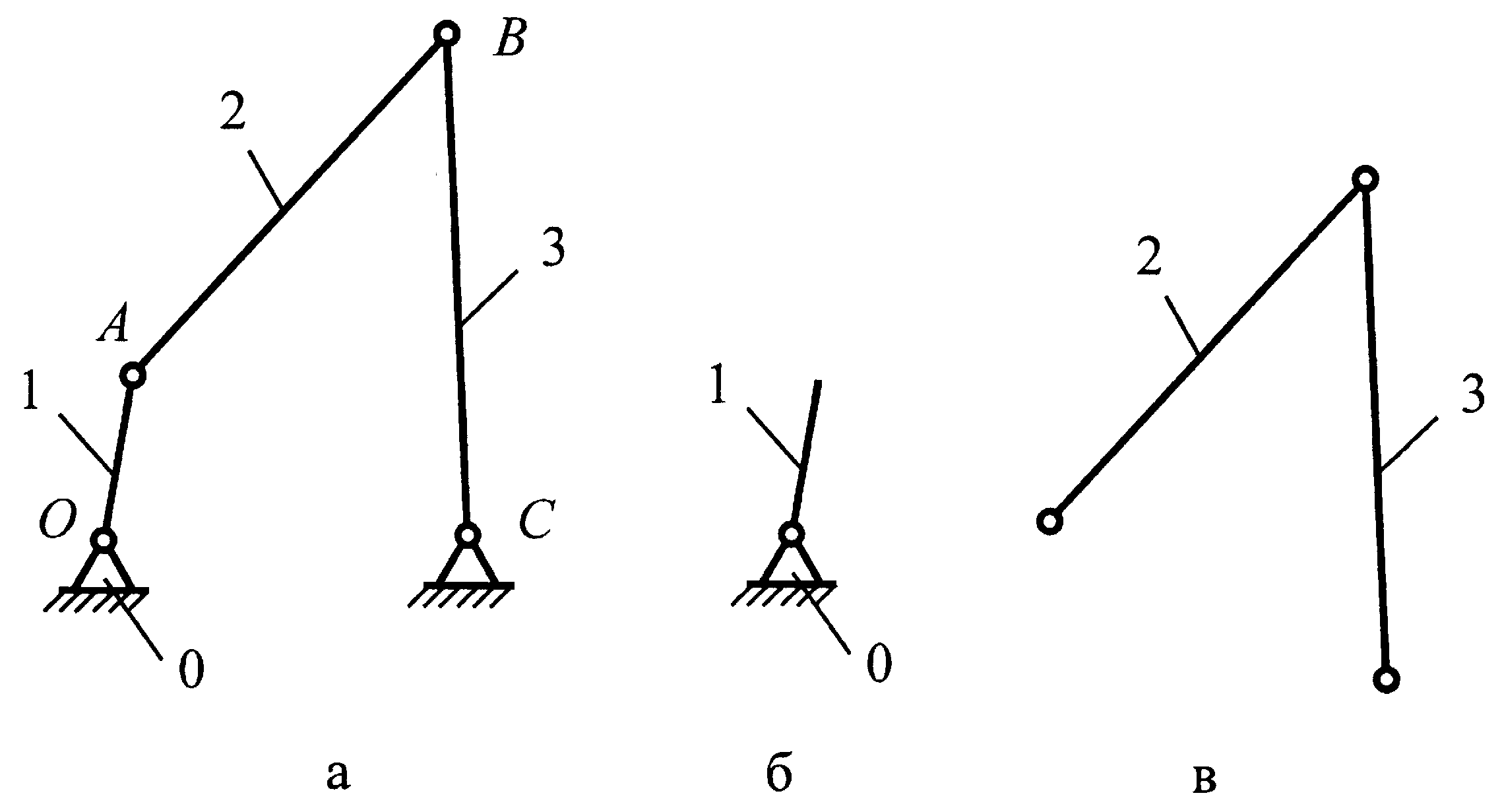
Рисунок 4.11 – Кривошипно-коромисловий механізм
1) Нумеруємо ланки. Стояк завжди нумерується цифрою 0, кривошип – 1. Далі нумерація проводиться в напрямі від механізму I класу до стояка.
Механізм складається зі стояка 0, кривошипа 1, шатуна 2, коромисла 3. Кількість рухомих ланок механізму n = 3.
2) Позначаємо кінематичні пари. Пара між стояком і кривошипом позначається великою літерою О. Наступні пари позначаються по порядку в напрямі від механізму I класу до стояка великими літерами латинського алфавіту: А, В, С, D, E, F, G, H, …
Кінематичні пари: 0-1, 1-2, 2-3, 3-0. Всі пари нижчі, плоскі, однорухомі, тобто 5-го класу. Їх кількість p5 = 4; кінематичні пари 4-го класу відсутні, тобто p4 = 0.
3) Визначаємо число ступенів рухомості плоского механізму за структурною формулою Чебишева:
W = 3n – 2p5 – p4 = 33 - 24 – 0 = 1.
4) Виділяємо механізм I класу (рисунок 4.11, б) та групу Ассура (рисунок 4.11, в).
5) Формула будови механізму:
I клас (0,1) II клас (2,3).
Маємо механізм II класу.
ЛЕКЦІЯ 4 (продовження)