

2.2.1 Конструкції на основі типових складових частин машин. Типові механічні передачі.
Більшість сучасних машин і приладів створюються за схемою: двигун – передача – робочий орган, тобто складаються з рушійних, передатних та виконавчих механізмів як показано на структурній схемі (рисунок 3.4). Проте найбільш загальними для всіх машин є передатні механізми, на відміну від рушійних та виконавчих які мають багато специфічних деталей.
|
Рисунок 3.4 – Структурна схема будова машини
|
Необхідність застосування передач обумовлена наступними факторами:
для вибору оптимальної швидкості руху;
для регулювання швидкості руху;
для перетворення виду руху: обертового до поступального (передачі рейкові і гвинтгайка) і навпаки;
для зміни напряму руху (реверсування);
для зміни крутних моментів і сил руху;
для передавання потужності на відстані.
Передача механічної енергії найзручніше здійснюється обертовим рухом, який може бути неперервним та мати велику швидкість обертання.
Для передачі енергії за допомогою обертового руху в основному застосовують передачі, вали і муфти.
Механічні передачі обертового руху називають іще просто передачами (інші види передач – гідравлічні, пневматичні і т.д. – в курсі деталей машин не розглядаються).
Отже, передачі це механізми, що призначені передавати енергію з одного вала на інший, при тому, як правило, зі зміною, тобто зменшенням кутових швидкостей або їх збільшенням і відповідною зміною сил та крутних моментів. У деяких механізмах передачі застосовують для перетворення виду або закону руху.
Передачі обертового руху поділяються на передачі з безпосереднім контактом тіл обертання (рисунки 3.5; 3.8; 3.9) і передачі з гнучкою пов'яззю (рисунки 3.6; 3.7), в яких тіла обертання зв'язані між собою гнучкою ланкою (елементом). До перших належать фрикційні (рисунок 3.5, а і б), зубчасті (рисунки 3.8; 3.10; 3.11) та черв'ячні (рисунок 3.9), а до других пасові і ланцюгові (рисунки 3.6; 3.7).
|
|
|
||
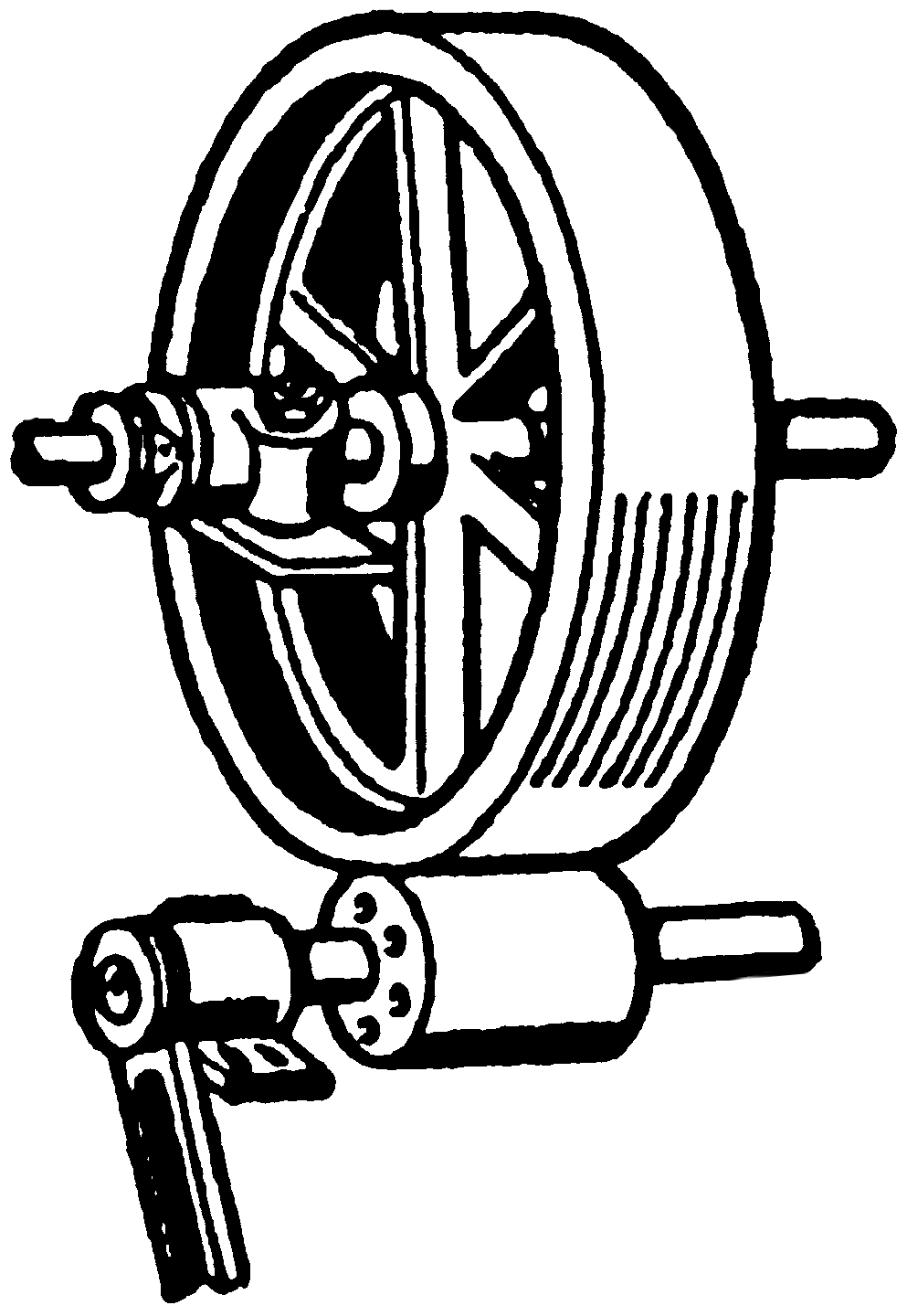
а) б) Рисунок 3.5 – Фрикційні передачі а) – передача від одного циліндричного катка до іншого; б) – передача з конічними фрикційними котками, коли осі валів перетинаються |
|
|||
|
|
|||
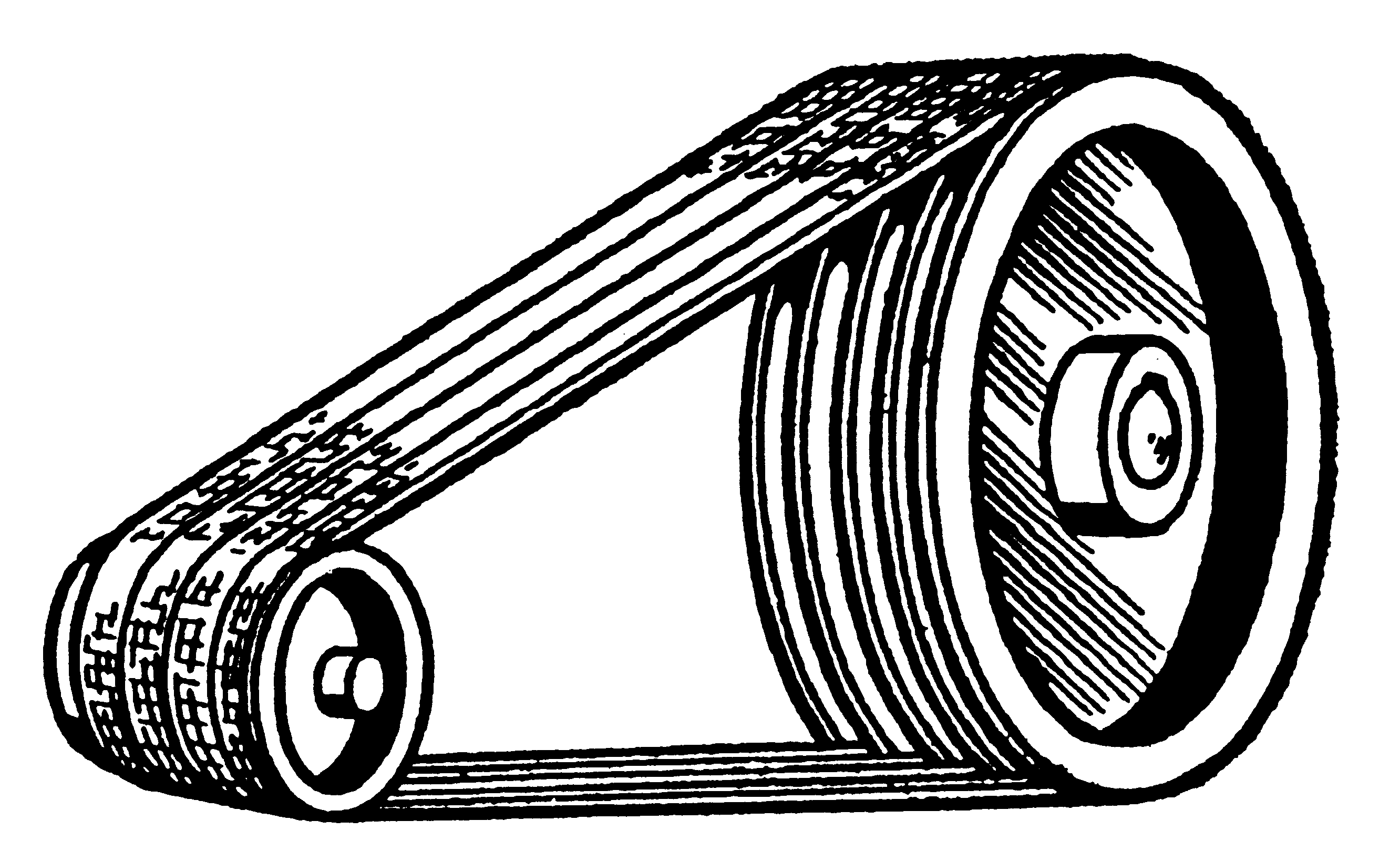
Рисунок 3.6 – Клинопасова передача |
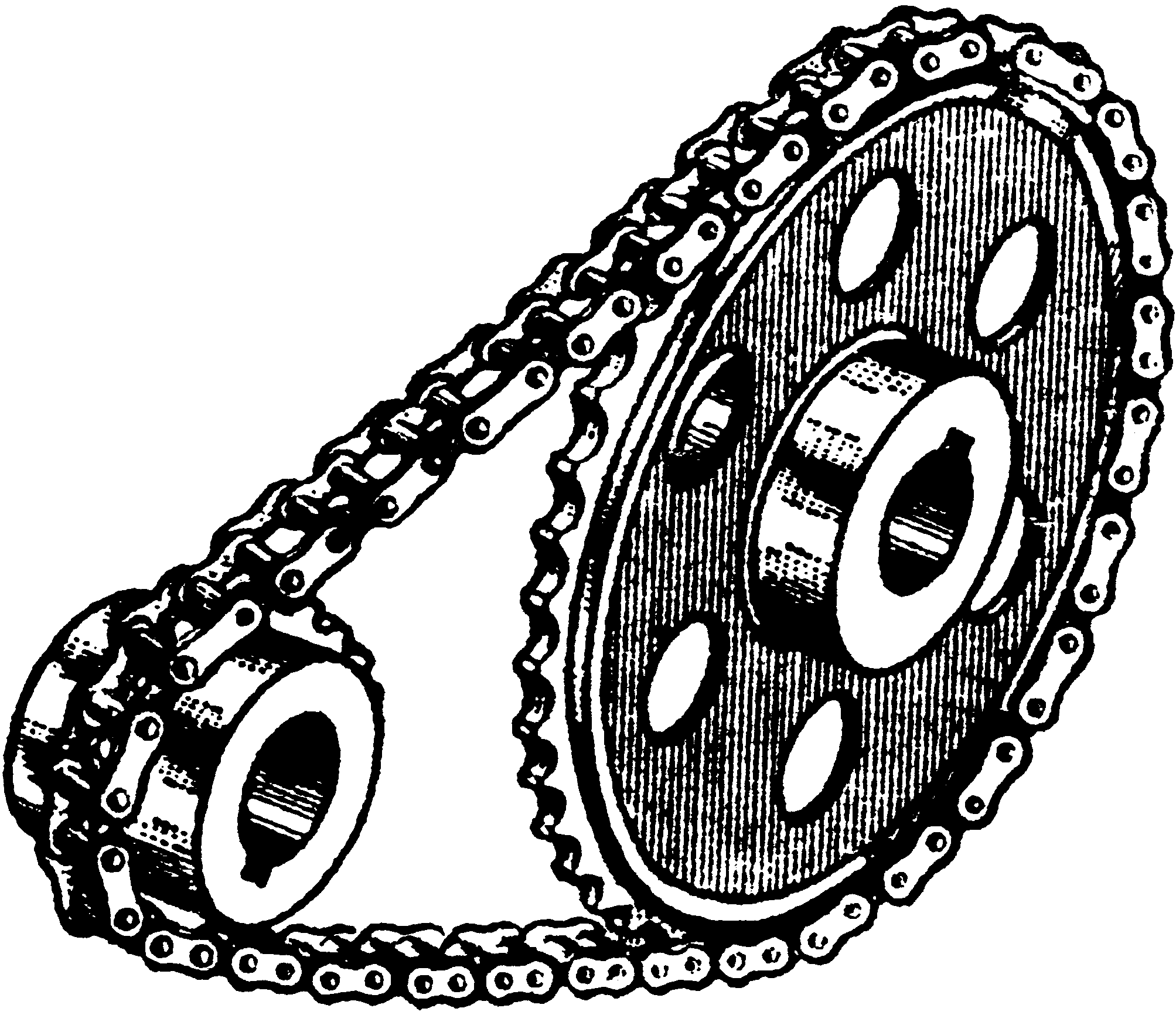
Рисунок 3.7 – Ланцюгова передача |
|||
|
|
|||
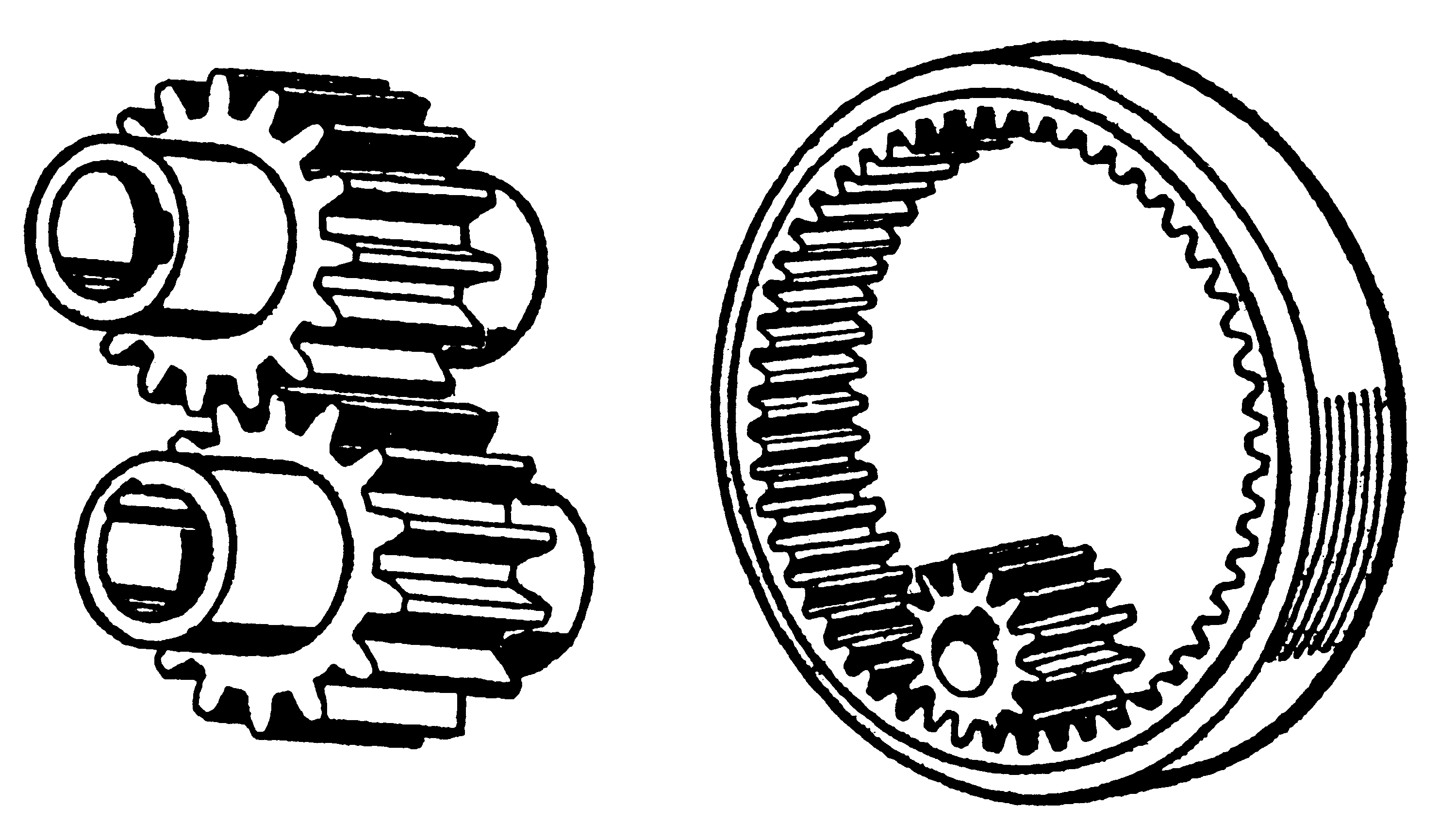
Рисунок 3.8 – Зубчаста циліндрична передача |
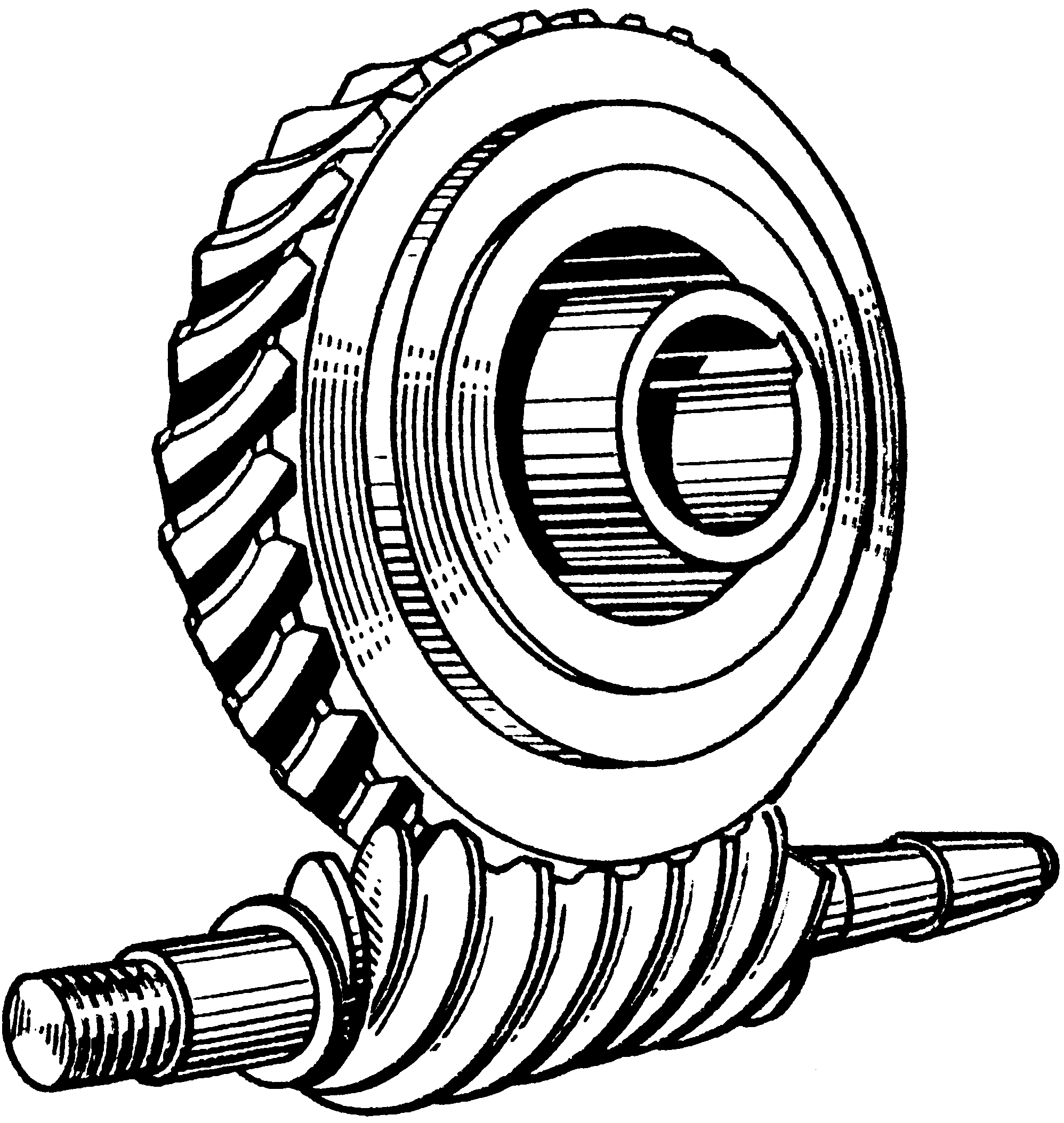
Рисунок 3.9 – Черв’ячна передача |
|||
Залежно від способу передачі руху від ведучої ланки до веденої, розрізняють передачі тертям (рисунки 3.5; 3.6;) і передачі зачепленням (рисунки 3.7; 3.8; 3.9; 3.10; 3.11). Перші передачі пасові та фрикційні, другі зубчасті, черв'ячні і ланцюгові.
Залежно від розміщення валів у просторі обертовий рух може передаватися паралельними (рисунки 3.5,а; 3.6; 3.7; 3.8; 3.10, а,б), співвісними (рисунок 3.11), мимобіжними (рисунки 3.9; 3.10, в, д) або валами, що перетинаються (рисунки 3.5, б; 3.10, г).
|
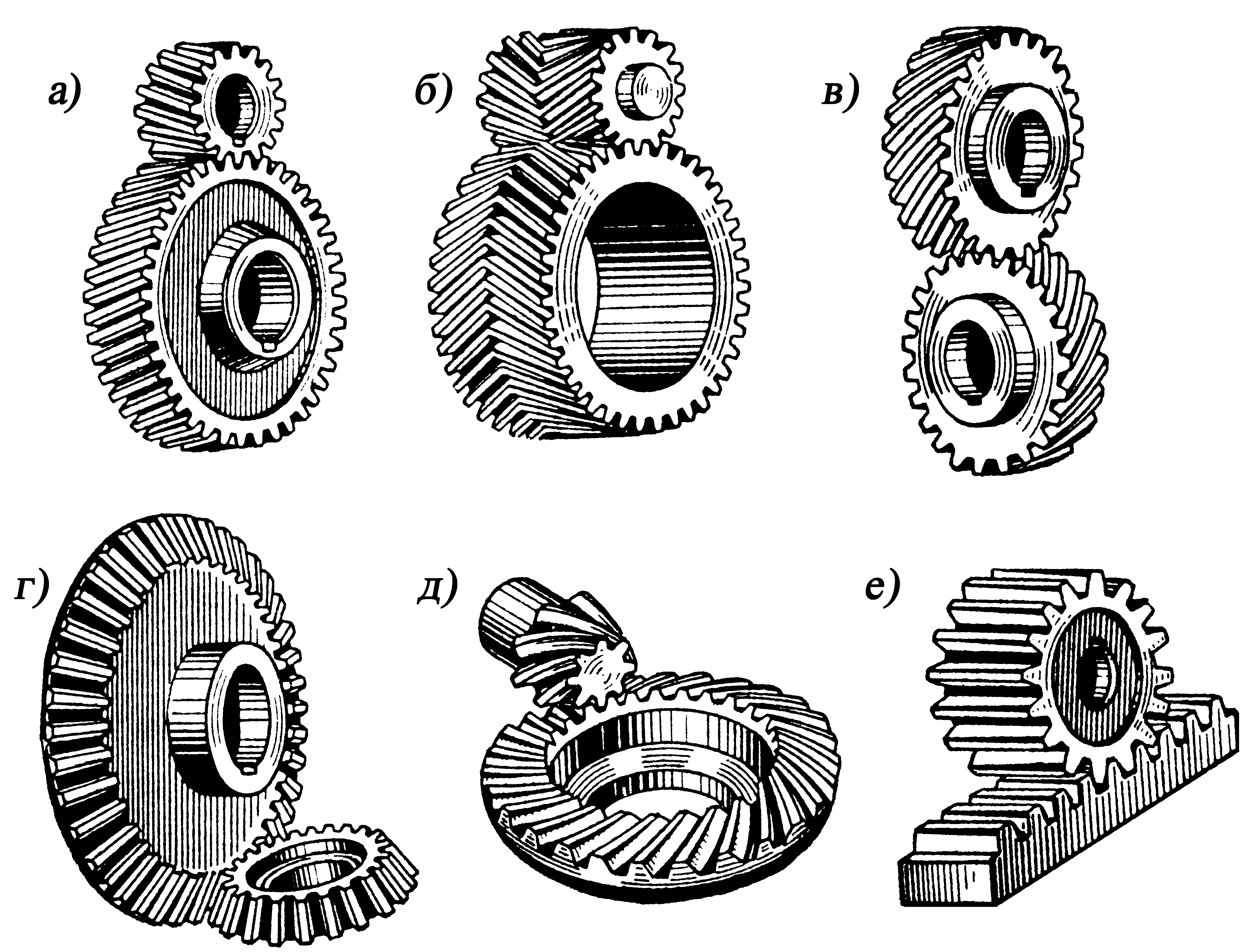
Рисунок 3.10 – Види зубчастих передач а) – косозуба циліндрична з паралельними осями; б) – шевронна циліндрична з паралельними осями; в) – гвинтова циліндрична з мимобіжними осями; г) – конічна прямозуба з осями, що перетинаються; д) – гіпоідна або конічна гвинтова з мимобіжними осями; е) – рейкова передача |
За характером руху валів розрізняють:
прості передачі, в яких вали обертаються лише навколо своїх осей, а осі валів та спряжені з ними деталі залишаються у просторі нерухомими, і
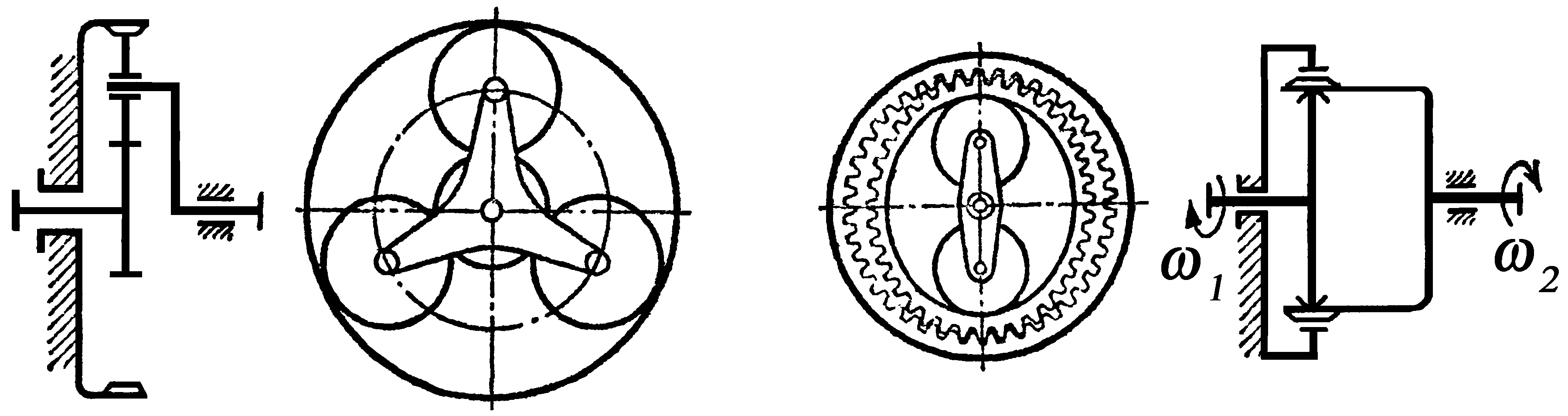
планетарні, в яких вісі та спряжені з ними деталі (сателіти) переміщуються у просторі. Є ще хвильові передачі як різновид планетарних. Планетарні передачі складаються як із зубчастих, так і з фрикційних коліс, у якій геометрична вісь хоча б одного з коліс рухома. Найбільше розповсюдження отримали зубчасті планетарні передачі (рисунок 3.11).
|
а) б) Рисунок 3.11 – Кінематична схема: а) – планетарної зубчастої передачі; б) – хвильової зубчастої передачі |
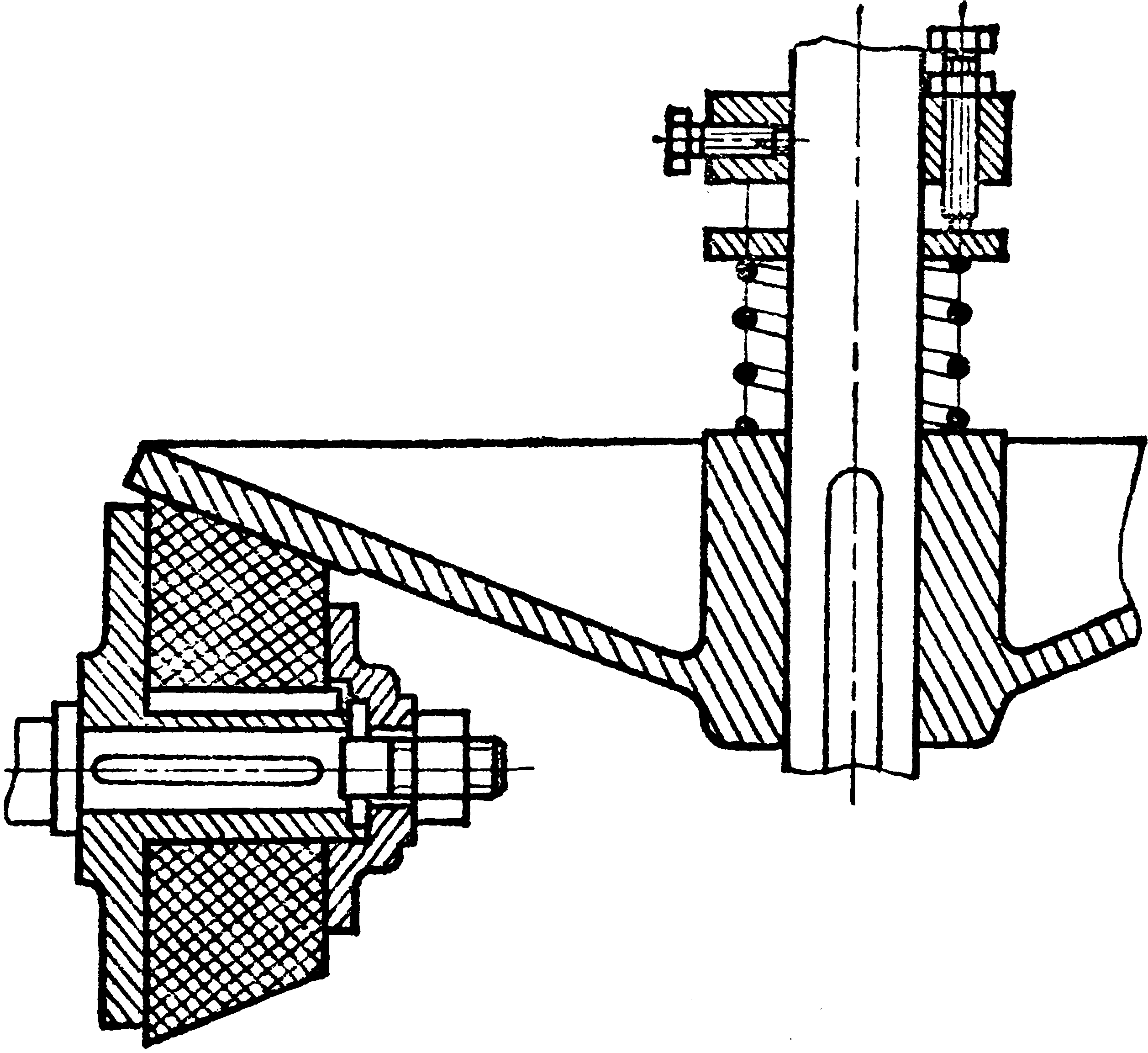
Передача “гвинт-гайка” (рисунок 3.12) належить до тих, що перетворюють вид або закон руху, в даному разі перетворює обертовий рух на поступальний.
|
Рисунок 3.12 – Приклад застосування передачі гвинт-гайка у домкратах (ліварах) |
За конструктивним оформленням передачі можуть бути відкритими, бо не мають спільного корпуса, і закритими, тобто розміщені в спільному корпусі, який забезпечує герметичність та постійне змащення передачі.
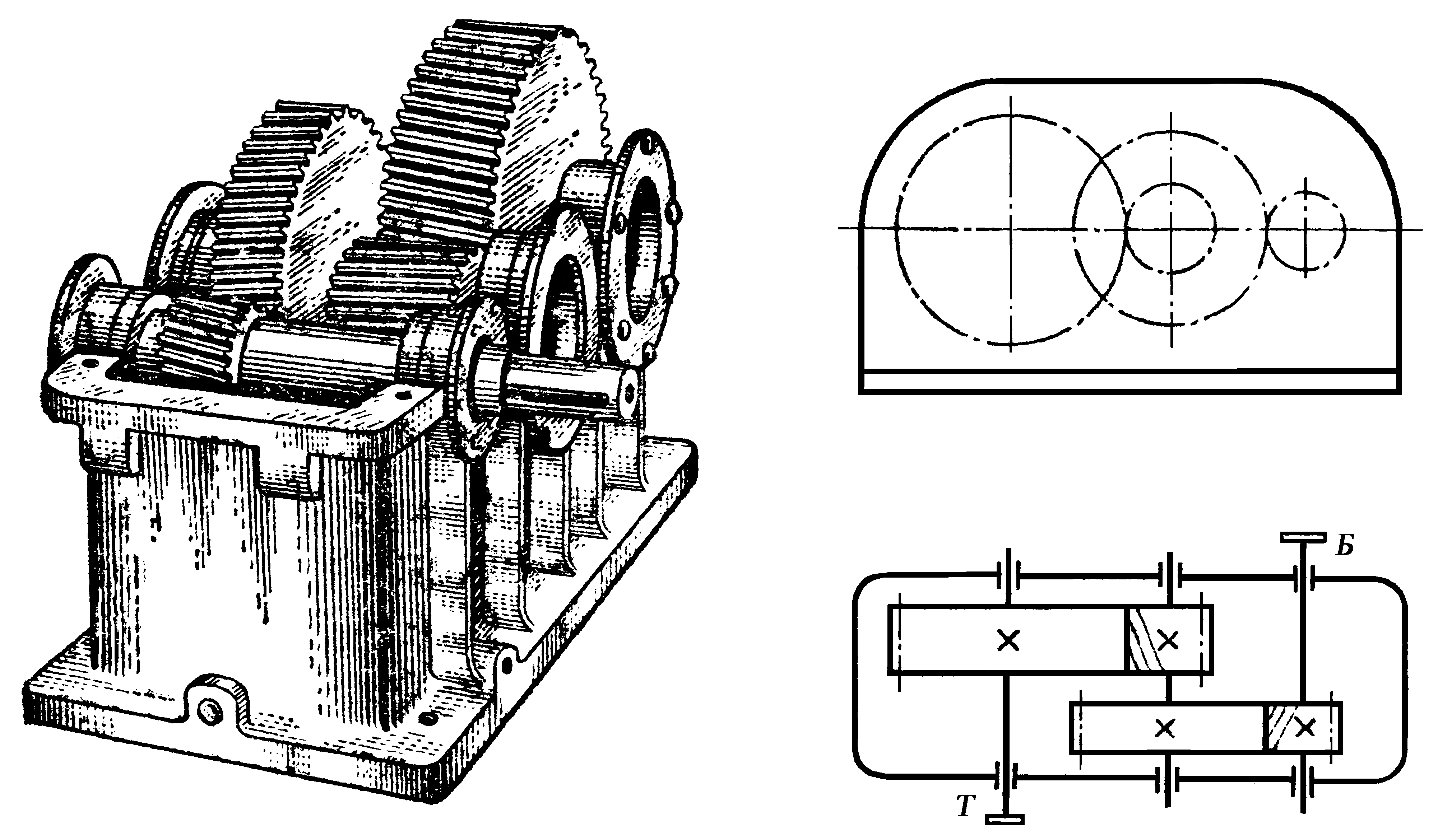
Передача, що встановлена в закритому корпусі й призначена для зниження кутової швидкості і підвищення крутного моменту на веденому валу, називається редуктором (рисунок 3.13). Встановлення передачі в окремому корпусі гарантує точність складання, краще мащення, більш високий коефіцієнт корисної дії (ККД), менше зношування, а також захист від попадання до неї пилу й бруду. Тому замість відкритих передач у всіх відповідальних установках застосовують редуктори.
|
а) б) Рисунок 3.13 – Двоступінчастий редуктор з циліндричними косозубими зубчастими колесами а) – редуктор із знятою кришкою; б) – кінематична схема редуктора: Б – вхідний, бистрохідний вал редуктора; Т – вихідний, тихохідний вал |
Передача, що розміщена в окремому корпусі й призначена для підвищення кутової швидкості веденого валу, називається пришвидшувачем або мульти-плікатором.
Залежно від кількості окремих передач, які взаємно пов'язані в перетворенні руху як одна передача, розрізняють передачі одноступінчасті та багато-ступінчасті однорідної та неоднорідної структур. Наприклад, передача зубчаста закрита одноступінчаста, або передача зубчаста закрита дво-, три-, чотири- та п'ятиступінчаста.