

1. Структурные группы, разновидности. Класс и порядок структурной группы.
2. Дифференциальные механизмы. Кинематика дифференциала.
1) все структурные группы принято разделять на классы – со 2-го по 4-й.
Примеры структурных групп и начального механизма приведены на рис. 2.8.
- Двухповодковая структурная группа 2-го кл.

- Структурная группа 2-го кл.

- Структурная группа 3-го кл.

- Структурная группа 4-го кл.
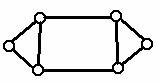
- Механизм 1-го кл. (начальный механизм)

Рис. 2.8. Примеры структурных групп
Наиболее распространённые структурные группы 2-го класса подразделяются на 5 видов (модификаций) (см.табл.).
Кинематическая схема структурной группы, вид |
Механизм, содержащий такую структурную группу |
|
|
|
|
|
|
|
|
|
|
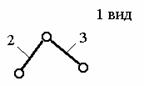



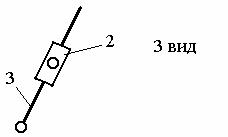

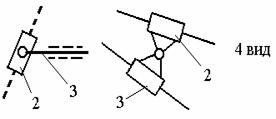


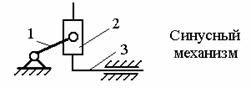
Примечание. 1 – ведущее звено; 2 и 3 – звенья, образующие структурную группу.
Для определения класса механизма его расчленяют на структурные группы, начиная с конца механизма. За начало механизма принимают ведущее звено (начальный механизм).
От конца механизма отделяются поочерёдно простейшие структурные группы до тех пор, пока не останется лишь механизм 1-го класса (начальный механизм, их может быть несколько).
По классу структурных групп определяют класс механизма. Количество начальных механизмов равно величине W.
2)В практике применяются зубчатые механизмы, имеющие колеса с подвижными геометрическими осями (сателлиты). Такие механизмы называются планетарными (если имеют одну степень свободы) или дифференциальными (если степень свободы равна двум).
Дифференциальный механизм — механизм, имеющий подвижную в пространстве или бегающую ось вращения зубчатых колёс, и все зубчатые колёса подвижны.
При кинематическом исследовании дифференциальных и планетарных механизмов применяется метод обращения движения (по-другому его называют методом остановки водила). Смысл этого метода заключается в том, что если всем звеньям системы добавить (с любым знаком) одну и ту же скорость, то характер относительного движения этих звеньев не изменится.
Билет 5.
1. Модификация диад и их применение в механизмах.
2. Виды зубчатых передач.
1) Диада содержит два звена и три кинематические пары. Известно пять модификаций диады.

Но существуют структурные группы, которые не делятся на более мелкие. В этом случае определяется класс и порядок структурной группы и ее называют в соответствии с этими данными. Класс структурной группы определяется числом кинематических пар, входящих в наиболее сложный замкнутый контур, порядок- числом внешних кинематических пар.

2) зубчатая передача - трехзвенные механизм, состоящий из двух зубчатых колес и стойки, в котором зубчатые колеса образуют между собой высшую пару, со стойкой - низшие ( поступательные или вращательные ).
Зубчатые передачи осуществляют передачу вращательного движения с одного вала на другой с помощью цилиндрических, конических, червячных колёс, имеющих специально профилированные зубья, при этом зубчатые колёса могут иметь прямые, косые, спиральные, шевронные зубья и др.
Цилиндрический зубчатый механизм с внешним зацеплением.
Цилиндрический зубчатый механизм с внутренним зацеплением.
Зубчатый механизм с реечным зацеплением зубьев.
Коническая зубчатая передача - При пересекающихся валах применяют конические колеса с прямыми зубьями, а также с косыми, криволинейными и круглыми.
Гиперболоидная зубчатая передача.
Червячная передача.
«Все эти виды принадлежат к механизмам трехзвенных зубчатых передач с неподвижными осями».
Билет 6.