

Министерство образования и науки, молодежи и спорта Украины
Керченский политехнический колледж НУПТ
Системы управления электроприводом
Методические рекомендации
по выполнению курсовой работы
для студентов очного и заочного отделения колледжа
по специальности: 5.05070104
«Монтаж и эксплуатация электрооборудования
промышленных предприятий и гражданских зданий»
Часть № 2
Разработал преподаватель
Некрасов В.А.
г. Керчь 2012
Оглавление
Краткое описание технологического процесса и основных узлов 3
крана. Условия и режим работы крана.
Технологические требования предъявляемые к
электроприводу при проектировании. 20
3. Системы управления крановым электроприводом. 23
4. Обоснование и выбор системы электрического привода. 25
5. Основное электрооборудование. 29
5.1. Магнитные контроллеры. 29
5.2. Силовые кулачковые контроллеры. 39
5.3.Ограничение предельных положений. 45
5.4. Защитные панели. 48
5.5. Приводы тормозных устройств. 51
5.5.1. Расчет тормозного устройства крана. 60
6. Расчет и выбор пускорегулирующих резисторов. 62
7. Мероприятия по технике безопасности при эксплуатации и
ремонте крана. 70
1.2 Краткое описание технологического процесса и основных узлов крана. Условие и режим работы крана.
Данный вопрос следует начинать с описания видов выпускаемой продукции, кратко указав последовательность операций работы механизма по изготовлению, выпуску, участию в технологии конкретного участка цеха, в котором устанавливается кран, а также особенности его работы в общем технологическом процессе.
Мостовой кран состоит из трех основных механизмов: механизм подъёма; механизм передвижения тележки и моста крана. В зависимости от режима эксплуатации, условий работы, технологии производства каждый механизм имеет конструкционную особенность.
Механизмы подъема
Основные типы механизмов подъема (лебедок) крюкових кранов даны на рис. 1.1, а - е. Основные части лебедки: двигатель 1, тормоз 6, редуктор 5, барабан 3 (4 — шарнирное соединение) с опорами 2. Двигатель соединен с редуктором упругой муфтой с тормозным шкивом (рис. 1.1, а - г), шкив ставят на вал редуктора. Соединение двигателя и редуктора валом-вставкой 7 с зубчатыми полумуфтами (рис. 1.1, д) улучшает равномерность нагрузки колес тележки крана мостового типа от ее веса. За счет применения фланцевого двигателя (рис. 1.1, е) и встроенной в специальный редуктор зубчатой муфты уменьшаются габаритные размеры лебедки.
В сопряжении барабана и редуктора наиболее часто используют шарнирное соединение (рис. 1.1, а, д), в котором поперечная сила передается через сферический подшипник, а вращающий момент — через зубчатое зацепление выходной вал редуктора и ось барабана образуют трехопорную балку с шарниром. Соединение двухопорного барабана и редуктора двухвенцовой зубчатой муфтой (рис. 1.1, б) может быть целесообразно, например, при малом диаметре барабана; валы редуктора и барабана образуют четырехопорную балку с двумя шарнирами. Тихоходные лебедки выполняют с трехступенчатым редуктором или с открытой зубчатой передачей (рис. 1.1 в, г); в последнем случае размещение шестерни на консоли выходного вала редуктора увеличивает нагрузку на подшипник редуктора и ухудшает условия работы зубьев; предпочтительнее схема на (рис. 1.1, г) с выносным подшипником 8 редуктора или схема на (рис. 1.1, в) с валом-вставкой 7. Малые габаритные размеры имеет лебедка с планетарной передачей, встроенной в барабан.
Число нарезок барабана зависит от типа полиспаста. Для портальних кранов большой грузоподъемности с шарнирно-сочлененной стрелой следует применять параллельные полиспасты (например, счетверенные) малой кратности. Нежелательны полиспасты кратности (m>2): для них при синтезе схемы стрелового устройства обычно получается неконструктивное значение параметра (с < 0). На лебедках кранов большой грузоподъемности или высоты подъема, а также металлургических кранов с большим весом поднимаемых частей применяют счетверенные полиспасты при барабанах с двумя двухзаходными нарезками встречного направлення, а иногда — укладку каната в два - три слоя (поверхности витков внутреннего слоя образуют канавки для наружного слоя. Схемы лебедок плавучих кранов грузоподъемностью 140 и
300 т даны на рис. 1.2. Механизм главного подъема плавучего крана грузоподъемностью 1400 т состоит из четырех лебедок, схемы которых представлены на рис. 1.3.


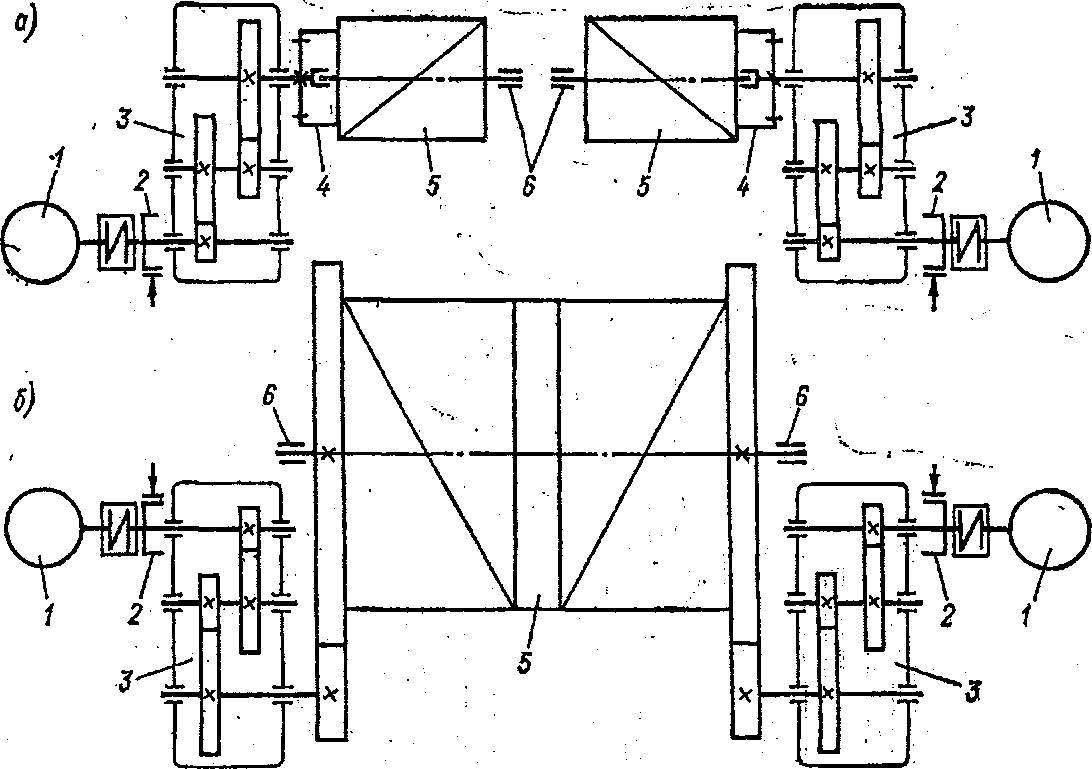
Рис. 1.2. Схемы лебедок плавучих кранов:
а- «Севастополец» (Q=140т); б-«Богатырь» (Q= 300 т)
1- двигатель; 2 - тормоз и упругая муфта; 3 - редуктор; 4 - шарнирное соединение; 5 - барабан; 6 - подшипники барабанов
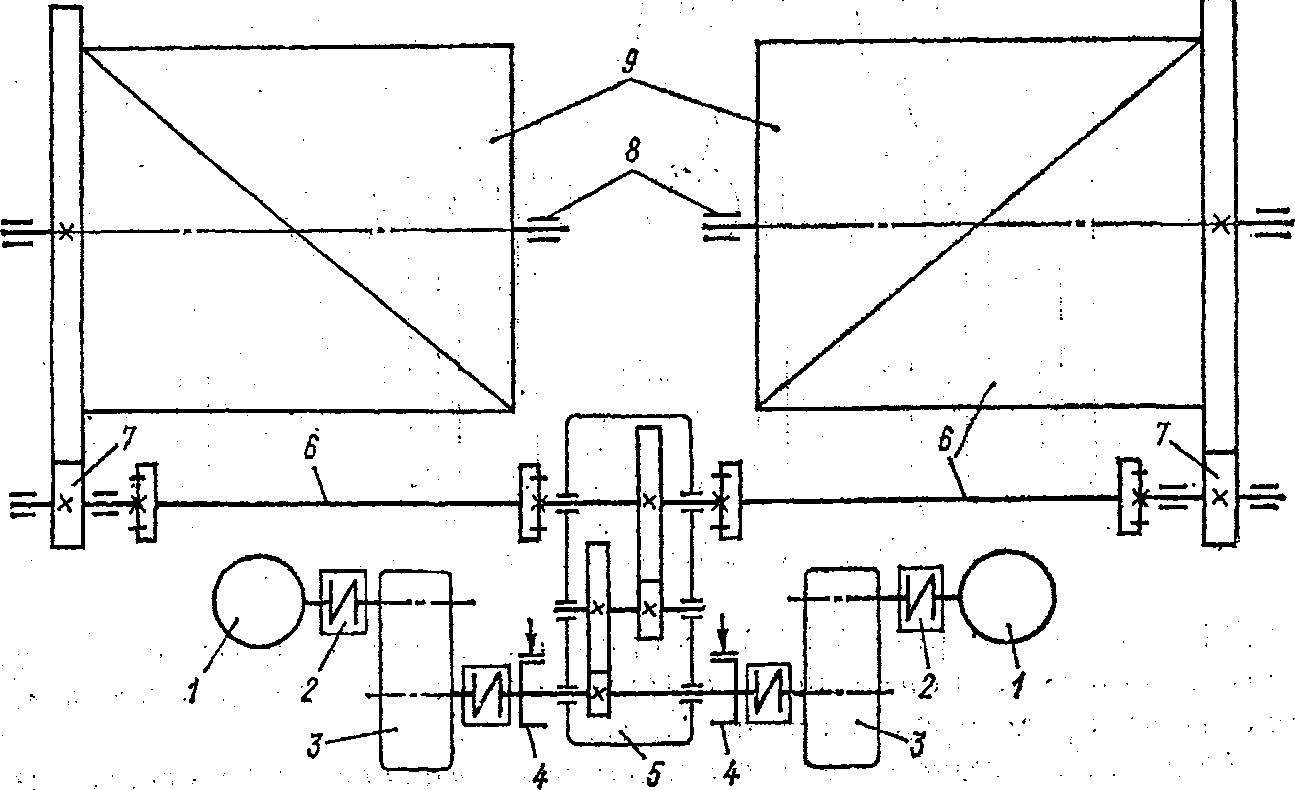
Рис. 1.3. Схема лебедки плавучего крана «Волгарь» грузоподъемностью