

1.2. Задатчики параметров микропроцессорных систем управления электровозов эп1, эп1п(м)
На пассажирских электровозах ЭП1, ЭП1П(М) переменного тока реализованы две системы регулирования заданных параметров работы: ручная и автоматизированная.
При ручной системе машинист, регулируя напряжение управления с помощью рукояток, задает в режиме тяги токи тяговых двигателей, а в режиме рекуперативного торможения – ток возбуждения тяговых двигателей и токи якорей. В режиме рекуперации используется независимое возбуждение тяговых двигателей.
При автоматизированной системе управления с помощью релейно-контактной схемы формируется двухконтурная замкнутая система регулирования по двум параметрам: току якоря и скорости, как в режиме тяги, так и в режиме рекуперативного торможения. Причем для управления используются те же рукоятки, что и при ручной системе, но с помощью напряжения управления предварительно задаются и в процессе работы без вмешательства машиниста автоматически поддерживаются ток и скорость. Рукоятки задатчиков напряжений располагаются на пульте машиниста и через контроллер позволяют управлять электровозом во всех режимах.
Контроллер машиниста представляет собой аппарат, состоящий из трех переключателей управления. Каркас аппарата составляют пять рам, скрепленных шестью плоскими рейками. На рис. 1.1 приведена упрощенная кинематическая схема контроллера машиниста КМ-87. В каркасе на подшипниках установлены четыре вала: главный 1 с дополнительным 2, реверсивно-режимный 3 и вал скорости 4. Вал скорости и реверсивно-режимный вал выполнены соосно. Валы в совокупности с кулачковыми контакторами (на рис. 1.1. – не показаны) составляют переключатели: главный и реверсивно-режимный.
На верхней крышке КМ-87 (рис. 1.2) расположены рукоятки реверсивно-режимного вала 3, вала скорости 2 и штурвал 1 главного вала (главный штурвал).
Главный штурвал 1 (рис. 1.2) установлен на дополнительном валу 2 (рис. 1.1) и приводит во вращение главный вал 1 (рис. 1.1) посредством цепной передачи 5 через звездочки 6 и 7.
Рукоятка скорости 2 (рис. 1.2) установлена непосредственно на конце вала, реверсивно-режимная рукоятка 3 – съемная, соединяется с реверсивно-режимным валом через фасонную щель во фланце.
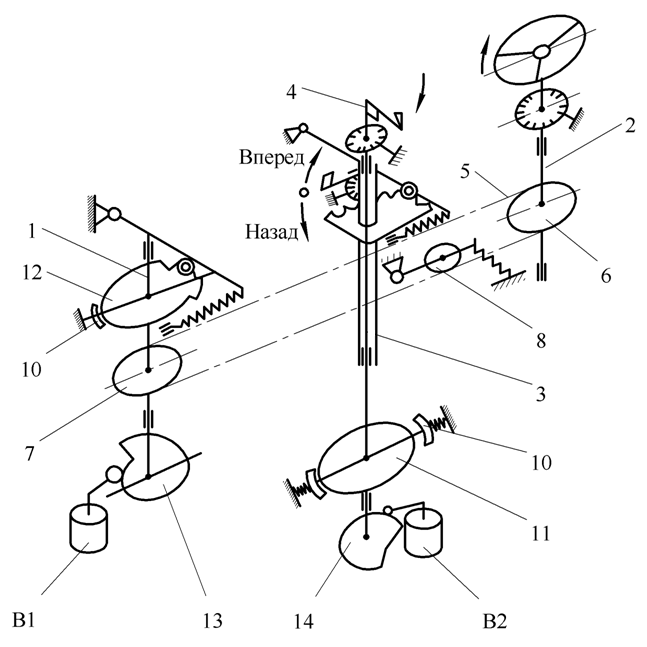
Рис. 1.1. Кинематическая схема контроллера машиниста
Реверсивно-режимный вал является опорой для подшипников вала скорости. С главным штурвалом 1 и рукояткой скорости 2 жестко связаны диски 4 и 5 (см. рис. 1.2), на которых расположены шкалы-указатели положений этих валов. В ночное время эти шкалы подсвечиваются узким пучком света. Лампы подсветки закрыты колпачками 6, имеющими узкие прорези для создания направленного пучка света. Указатель положений 7 реверсивно-режимного вала неподвижно закреплен на верхней крышке.
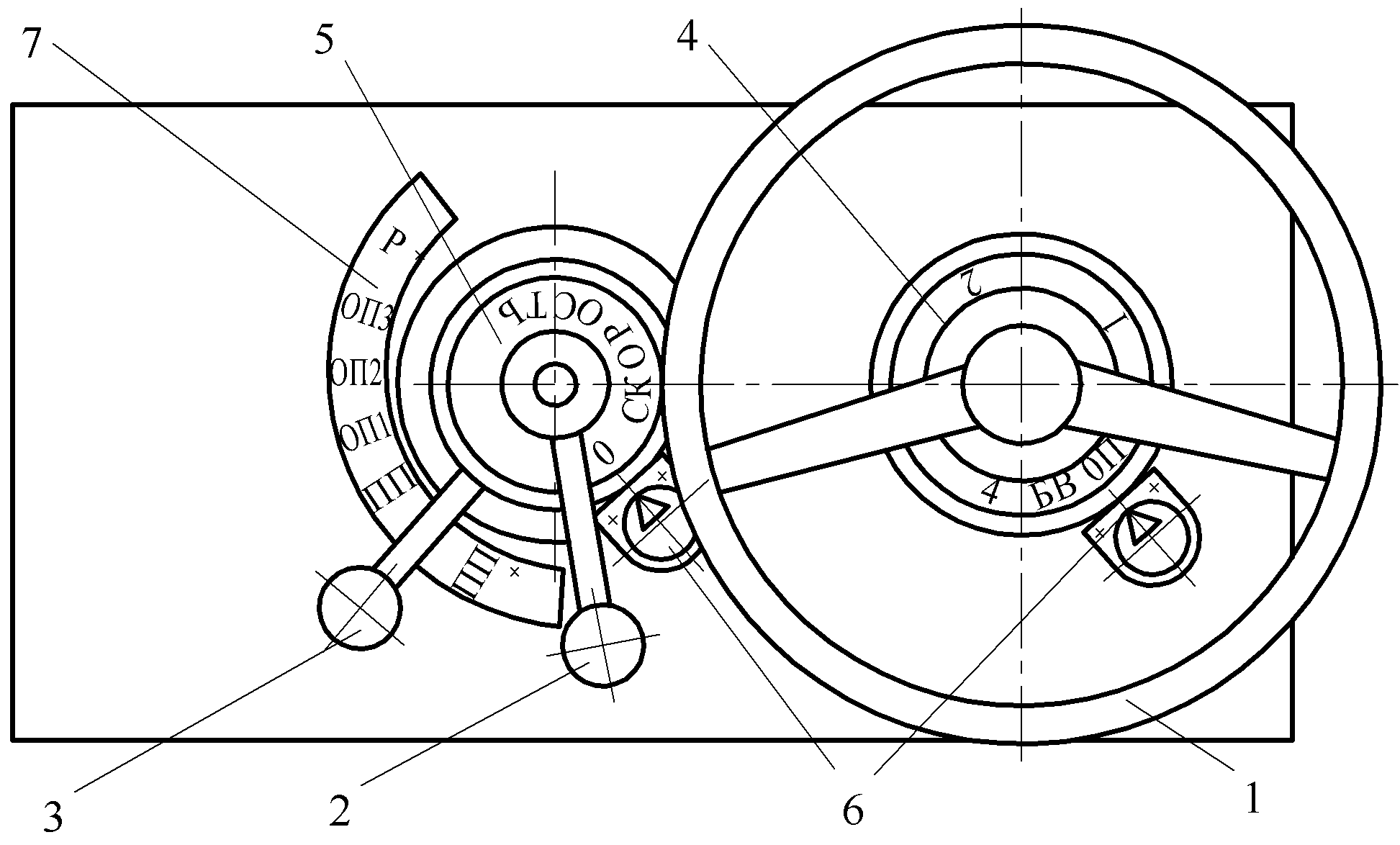
Рис. 1.2 – Контроллер машиниста КМ-87
Главный штурвал 1 служит для управления электровозом в режиме тяги и рекуперативного торможения, имеет следующие позиции (рис 1.2): 0 – нулевая; БВ – быстрое выключение; П – подготовка схемы (сбор схемы); НР – начало регулирования; 1 – конец первой зоны регулирования; 2 – конец второй зоны регулирования; 3 – конец третьей зоны регулирования; 4 – конец четвертой зоны регулирования. Позиции 0 и П – фиксированные, позиции БВ, НР, 1, 2, 3, 4 – нефиксированные, позиция БВ – с самовозвратом.
Реверсивно-режимный переключатель 3 служит для подачи команд на изменение направления движения и на изменение режима работы электровоза: тяга или рекуперативное торможение, а также для ослабления возбуждения тяговых электродвигателей. Реверсивно-режимный переключатель имеет следующие позиции: 0 – нулевая; ПП «Вперед» – полное возбуждение (вперед); ОП1 –первая ступень ослабления возбуждения; ОП2 – вторая ступень ослабления возбуждения; ОП3 – третья ступень ослабления возбуждения; Р – рекуперативное торможение; ПП«Назад» – полное возбуждение (назад). Все позиции реверсивно-режимного переключателя – фиксированные.
На валах главного и реверсивно-режимного переключателей установлены кулачковые шайбы (на рис. 1.1, 1.2 не показаны), воздействующие своими профилями на ролики кулачковых контакторов, размещенный на рейках каркаса.
Вал скорости 4 (рис 1.1) не имеет кулачковых шайб и кулачковых контакторов, на нем установлены два диска: один – для механического блокирования между валами, другой – для ограничения поворота вала. Позиции вала скорости: 0 – нулевая; «Скорость» – зона регулирования скорости.
От самопроизвольного перемещения главный вал 1 и вал скорости 4 (рис. 1.1) защищены дополнительным тормозом, в котором бронзовые стаканы 10, опираясь на диски 11, с помощью пружин создают усилие, достаточное для удержания валов в определенном положении при движении электровоза.
Сельсины являются задатчиками напряжения управления при ручной системе регулирования, а при автоматизированной системе управления – задатчиками усилия и скорости. Сельсины В1, В2 (рис 1.1) – это индукционные машины переменного тока, которые позволяют при постоянном уровне переменного напряжения на входе получать на выходе переменное напряжение, амплитуда и фаза напряжений определяются угловым положением ротора. Из всего многообразия номенклатуры сельсинов на электровозах ЭП1 применяются бесконтактные сельсины серии БД-1501. Габаритные и установочные размеры сельсины приведены на рис. 1.3.
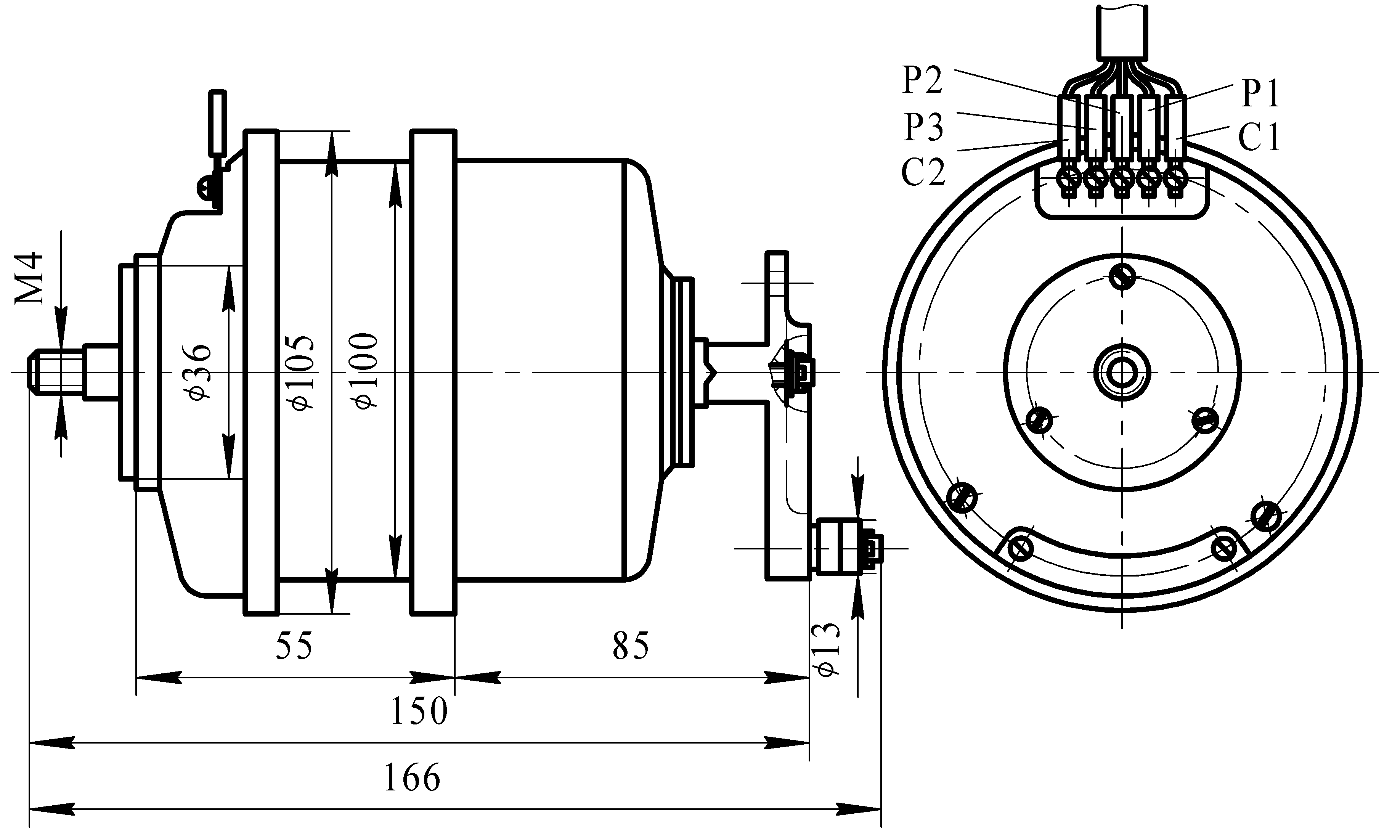
Рис. 1.3. Габаритные размеры сельсина БД-1501
Бесконтактный сельсин (рис. 1.4) состоит из корпуса 6, отлитого из алюминиевого сплава, совместно с задним подшипниковым щитом. Внутри корпус имеет цилиндрическую расточку, в которую запрессованы пластины внешнего магнитопровода 7 с распорными силуминовыми клиньями.
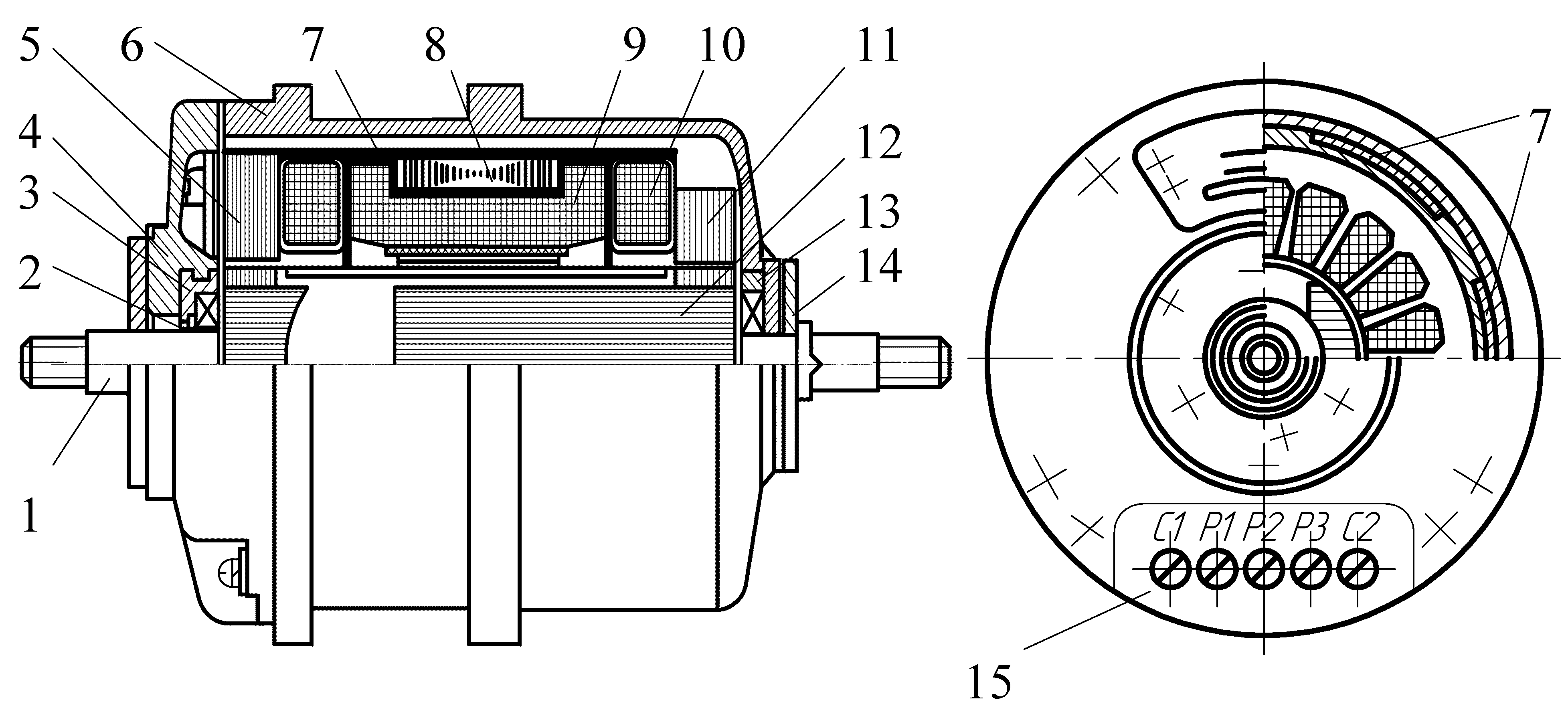
Рис. 1.4. Конструктивное исполнение бесконтактного сельсина
На передней части пластин и клиньев находится выточка с уступами для посадки переднего кольцевого сердечника 5, а на задней – для посадки заднего кольцевого сердечника 11. В центральной части корпуса 6 имеется выточка, в которую запрессован пакет статора 8 из пластин электротехнической стали, склеенных клеем БФ-2. В пазы пакета статора уложены равномерно распределенные обмотки синхронизации (вторичные обмотки) 9, а между лобовыми частями обмотки синхронизации и кольцевыми сердечниками магнитопровода – катушки возбуждения (первичные обмотки) 10, которые изолированы от лобовых частей обмотки и магнитопроводов 11 и 5 изоляционными прокладками.
В переднем подшипниковом щите 4 и дне корпуса размещены стальные втулки 3 и 13, обеспечивающие более надежную посадку подшипников. На переднем подшипниковом щите винтами закреплена изоляционная панель 15 с выводами, обозначенными С1 и С2 – для подключения начала и конца катушек возбуждения, а Р1, Р2, Р3 – для концов обмоток синхронизации. Ротор 12 состоит из магнитопроводов с отверстиями, набранных из пластин электротехнической стали и склеенных клеем БФ-2. Внутрь этих магнитопроводов вставлены или целые валы 1 из немагнитного материала, или два коротких валика из конструкционной стали. Магнитопроводы и валики механически соединяют между собой посредством заливки силумином.
Благодаря наличию отверстий в магнитопроводе ротора и немагнитному валику поток, создаваемый катушками возбуждения, имеет определенное направление. При повороте ротора меняется направление магнитного потока, а следовательно, и напряжения в обмотках синхронизации. Для фиксации деталей на конце вала имеется кольцо 2 с зубом. Подшипники с наружной стороны закрыты подшипниковыми крышками 4 и 14.
Технические данные сельсина БД-1501:
- номинальное напряжение обмотки возбуждения: 110 В;
- номинальная частота: 50 Гц;
- ток возбуждения: не более 1,3 А;
- потребляемая мощность: не более 28 Вт;
- максимальное вторичное напряжение: 55 В.
На главном валу (см. рис. 1.1) установлена профильная шайба 13, которая через поводок 1 с подшипником на конце (см. рис. 1.3, наружный диаметр подшипника – 13 мм) связана с сельсином В1 (рис. 1.1). Сельсин В1 является задатчиком угла открытия тиристоров выпрямительно-инверторных преобразователей (ВИП). Поводок постоянно притянут к шайбе 13 (рис. 1.1) специальной пружиной.
На валу скорости 4 (рис 1.1) установлена профильная шайба 14, которая аналогично шайбе 13 через поводок связана с сельсином В2 (рис. 1.1). Сельсин В2 является задатчиком угла открытия тиристоров выпрямительной установки возбуждения в режиме рекуперативного торможения. Поводок сельсина В2 постоянно притянут к шайбе 14 (рис. 1.1) специальной пружиной.
Схема подключения сельсинов – задатчиков от КМ-87 к микропроцессорной системе управления и диагностики МСУД приведена на рисунке 1.5.
Питание обмоток возбуждения сельсинов осуществляется от цепей собственных нужд. Напряжение 380 В по проводам С1, С2 через предохранитель F17 подводится к понижающим трансформаторам Т40, Т42 через стабилизаторы Т36 и Т41 основного и резервного каналов через контакторы КМ40. Переключение контактора происходит автоматически в случае нарушения работы одного из каналов передачи энергии, пониженное до рабочего напряжение 110 В

Рис. 1.5. Схема подключения сельсинов-задатчиков от КМ-87 к МСУД электровоза ЭП1
подводится через контакты блокировочного переключателя SA3 (SA4) и контакты 77-78 КМ-87 к выводам С1, С2 обмоток возбуждения сельсинов.Постоянное заданное напряжение с движка резистора R1 через контакты 69-70 КМ-87 по проводу А31 подводится к МСУД (на рис. 1.5 – А55) и далее через контакт входного разъема X13/7 и контакт X1/4 внутреннего модуля АЦ (на рис.1.5 – А19), входящего в состав МСУД. В модуле А19 подведенное напряжение подается на аналого-цифровой преобразователь (ячейка 2 модуля А19).Напряжение управления тиристорами ВИП с выводов сельсина В1 через клеммы Р1, Р3, выпрямитель V1-V4 подается на нагрузку – резистор R1.
Напряжение управления тиристорами ВУВ с выводов сельсина В2 через клеммы Р1, Р3, выпрямитель V5-V8 подается на нагрузку – резистор R2.
Постоянное заданное напряжение с движка резистора R2 через контакты 65-66 КМ-87 по проводу А49 подводится к МСУД (на рис. 1.5 – А55) и далее через контакт входного разъема X13/10 и контакт X1/9 внутреннего модуля АЦ (на рис.1.5 – А19), входящего в состав МСУД. В модуле А19 подведенное напряжение подается на аналого-цифровой преобразователь (ячейка 6 модуля А19).
Таким образом, заданное выпрямленное напряжение подводится к АЦП МСУД для дальнейшего преобразования его в цифровую форму.
|
|
а |
б |
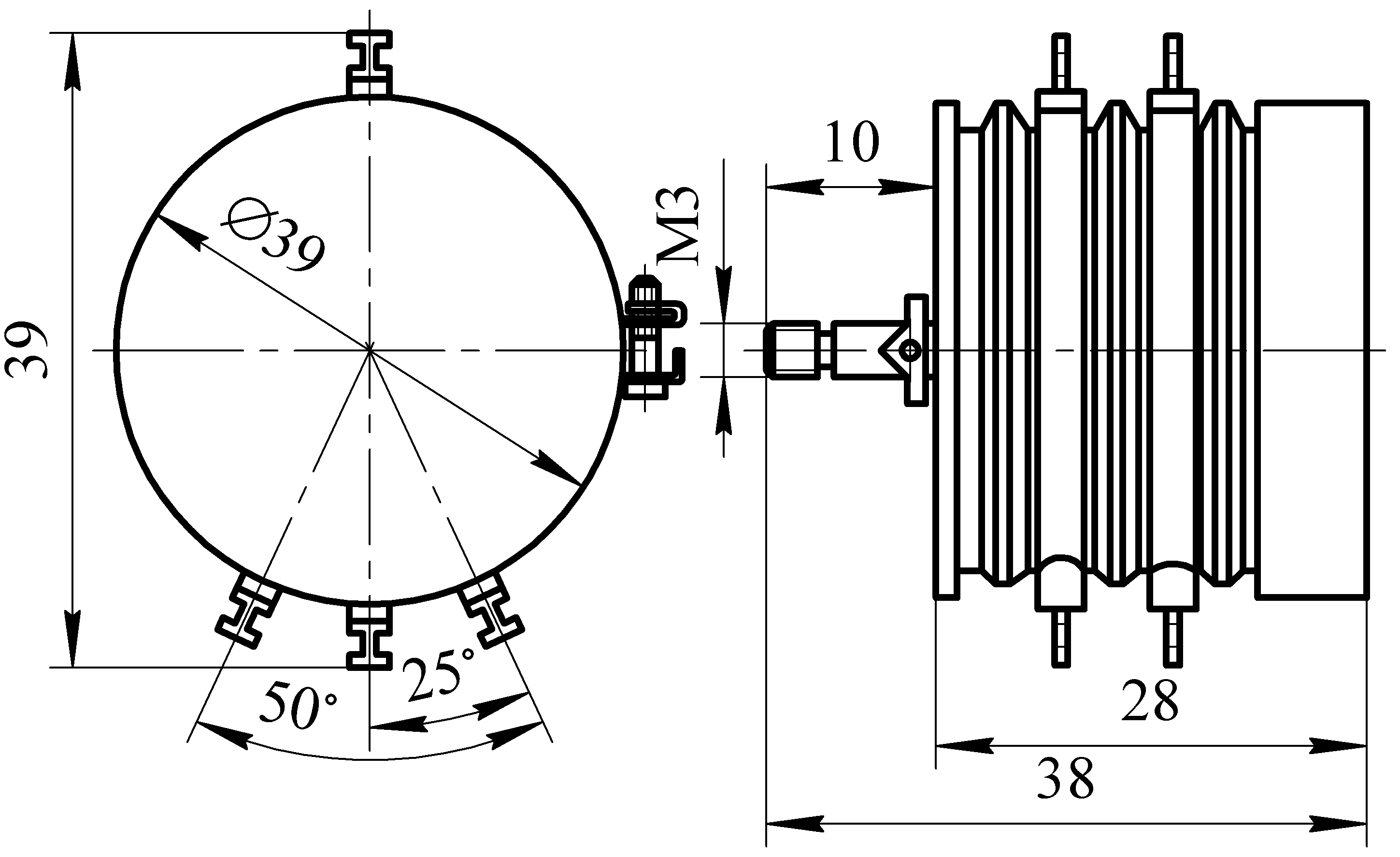
Рис. 1.6. Резистор СП4-8-2«а»: а – габаритные размеры, б – общий вид
На электровозах ЭП1П(М) применен контроллер машиниста типа КМ-27. Устройство КМ-27 аналогично КМ-87. Отличие состоит в уменьшенном количестве кулачковых шайб, контакторов и применении в нем в качестве задатчиков переменных резисторов типа СП4-8-2«а»-1 кОм (рис. 1.6 а, б) вместо сельсинов БД-1501.
При этом на панели диоды V1-V4, V5-V8 заменены на модуль усилителей тока А1. Валы переключателей главного вала и вала скорости соединены с осями резисторов через специальные поводки. Диаграмма выходных напряжений резисторов приведена на рис. 1.7, а схема подключения резисторов-задатчиков от КМ-27 к МСУД-Н – на рис. 1.8.
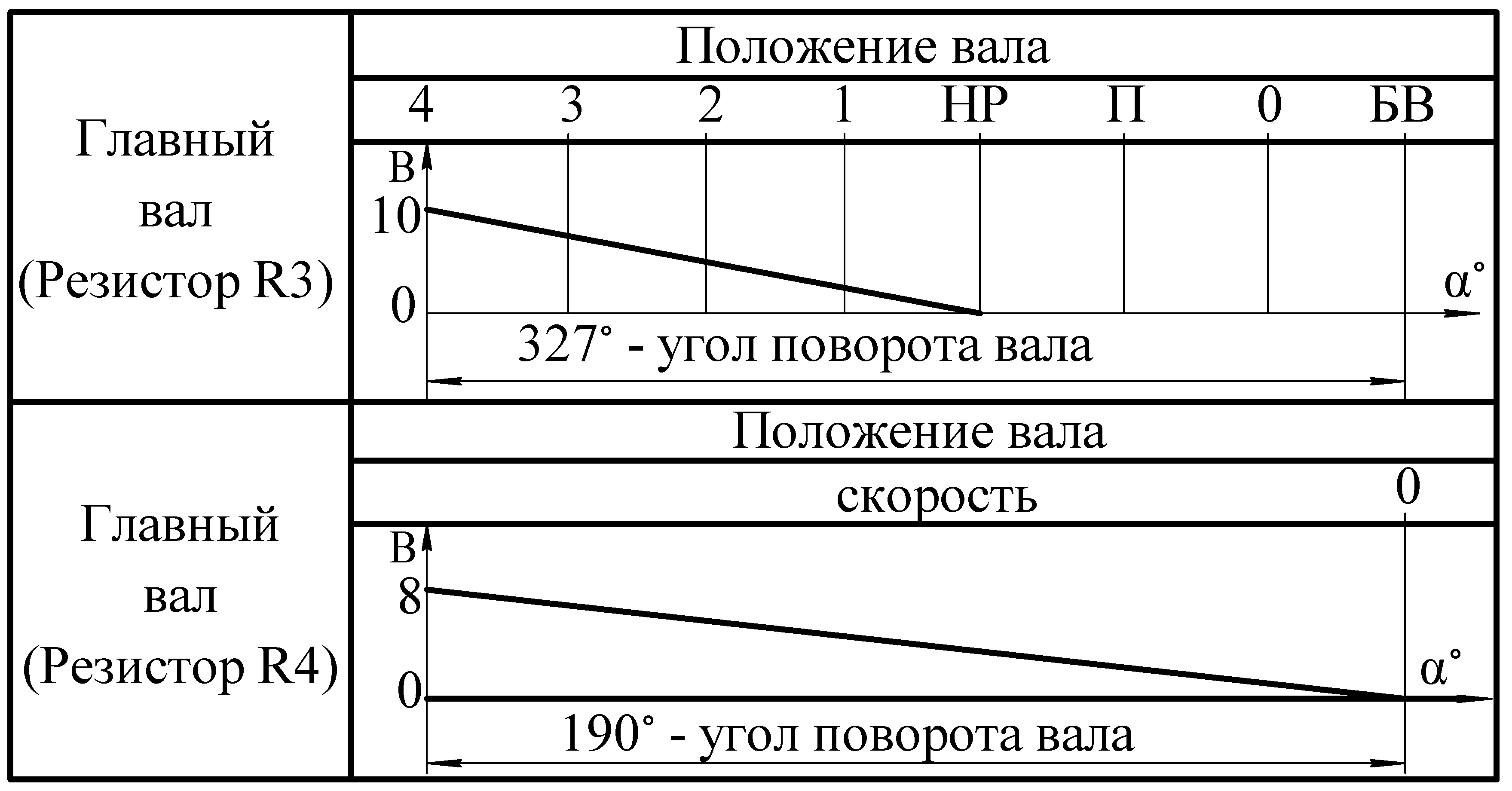
Рис. 1.7. Диаграмма выходных напряжений резисторов КМ-27
Питание резисторов R3, R4 КМ-27 осуществляется от блока питания БП-989 (рис. 1.8) МСУД-Н по проводам А164, А31.
Постоянное напряжение с движков резисторов R3, R4 через модуль токового усилителя А1 подается по проводам А33, А34 из КМ-27 на блок аналоговых сигналов БАС-051 (на рис. 1.8 – А19) МСУД-Н. АЦП БАС-051 преобразует аналоговые заданные напряжения в цифровую форму. Для регулирования величины выходного напряжения резисторов R3, R4 в КМ-27 установлены подстроечные резисторы R1, R2.

Рис. 1.8. Схема подключения резисторов-задатчиков тока якоря и скорости от КМ-27 к МСУД-Н электровоза ЭП1П(М)