

Призначення та загальна будова навігаційної апаратури
Навігаційна апаратура призначена для виконання топогеодезичної прив'язки по карті позицій, пунктів і постів бойових порядків артилерії.
Крім того, вона може бути використана для водіння колон вночі й в інших умовах, важких для орієнтування, нанесення на карту не позначених на ній доріг і колонних шляхів і передачі дирекційних кутів орієнтирних напрямків.
Робота навігаційної апаратури по визначенню координат точок, що прив'язуються, грунтується на безперервному послідовному автоматичному рішенні прямої геодезичної задачі.
Розглянемо принцип визначення координат точок місцевості за допомогою навігаційної апаратури.
Нехай пересувний розвідувальний пункт рухається по довільному маршруту від початкової точки О, координати якої х0і у0відомі. На цій же точці визначається дирекційний кут повздовжньої осі ПРП. Потрібно визначити координати х2і угточки 2, що прив'язується.
 Візьмемо
на маршруті точку 1
так
близько до крапки О, щоб відрізок Д5,
можна
було вважати прямолінійним.
Візьмемо
на маршруті точку 1
так
близько до крапки О, щоб відрізок Д5,
можна
було вважати прямолінійним.
Дирекційний кут а, першого відрізка шляху буде відповідати дирекційному куту повздовжньої осі машини на початковій точці. Прирости координат Дх, і Ду, точки 1 щодо початкової точки О можуть бути обчислені по формулах:
Δх1 = ΔS1, соs а1
Δу1 = ΔS, sin a1
Підсумовуючи ці прирости координат з координатами початкової точки, можна визначити координати точки 1:
Х1 = х0 + Δх,
У1=Уо+ΔУ1
У крапці 1 дирекційний кут напрямку руху машини змінюється на деяку величину Δa2. Дирекційний кут відрізка ДS1, можна одержати по формулі
аг = a1 + Δаг
По цьому дирекційному куту і довжині відрізка ΔS2 обчислюють прирости координат, а потім і координати точки 2:
Δх2 = ΔS2 соs а2; Δу2= ΔS2 sinа2;
Х2 =х1 + Δх2; у2 = у1 + Δу2.
Формули, по яких визначаються координати п-ї точки маршруту, у загальному вигляді можна записати так:
Хn = хn-1 + Δхn; уn = уn-1 + Δуп.
де Δхn=ΔS соs an; Δуn = ΔS sin аn;
аn = аn-1 + Δаn
Ці формули складають математичну основу роботи навігаційної апаратури. Всі обчислення по них виконуються автоматично.
Блок-схема навігаційної апаратури.
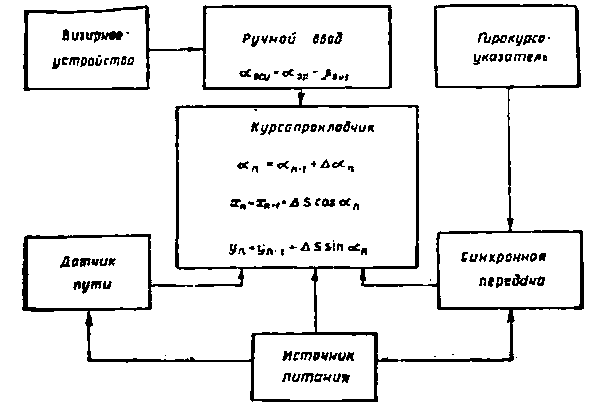
До складу навігаційної апаратури входять:
датчик шляху;
гірокурсо-вказівник;
курсопрокладчнк;
візирний пристрій;
синхронна передача",
- джерела живлення, прилади електроустаткування, запасні частини н інструменти.
Взаємозв'язок основних приладів навігаційної апаратури показаний на малюнку.
В існуючих типах навігаційної апаратури для виміру шляху використовується електронний (ЗДП) або механічний (МДП) датчик шляху.
Блок-схема електронного датчика шляху.
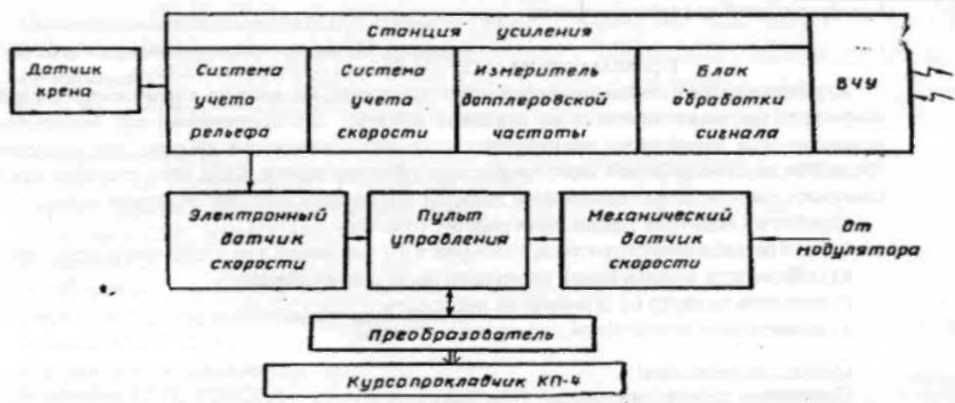
Електронний датчик шляху являє собою радіотехнічний пристрій, що забезпечує визначення пройденого шляху без кінематичного зв'язку з ходовою частиною машини. Принцип роботи датчика заснований на використанні ефекту Доплера, що полягає в зміні частоти сигналу при підносному переміщенні джерела і приймача випромінювання.
До складу електронного датчика шляху входять високочастотний пристрій, станція посилення, пульт управління, перетворювач і датчик крену.
Від генератора надвисокої частоти через передавальну антену енергія частотою /0
направляється вузьким пучком до землі вперед по ходу руху машини. Якщо машина нерухома, частота випромінюваного і частота прийнятого сигналу рівні, тому що земля і приймач, розташований на машині, не переміщаються відносно один одного. При русі машини внаслідок ефекту Доплера частота відбитого від землі сигналу /, буде відрізнятися від частоти випромінюваного сигналу /0 на деяке значення, пропорційне швидкості руху машини. Це значення надходить з високочастотного пристрою в блок обробки сигналу станції посилення, де проводяться його попереднє посилення, фільтрація й обмеження.
Оброблений сигнал надходить на вимірник доплерівської частоти. З вимірника частоти в схему подається поправка на швидкість руху машини, що обумовлюється тим що при русі машини з різними швидкостями виникають помилки у визначенні пройденого шляху які є результатом інструментальних погрішностей вимірника частоти і роботи інших систем датчика. Ця поправка визначається й автоматично враховується для швидкостей 3 км/год і більш.
При русі машини з меншою швидкістю електронний датчик відключається і значення пройденого шляху надходить від механічного датчика в курсопрокладач.
Сигнал доплерівської частоти, виправлений на швидкість руху машини, надходить далі в схему обліку рельєфу місцевості.
Сформований і приведений до визначеного масштабу з урахуванням корекції швидкості машини і рельєфу місцевості сигнал надходить у перетворювач.
У перетворювачі такі імпульсні сигнали перетворяться в кут повороту вихідного вала, зв'язаного з валиком курсопрокладача. Крім того, перетворювач змінює напрямок введення імпульсів частоти Доплера при русі заднім ходом.
Механічний датчик шляху використовується тільки при русі машини з малими швидкостями (менше 3 км/ч) і при несправному електронному датчику шляху.
У деяких типах навігаційної апаратури він є єдиним датчиком шляху і побудований за принципом автомобільного спідометра.
Для точного обліку значення пройденого шляху необхідно щоб радіус коліс строго відповідав їхньому розрахунковому значенню (зміна радіуса колеса на 1 мм викликає помилку більш ніж на 0,2% шляху). Варто мати на увазі, що механічний датчик шляху не мас схеми обліку виправлення на рельєф місцевості, тобто таким датчиком виміряється похилий.
а не приведений до горизонту шлях.