

1. Механика
1.1. Кинематика
1.1.1. Краткие теоретические сведения
П
 оложение
материальной точки в пространстве
задается
оложение
материальной точки в пространстве
задается
радиус-вектором
![]() ,
,
где
![]() – единичные векторы направлений (орты);
– единичные векторы направлений (орты);
x, y, z – координаты точки (рис. 1.1.1).
Абсолютное
значение
радиус-вектора
![]() .
.
Кинематические уравнения движения :
(в векторной форме)

или (в координатной форме)
 ,
где t
– время.
,
где t
– время.
Уравнение
траектории
![]() может быть получено из кинематических
уравнений координат исключением времени.
может быть получено из кинематических
уравнений координат исключением времени.
Скорость:
Средняя скорость
 ,
где
,
где
 –
перемещение материальной точки за
время t.
–
перемещение материальной точки за
время t.
Средняя скалярная (путевая) скорость:
 ,
где
,
где
 –
путь, пройденный точкой за время
–
путь, пройденный точкой за время
 .
.
Мгновенная скорость,

 ,
,
где
![]() – проекции скорости на оси координат.
– проекции скорости на оси координат.
Абсолютное
значение скорости
![]() .
.
Ускорение
Ускорение ,
где
![]()
![]() –
проекции ускорения на оси координат.
–
проекции ускорения на оси координат.
Абсолютное значение ускорения
 .
.П
 ри
криволинейном движении ускорение можно
представить как сумму нормальной
ри
криволинейном движении ускорение можно
представить как сумму нормальной
 и тангенциальной
и тангенциальной
 составляющей
составляющей
. Абсолютное
значение этих ускорений:
![]() ,
,
где R – радиус кривизны в данной точке траектории.
Путь
 где
где
 – модуль скорости;
– модуль скорости;
 и
и
 – начальный и конечный моменты времени,
соответствующие пройденному пути.
– начальный и конечный моменты времени,
соответствующие пройденному пути.
Перемещение
 ,
,
где
![]() – векторы, соответствующие начальному
и конечному положениям материальной
точки.
– векторы, соответствующие начальному
и конечному положениям материальной
точки.
Кинематические уравнения равнопеременного движения (
 )
)
![]() ,
,
где
![]() – начальная скорость.
– начальная скорость.
Положение твердого тела (при заданной оси вращения) определяется углом поворота (или угловым перемещением) . Кинематическое уравнение вращательного движения = f(t).
Средняя угловая скорость <> = /t,
где
– изменение угла поворота за интервал
времени t.
Мгновенная угловая скорость
![]() .
.
Угловое ускорение
 .
.Кинематические уравнения равнопеременного вращения ( = const)
 ,
где 0
– начальная
угловая скорость.
,
где 0
– начальная
угловая скорость.
Связь между линейными и угловыми величинами, характеризующими вращение материальной точки, выражается следующими формулами (рис. 1.1.3 и 1.1.4):
![]() .
.
|
|

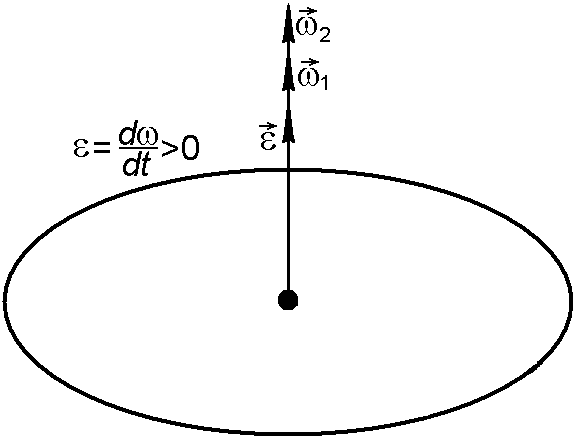
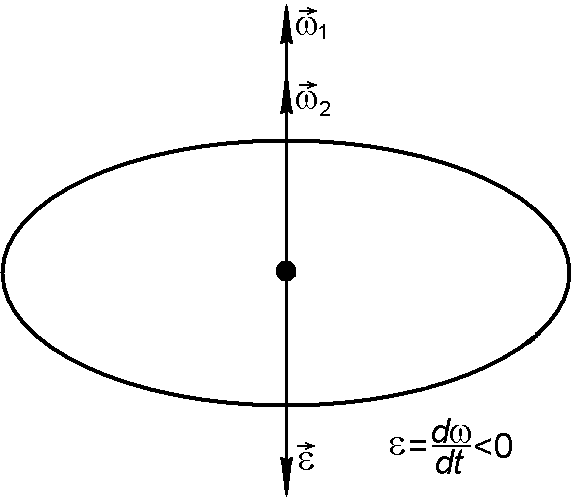
Рис. 1.1.3 Рис. 1.1.4
1.1.2. Методические указания
В кинематике следует различать прямую и обратную задачи. В прямой задаче необходимо получить закон движения, если известны скорость, либо ускорение. В этих случаях используют формулы п. 1.1.1, предварительно проанализировав условие задачи. При анализе необходимо установить начальные условия и записать их в форме дополнительных уравнений. Начальные условия служат для определения констант интегрирования скорости или ускорения.
Систему координат необходимо выбирать в зависимости от условий задачи, чтобы математическое решение было упрощено. Во многих случаях этому требованию удовлетворяет декартова система координат.
Следует обратить внимание на то, что законы движения в координатной форме содержат не путь, проходимый движущимся телом, а только его координаты.
В обратных задачах задается закон движения, из которого скорость и ускорение находятся простым дифференцированием.
Как правило, закон движения удобно записывать либо в координатной форме, либо в векторной как изменение радиус-вектора материальной точки или центра масс системы в зависимости от координат и времени.