

2.2. Задатчики параметров микропроцессорной системы управления электровозов эп2к
На пассажирских электровозах ЭП2К применяется реостатное регулирование токов якорей, а управление ими максимально унифицировано с управлением МПСУ электровозов переменного тока. Так, на электровозе ЭП2К применяется ручное и автоматизированное регулирование параметров, как в режиме тяги, так и в режиме электрического (реостатного) торможения.
В режиме автоматизированного управления по двум параметрам применяется тот же принцип, что и на электровозах ЭП1, ЭП1П(М) (см. подразд. 1.2).
Управление осуществляется рукоятками контроллера машиниста КМ-31. Конструкция, габаритные и присоединительные размеры КМ-31 приведены на рис. 2.1. Контроллер машиниста КМ-31 состоит из двух переключателей кулачкового типа: реверсивного с рукояткой 1 и главного с рукояткой 2, задатчика скорости 3, задатчика ступеней ослабления поля 4 и ступенчатого задатчика тока с переключателем 5 (рис. 2.1).
|
|
а |
б |
|
|
в |
г |
Рис. 2.1. Контроллер машиниста КМ-31: а, б, в – конструкция, г – внешний вид |
|
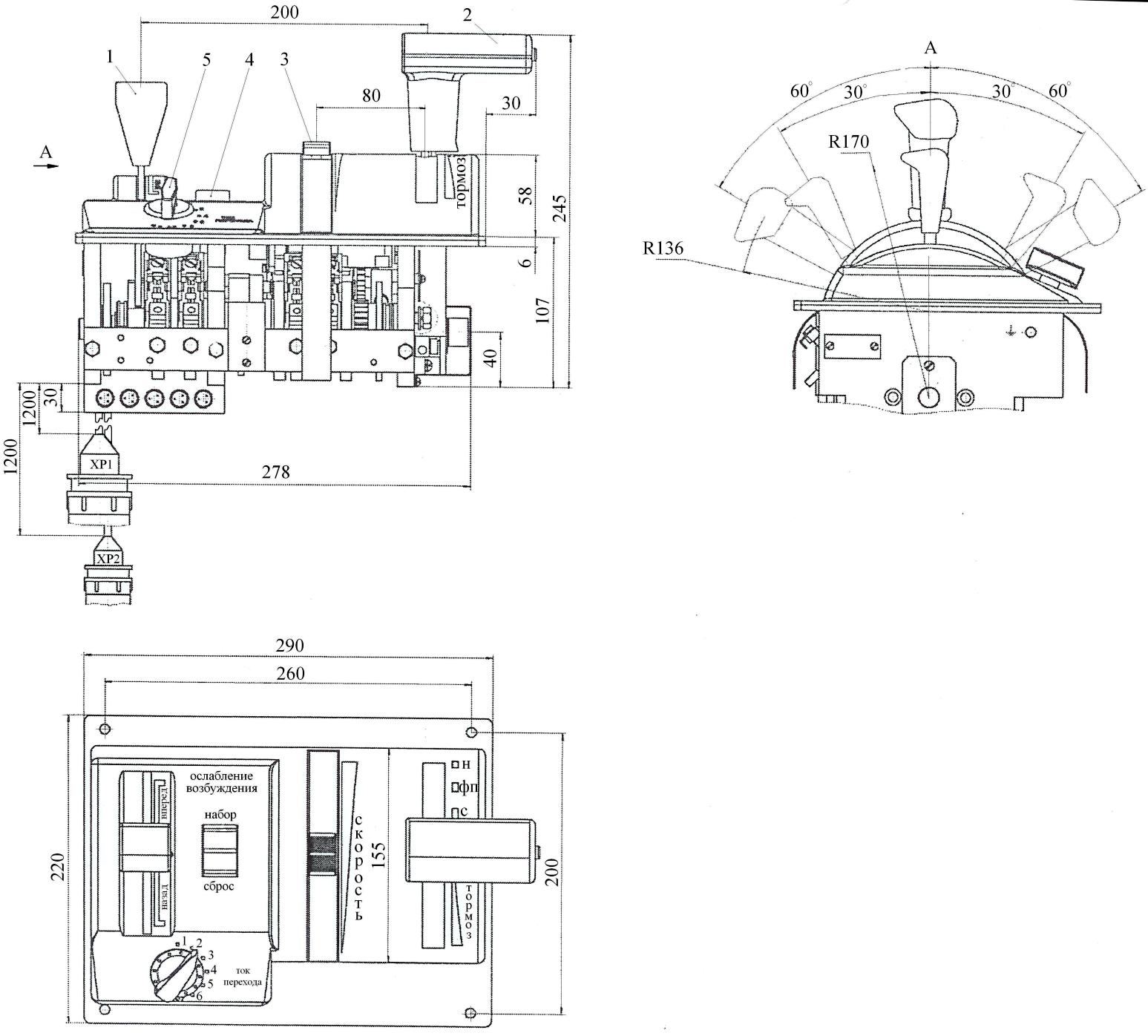
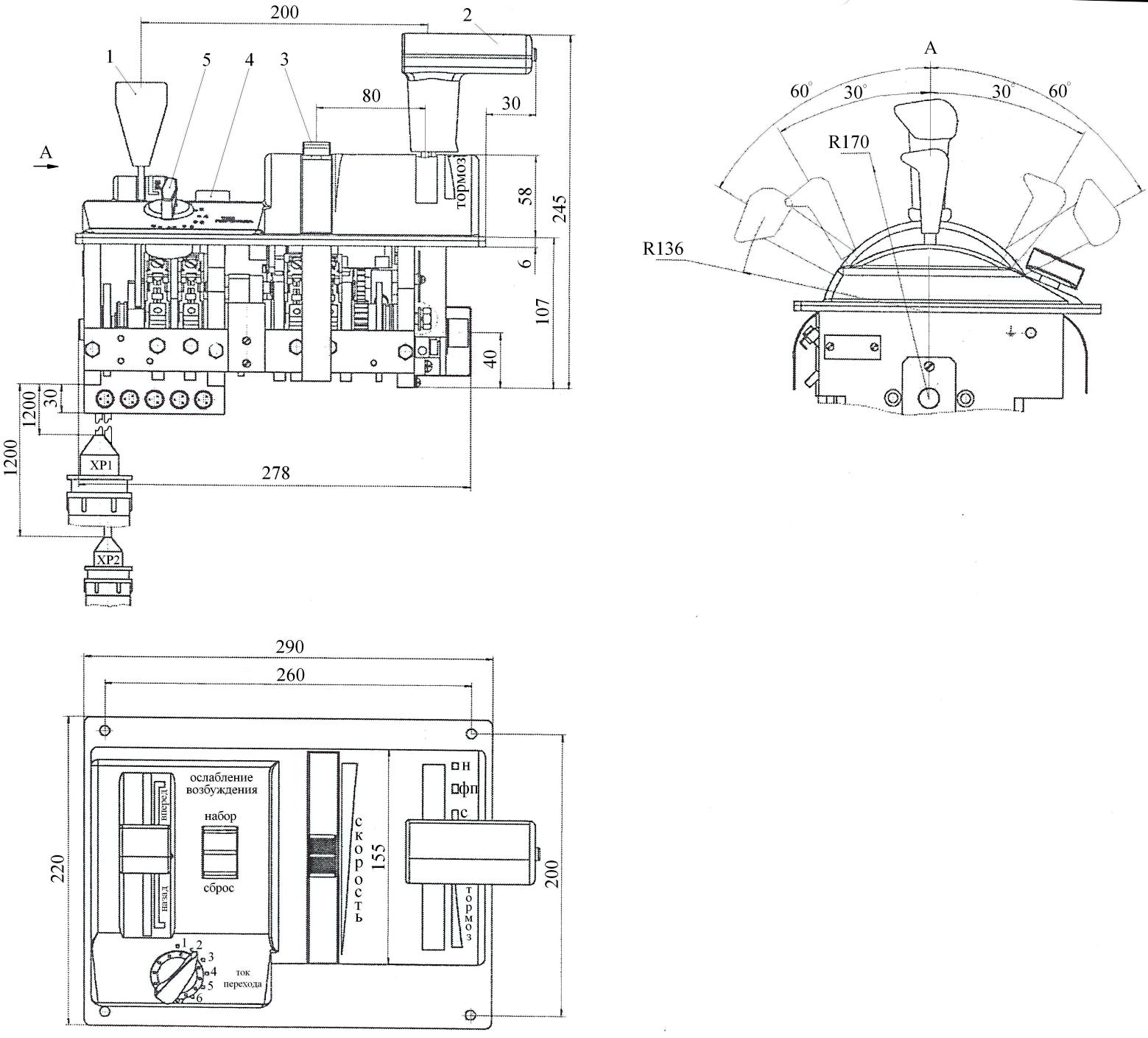
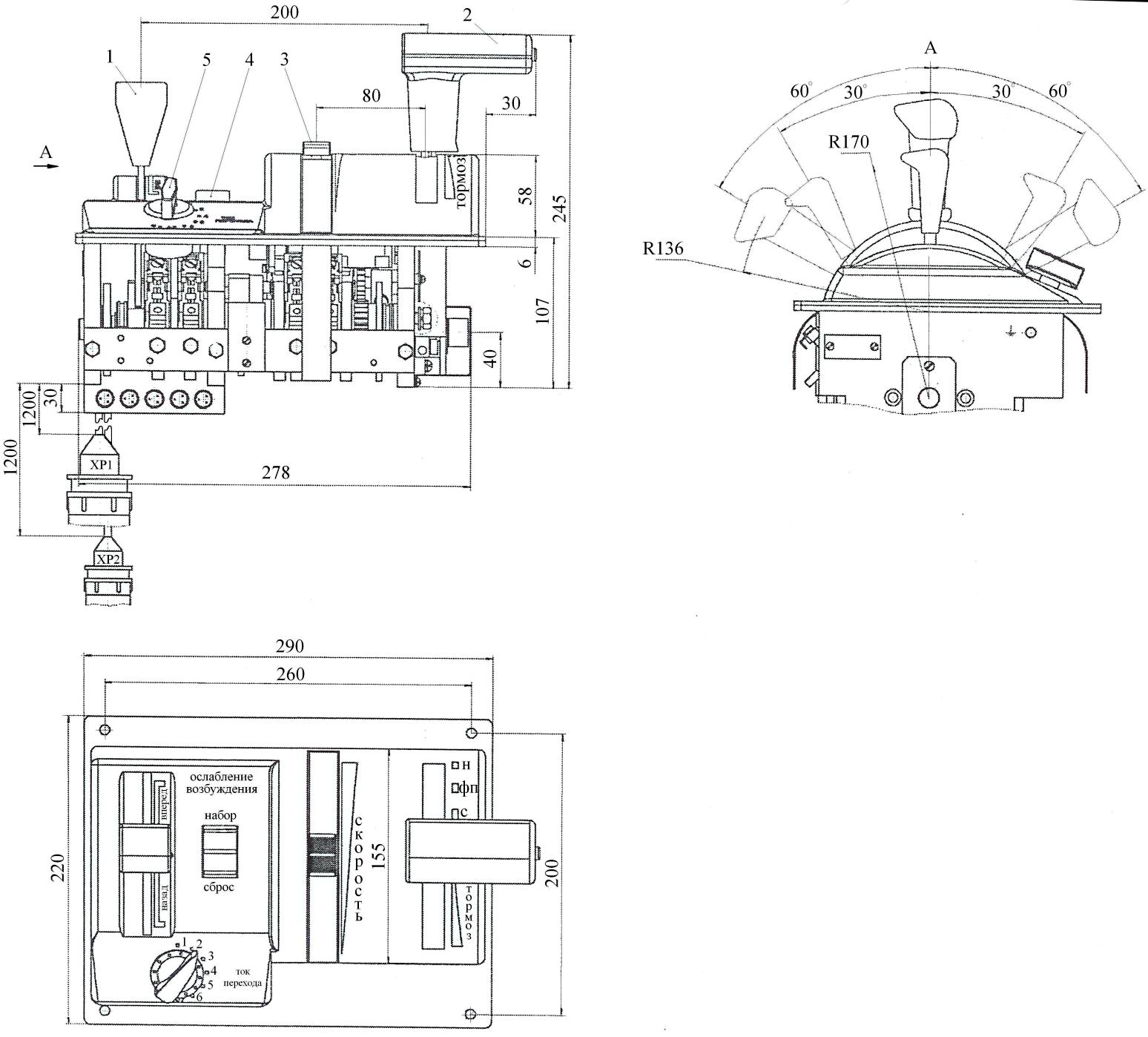

Реверсивный переключатель служит для изменения направления движения электровоза и имеет следующие фиксированные позиции: «В» - вперед, «0» – нулевое положение, «Н» – назад.
Главный переключатель с рукояткой 2 служит для управления электровозом в режимах тяги и реостатного торможения, имеет следующие позиции.
В режиме «Тяга»:
- при движении главной рукоятки 2 вперед: «С» – сборка схемы тяги; «ФП» – фиксация позиций; «Н» – набор позиций;
- в среднем положении: «0» – нулевое положение;
- при движении главной рукоятки 2 назад: «ПТ» – сборка схемы и установка предварительного торможения для сжатия состава; «Тормоз» – зона задания силы реостатного торможения.
Фиксация рукояток на позициях осуществляется при помощи фигурных дисков и пружин.
Задатчик скорости 3 служит для плавного задания скорости в режиме тяги. Рукоятка реверсивного переключателя 1 – съемная в положении «0».
С помощью пакетного переключателя 5 на восемь положений осуществляется ступенчатое задание тока перехода с одной скоростной характеристики электровоза на другую.
Пуск и работа электровоза начинается при последовательном соединении тяговых двигателей. Ходовой (безреостатной) является позиция 19. На этой позиции для дальнейшего увеличения скорости возможно применение ослабления поля тяговых двигателей. Электрической схемой обеспечивается пять ступеней ослабления возбуждения: 80; 66; 54; 46 и 40 % путем нажатия кнопки 4 ослабления поля (см. рис. 2.1). Переход с последовательного на последовательно-параллельное соединение осуществляется на позиции 20 с применением диодного способа.
Ходовой последовательно-параллельного соединения является позиция 36, при которой также возможно применение пяти ступеней ослабления поля.
Переход с последовательно-параллельного соединения тяговых двигателей на параллельное происходит на позиции 37 с применением диодного способа.
Ходовой позицией на параллельном соединении является позиция 49, на которую возможно применение пяти ступеней ослабления поля. Сброс позиций и переходы с одного соединения на другое осуществляются в обратном порядке.
Переход из режима тяги в режим реостатного торможения происходит при обесточенной схеме силовой цепи. Посредством тормозных переключателей происходит отключение тяговых электродвигателей от контактной сети, затем тормозными переключателями производится разделение якорных цепей и цепей обмоток возбуждения. Выполняется переход на независимое возбуждение, формируется схема их трех групп тяговых двигателей (последовательно по два), работающих в генераторном режиме. Каждая группа подключена к своим тормозным резисторам с соответствующими контакторами.
Первая тормозная позиция обеспечивается при полностью введенных тормозных резисторах. Все обмотки тяговых двигателей соединяются последовательно и получают питание от статического преобразователя.
В начале торможения на статический преобразователь подается питание 380 В для предварительного возбуждения тяговых двигателей, которые переходят в генераторный режим. Тормозной ток протекает через пуско-тормозные резисторы, создает в них падение напряжения, которое от каждой из трех групп подается на вход статического преобразователя. Статический преобразователь регулирует ток в цепи обмоток возбуждения, тем самым поддерживая тормозной ток в якорных цепях тяговых двигателей и, соответственно, тормозную силу электровоза.
Дальнейшее изменение тормозного тока тяговых двигателей, а следовательно, и тормозного усилия электровоза, происходит в три ступени величины тормозных резисторов путем переключения соответствующих реостатных контакторов.
Схема подключения задатчиков скорости и тормозной силы на ЭП2К к МПСУ приведена на рис. 2.2. В качестве основных резисторов-задатчиков R15, R16 применяются резисторы типа СП5-21А (см. рис. 2.2). Питание резисторов R15, R16 осуществляется от блока питания БП-141 МПСУ через контакты 22, 23 разъема X2 МПСУ.
Постоянное напряжение с резисторов R15, R16 подается через модули-усилители тока А2, А3; через контакты 8-11 разъема X2 на блок нагрузок БН-146 МПСУ.
От задатчика «Ток перехода» (на рис. 2.2 – S1) постоянное напряжение подается через модуль-усилитель А2; через контакт 7 разъема X2 на блок нагрузок БН-146 МПСУ.

Рис. 2.2. Схема подключения задатчиков скорости и тормозной силы к МПСУ-007 на ЭП2К
Переключателем SA1 служит для подключения КМ-35 к работе с МПСУ из одной или другой кабины машиниста.
Изменением напряжения на выходе резисторов R15, R16 с последующим усилением выходных сигналов по току позволяет осуществлять задание скорости и тормозной силы во всем диапазоне допустимых нагрузок.
В качестве задатчиков напряжения применяются резисторы типа СП5-21А (рис. 2.3).
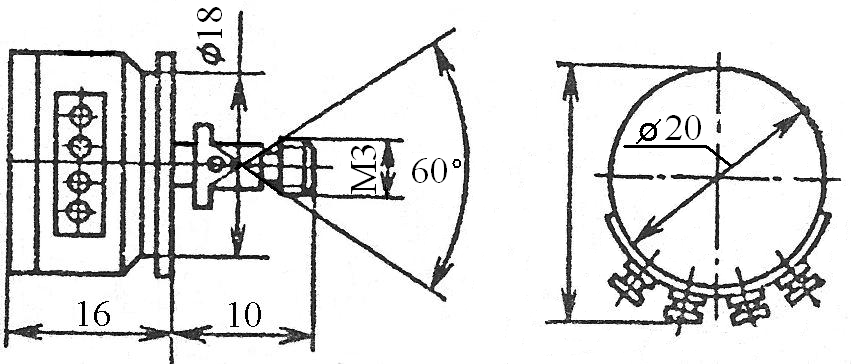
Рис.2.3. Габаритные размеры резистора СП5-21А
На конце подвижной части резистора выполнена резьба М3 (см. рис. 2.3), предназначенная для крепления рычага (см. рис. 1.10).