

1. Построение плана скоростей на примере четырехзвенного шарнирного механизма.
2. Кулачковые механизмы. Типы плоских механизмов, параметры кулачка.
1)

2) Кулачковым называется трехзвенный механизм с высшей кинематической парой, входное звено которого называется кулачком, а выходное толкателем (или коромыслом).
Кулачок – звено, элемент высшей пары, имеющий профиль переменной кривизны. Толкатель может совершать поступательное или вращательное движение, во втором случае его называют коромысло. Кулачковые механизмы бывают плоские и пространственные, с толкателем, имеющим рабочим элементом острие, ролик или плоскость, центральные и дезаксиальные
Широкое распространение в технике получили кулачковые механизмы. Кулачковые механизмы предназначены для преобразования вращательного движения ведущего звена (кулачка) в заведомо заданный закон возвратно-поступательного движения ведомого звена (толкателя). Широко применяются кулачковые механизмы в швейных машинах, двигателях внутреннего сгорания, автоматах и позволяют получить заведомо заданный закон движения толкателя, а также обеспечить временные остановы ведомого звена при непрерывном движении ведущего.
1.Кулачковый механизм с поступательно движущимся толкателем (ползуном) - Кулачок, вращаясь с заданной угловой скоростью, действует на ролик и заставляет толкатель в виде ползуна двигаться в направляющих возвратно-поступательно.
2. Кулачковый механизм с поворачивающимся толкателем (коромыслом) - Кулачок, вращаясь с заданной угловой скоростью , действует на толкатель и заставляет последний вращаться вокруг оси вращения.
Параметром кулачкового механизма является угловая скорость.
Билет 10.
1. Построение плана скоростей на примере кривошипно-ползунного механизма.
2. Профиль кулачка и его влияние на режимы работы.
1) см. билет 9 первый вопрос.

2)
Как было отмечено выше при построении профиля кулачка применяется метод обращения движения. Вычерчивают окружность минимального радиуса и нулевое положение толкателя (толкатель опирается на окружность минимального радиуса). Придается всем звеньям угловая скорость (- ωкул).
Кулачок становится неподвижным, а толкатель со стойкой получают обращенное движение. Строят "n" положений толкателя в его обращенном движении и на каждом из них откладывают перемещения толкателя вдоль его оси в соответствии с заданным законом движения. Соединив отмеченные точки плавной кривой, получают теоретический профиль кулачка (рисунок 50).
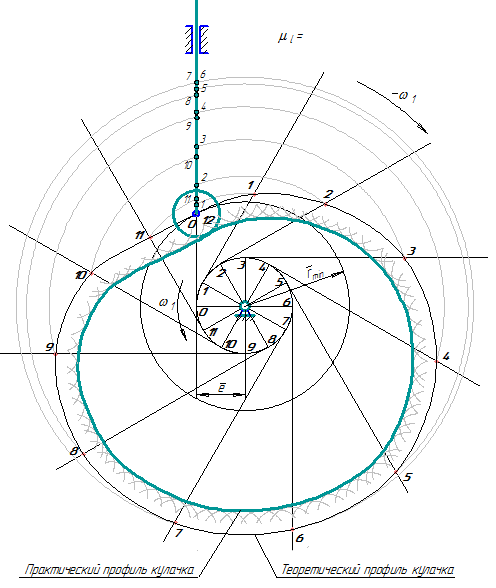
Рисунок 50
Приняв некоторое значение радиуса ролика (rрол), проводят ряд окружностей (засечек) этим радиусом с центром на теоретическом профиле. Внутри теоретического профиля проводят огибающую к этим окружностям (засечкам).
Полученная кривая представляет собой практический профиль кулачка. Радиус ролика выбирается из конструктивных соображений. Он может быть любым, но не больше минимального радиуса кривизны теоретического профиля (иначе произойдет самопересечение практического профиля и его заострение). Часто в качестве ролика принимают один из стандартных подшипников качения подходящих размеров.
Особенностью построения профиля кулачка с плоским толкателем является то, что положение толкателя определяется положением его тарелки. После того, как будут отмечены точки, показывающие положение толкателя в обращенном движении, необходимо через эти точки провести тарелку под углом 900 (или в общем случае под углом γ) к соответствующему положению оси толкателя. Огибающая к этим положениям тарелки в обращенном движении представляет собой профиль кулачка (рисунок 51).

Рисунок 51
В данном случае теоретический и практический профили совпадают. Если выбрано небольшое количество положений для построения, то тарелка в обращенном движении образует некоторый многоугольник, в который и надо вписывать профиль. При этом кривая, формирующая профиль, должна касаться всех положений тарелки в обращенном движении
Билет 11.