

Лекція 3 Структура механізмів
План лекції
3.1 Кінематичні ланцюги та їх класифікація.
3.2 Структурні формули кінематичних ланцюгів.
3.3 Види механізмів
3.1 Кінематичні ланцюги та їх класифікація
Сукупність ланок, з'єднаних між собою кінематичними парами, називається кінематичним ланцюгом.
Кінематичні ланцюги поділяються на плоскі і просторові, розімкнені і замкнені, прості і складні.
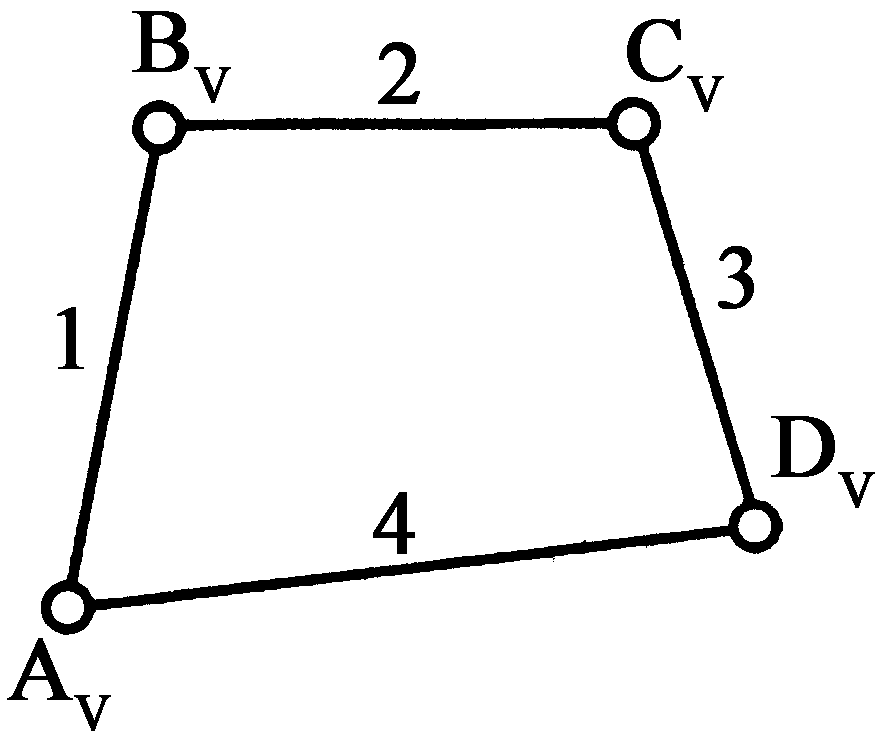
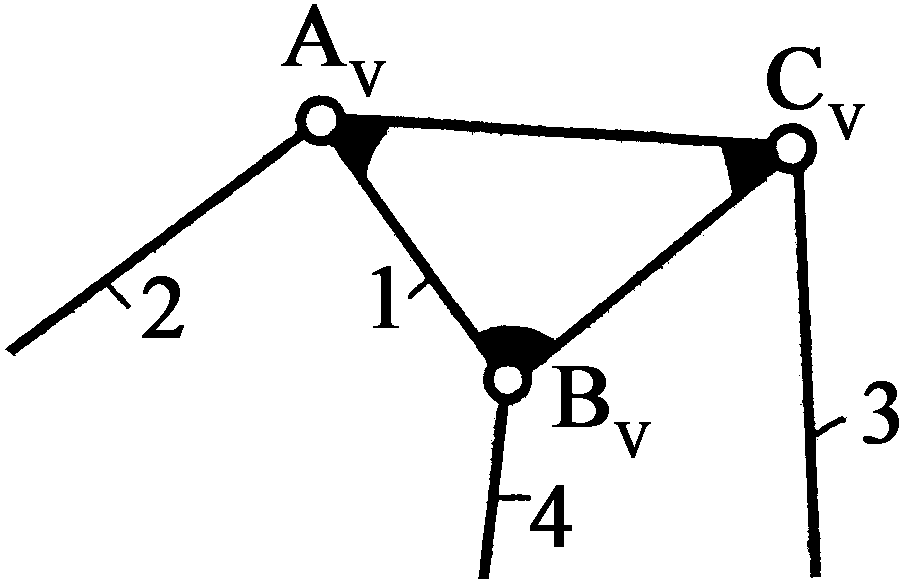
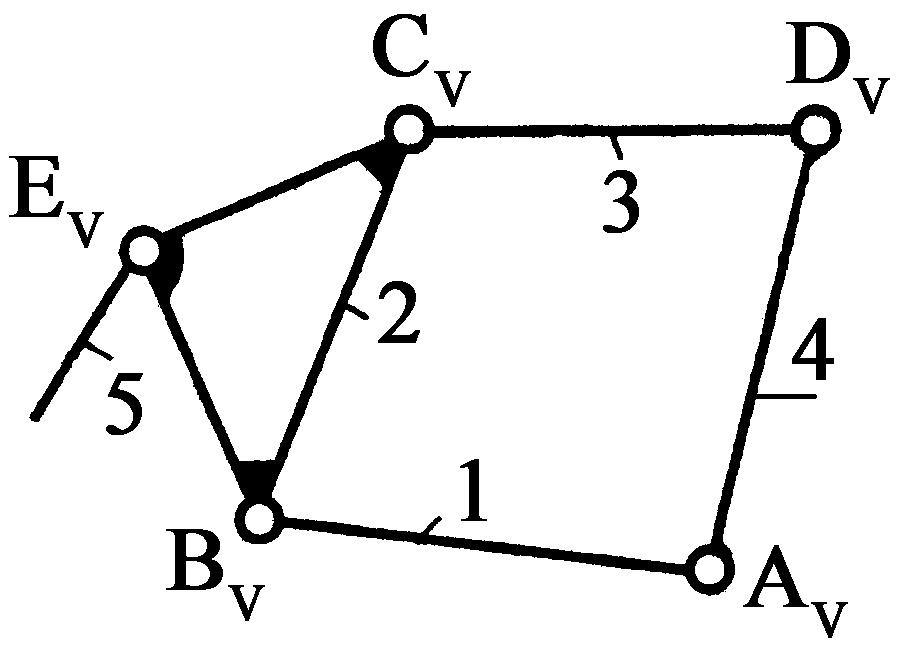
Плоским називають ланцюг, у якому всі точки ланок описують траєкторії, що лежать в одній або паралельних площинах. Цієї умові задовольняють кінематичні ланцюги, що наведені на рисунках 3.1 – 3.4.
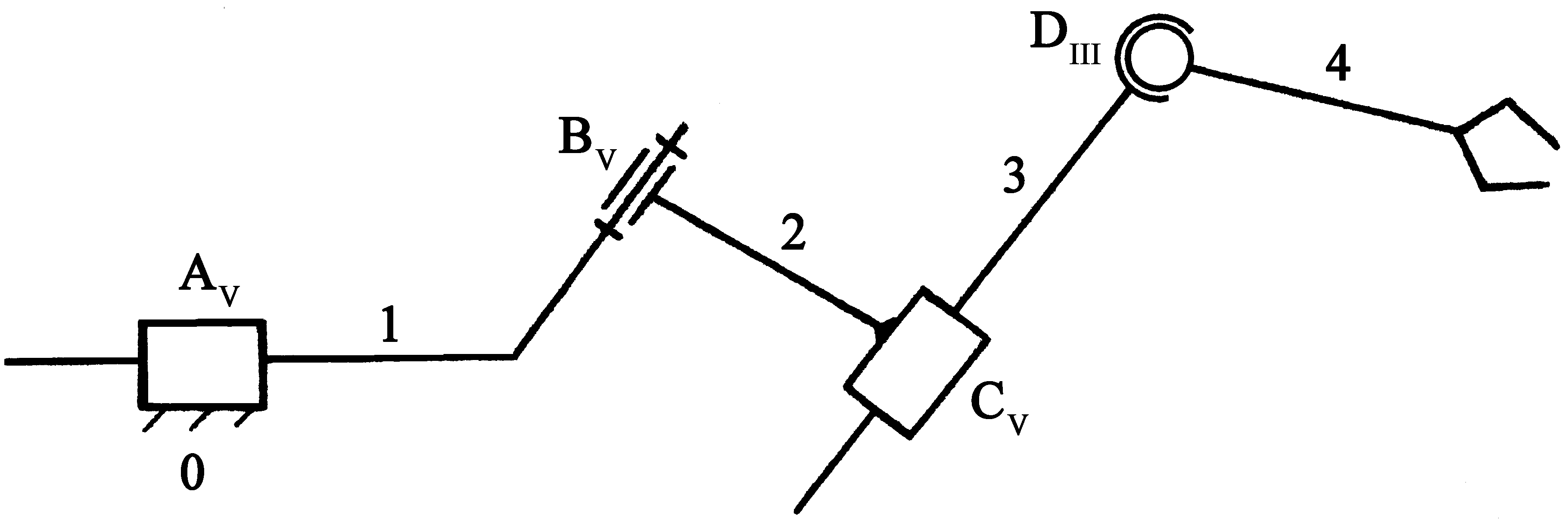
Якщо точки ланок кінематичного ланцюга описують неплоскі траєкторії або траєкторії, що розташовані на поверхнях, що перетинаються між собою, то кінематичний ланцюг називається просторовим. Просторові кінематичні ланцюги використовуються при проектуванні механізмів маніпуляторів і роботів (рисунок 3.5).
|
|
Рисунок 3.1 Плоский простий незамкнений кінематичний ланцюг |
Рисунок 3.2 Плоский простий замкнений кінематичний ланцюг |
|
|
Рисунок 3.3 Плоский складний незамкнений кінематичний ланцюг |
Рисунок 3.4 Плоский складний незамкнений кінематичний ланцюг |
|
|
Рисунок 3.5 – Просторовий простий розімкнений кінематичний ланцюг |
|
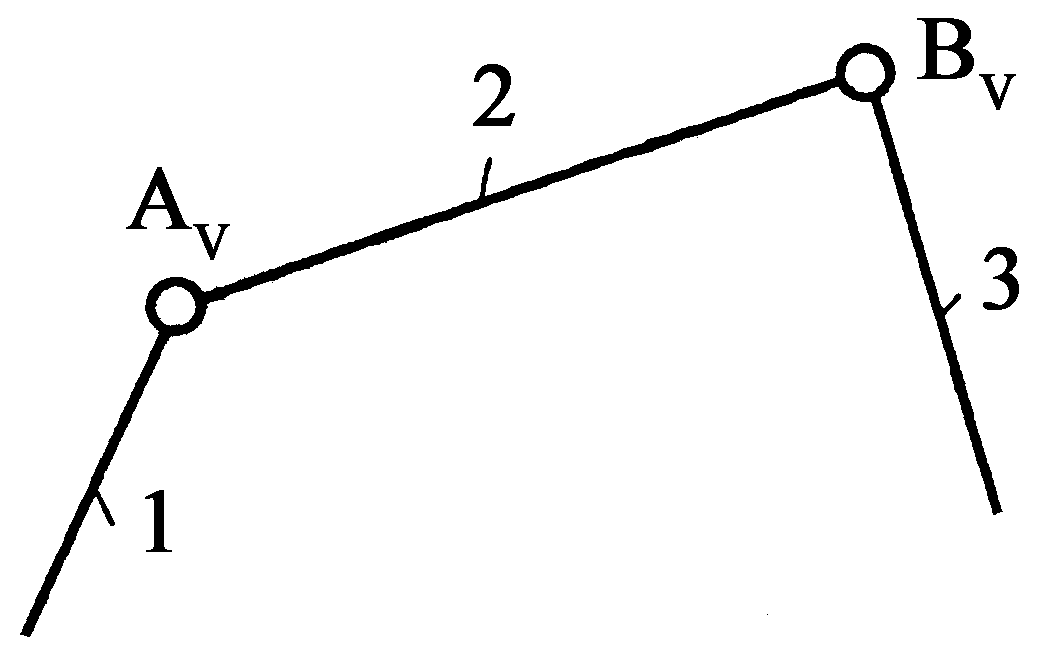
Незамкненим кінематичним ланцюгом називають такий, у якому є хоч би одна ланка, що входить до одної кінематичної пари.
У замкненому кінематичному ланцюзі кожна ланка входить не менш, ніж до двох кінематичних пар (рисунок 3.2).
Простий кінематичний ланцюг такий, в якій кожна ланка входить не більш, ніж до двох кінематичних пар (рисунки 3.1; 3.2; 3.5), а складний, у якому є хоч би одна ланка, що входить більш, ніж до двох кінематичних пар (рисунки 3.3; 3.4).
З точки зору кінематичного ланцюга механізмом називають замкнений кінематичний ланцюг з одною нерухомою ланкою.
Усі нерухомі деталі утворюють одну нерухому систему тіл, яка називається нерухомою ланкою або стояком. Наприклад, корпус двигуна внутрішнього згоряння, підшипники корінного вала тощо разом утворюють одну нерухому ланку, або стояк.
У будь-якому механізмі або машині маємо одну нерухому ланку і одну або декілька рухомих ланок.
Наприклад, колінчастий вал кривошипно-поршневого двигуна разом з нерухомим підшипником утворює одну кінематичну пару О (рисунок 3.6,с). Шатун з колінчастим валом утворює другу кінематичну пару А, шатун з поршнем третю (шарнір В), поршень з циліндром четверту, а всі ці ланки і кінематичні пари разом утворюють кінематичний ланцюг.
Рисунок 3.6 – Приклад утворення кінематичного ланцюга
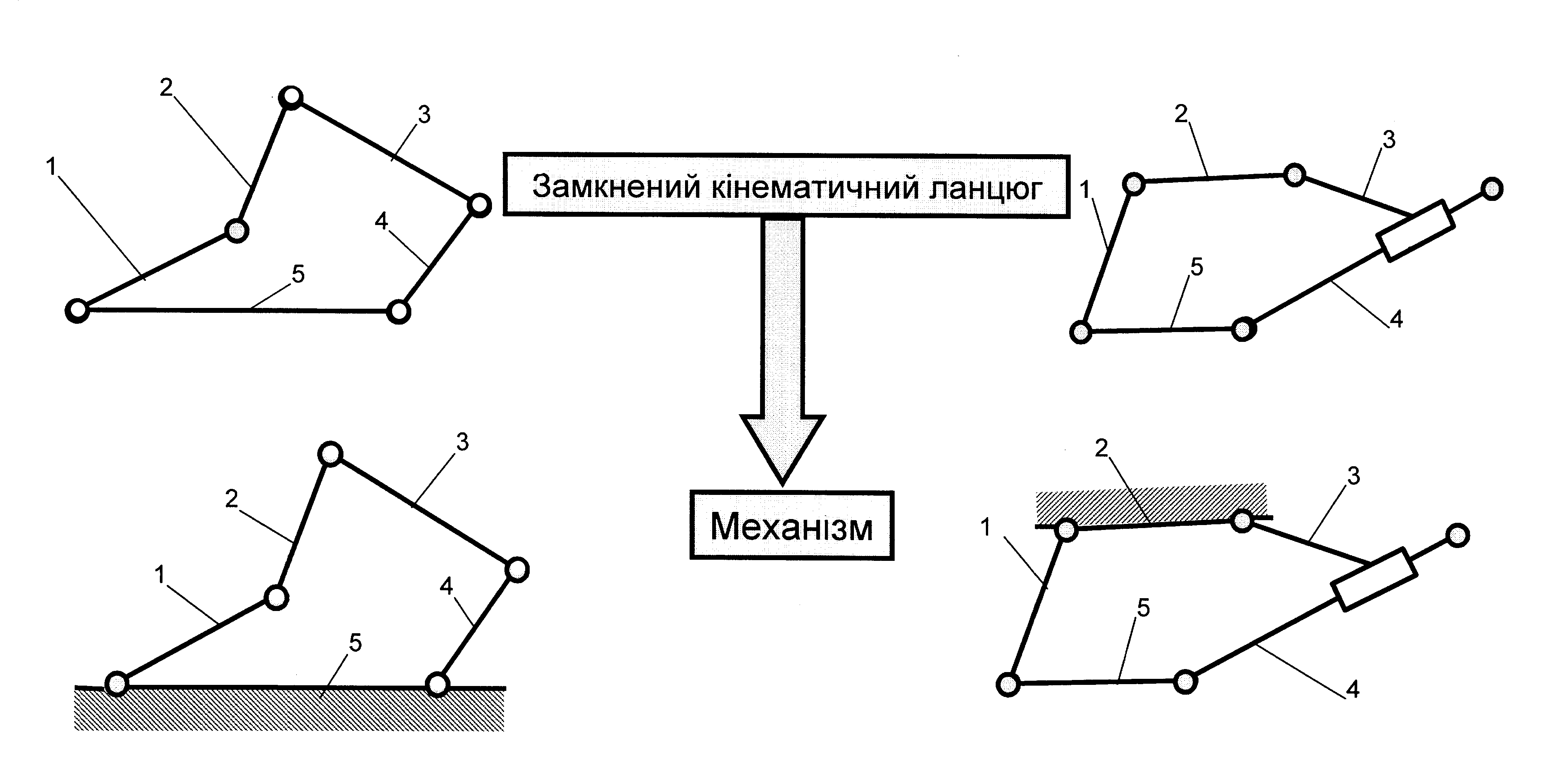
Рисунок 3.7 – Замкнений кінематичний ланцюг – механізм
Як правило, у механізмі є один вхід і один вихід. Вхідна ланка одержує рух від двигуна, а вихідна зв'язана з робочим (виконавчим) органом машини. Але можуть бути механізми, в яких є кілька вхідних і вихідних ланок. Наприклад, у автомобільному диференціалі є один вхід рух від двигуна, і два виходи два колеси.