

1. Основні показники регулювання швидкості обертання аеп.
Регулюванням швидкості називається примусова зміна швидкості електропривода залежно від вимог технологічного процесу. Поняття регулювання швидкості не слід змішувати із природною зміною швидкості, що виникає в електроприводах у силу зміни навантаження на валу працюючої машини. Регулювання швидкості здійснюється додатковим впливом на приводний двигун; воно може бути зроблено людиною або спеціальним автоматичним пристроєм. У цей час все більше застосування знаходить електричне регулювання швидкості, що має ряд переваг у відношенні технічних й економічних показників.
Основними показниками, що характеризують різні способи регулювання швидкості електроприводів, є: 1) діапазон регулювання; 2) плавність; 3) економічність; 4) стабільність швидкості; 5) напрямок регулювання швидкості (зменшення або збільшення її щодо основної швидкості); 6) припустиме навантаження при різних швидкостях.
1.
Діапазон
регулювання
кутової швидкості визначається
відношенням можливих сталих швидкостей:
максимальної
![]() до
мінімальній
до
мінімальній
![]()
![]() ,
,
при заданій точності регулювання (із заданим статичним падінням швидкості електропривода) для встановлених меж зміни моменту навантаження.
Звичайно діапазон регулювання виражається в числах у вигляді відносини, наприклад: 2:1, 4:1, 10:1, 20:1 і ін. Сучасні системи автоматичного регулювання електроприводів зі зворотними зв'язками дозволяють істотно розширити діапазон регулювання швидкості.
Різні виробничі машини вимагають різних діапазонів регулювання.
2. Плавність регулювання характеризує стрибок швидкості при переході від даної швидкості до найближчій можливої. Плавність тим вище, чим менше цей стрибок. Число швидкостей, одержуваних у даному діапазоні, визначається плавністю регулювання. Її можна оцінити коефіцієнтом плавності регулювання, що перебуває як відношення двох сусідніх значень кутових швидкостей при регулюванні
![]() ,
,
де
![]() й
й
![]() — кутові швидкості
відповідно на i
-й й (i— 1)-й
щаблях регулювання.
— кутові швидкості
відповідно на i
-й й (i— 1)-й
щаблях регулювання.
При
плавному регулюванні
![]() ,
а число швидкостей
,
а число швидкостей
![]() . У випадку східчастого
регулювання коефіцієнт плавності
регулювання може істотно відрізнятися
від одиниці.
Число швидкостей, діапазон регулювання
D і коефіцієнт плавності регулювання
при такому регулюванні зв'язані між
собою рівністю
. У випадку східчастого
регулювання коефіцієнт плавності
регулювання може істотно відрізнятися
від одиниці.
Число швидкостей, діапазон регулювання
D і коефіцієнт плавності регулювання
при такому регулюванні зв'язані між
собою рівністю
![]()
Плавність
регулювання в багатьох випадках визначає
якість.
У практиці електропривода найменшою
плавністю регулювання володіють двох
швидкісний АД
з короткозамкненим ротором
![]() = 2). Висока плавність
регулювання кутової швидкості досягається,
наприклад, у двигуні постійного струму
незалежного збудження при регулюванні
зміною потоку або напруги на якорі
двигуна.
= 2). Висока плавність
регулювання кутової швидкості досягається,
наприклад, у двигуні постійного струму
незалежного збудження при регулюванні
зміною потоку або напруги на якорі
двигуна.
3. Економічність регулювання характеризується витратами на спорудження й експлуатацію електропривода. Необхідно відзначити, що економічно вигідним виявляється такий регульований електропривод, що забезпечує більшу продуктивність приводить їм у дію механізм при високій якості технологічного процесу й порівняно швидко окупається.
При оцінці економічності регульованого електропривода варто брати до уваги надійність його в експлуатації, а також ураховувати дефіцитність матеріалів й устаткування, затрачуваних на спорудження того або іншого приводу. Істотне значення мають втрати енергії в процесі регулювання. Втрати потужності ΔР, що виникають при регулюванні швидкості, визначають ККД приводу:
![]()
де Р2 — потужність на валу двигуна.
При роботі двигуна на різних кутових швидкостях варто підраховувати так званий середньозважений ККД за регулювальний цикл, що складається зі щаблів, по вираженню
![]() ,
,
де
![]() й
й
![]() —
корисна потужність і втрати на
—
корисна потужність і втрати на
![]() -і
щабля;
-і
щабля;
![]() — час, протягом якого
двигун працює на
— час, протягом якого
двигун працює на
![]() -й
щабля.
-й
щабля.
З цього співвідношення треба, що при відомих умовах роботи електропривода ККД за цикл може виявитися значно вище ККД на якій-небудь одному щаблі швидкості. Якщо цикл не заданий, то можна прийняти, що на всіх щаблях двигун працює однаковий час із однаковим навантаженням.
Втрати енергії при регулюванні швидкості різні для різних способів регулювання. Вони порівняно великі в системах, де регулювання ведеться в головних ланцюгах машин, і значно нижче при регулюванні в ланцюгах збудження. Останнє стає зрозумілим, якщо згадати, що потужність ланцюга збудження, наприклад, машин постійного струму становить лише 1-5 % потужності головних ланцюгів.
Важливим економічним показником електропривода є коефіцієнт потужності й споживання реактивної енергії за робочий цикл. У випадку двигуна змінного струму зрушення фаз між струмом і напругою мережі обумовлюється споживанням реактивної потужності, затрачуваної на створення магнітного потоку.
Знаючи
споживані двигуном активну![]() й
реактивну
й
реактивну![]() потужності,
можна визначити коефіцієнт потужності,
з яким у цей момент працює двигун:
потужності,
можна визначити коефіцієнт потужності,
з яким у цей момент працює двигун:
![]() ,
,
і середньозважений коефіцієнт потужності при роботі на різних кутових швидкостях з різним часом:
![]()
Номінальний
коефіцієнт потужності для більшості
двигунів становить
0,8 - 0,9 і залежить від потужності
двигуна. З ростом потужності й номінальний
кутової
швидкості двигуна підвищується
номінальний коефіцієнт
потужності. Коефіцієнт потужності
асинхронного двигуна
залежить від навантаження; при холостому
ході коефіцієнт потужності малий
внаслідок значної
реактивної потужності, затрачуваної
на створення потоку, і малої активної
потужності, зв'язаної лише з постійними
втратами. У міру росту навантаження
приблизно до номінальної
активна потужність росте швидше
реактивної й
![]() '
зростає до номінального значення.
'
зростає до номінального значення.
Широке використання керованих напівпровідникових перетворювачів для регулювання кутової швидкості двигунів постійного й змінного струму приводить до зміни форми первинної напруги й струму й до значного зростання споживаної з мережі реактивної потужності. Коефіцієнт потужності приблизно дорівнює:
![]()
де
![]() —
мінімальна кутова швидкість ідеального
холостого
ходу, що відповідає найбільшому куту
регулювання
—
мінімальна кутова швидкість ідеального
холостого
ходу, що відповідає найбільшому куту
регулювання
![]() —
те ж при
—
те ж при
![]()
4. Стабільність кутової швидкості характеризується зміною кутової швидкості при заданому відхиленні моменту навантаження й залежить від механічної характеристики; вона тим вище, чим більше жорсткість характеристики.
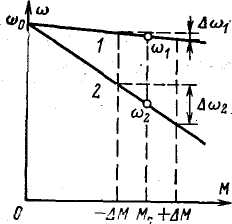
Рис. 4.1. Зміна кутової швидкості для механічних характеристик різної жорсткості.
Якщо при регулюванні кутової швидкості жорсткість характеристики змінюється, то й відхилення швидкості від заданої теж буде змінюватися. На рис. 4.1 наведені дві характеристики двигуна постійного струму паралельного збудження при регулюванні кутової швидкості введенням резисторів у ланцюг якоря.
Якщо
при цьому момент опору
![]() залишається
незмінним, то двигун,
що працював раніше з кутовою швидкістю
залишається
незмінним, то двигун,
що працював раніше з кутовою швидкістю
![]() ,
буде
після введення додаткового резистора
в ланцюг якоря працювати
з кутовою швидкістю
,
буде
після введення додаткового резистора
в ланцюг якоря працювати
з кутовою швидкістю
![]() .
Однак при наявності
змін навантажувального моменту в деяких
межах
.
Однак при наявності
змін навантажувального моменту в деяких
межах
![]() кутова
швидкість двигуна не залишається
постійної, вона змінюється щодо середніх
значень
або
кутова
швидкість двигуна не залишається
постійної, вона змінюється щодо середніх
значень
або
![]() .
Відхилення кутової швидкості
.
Відхилення кутової швидкості
![]() ,
викликані
змінами навантаження, будуть тим більше,
чим менше жорсткість
характеристики. Це обставина в багатьох
випадках обмежує діапазон регулювання
швидкості.
,
викликані
змінами навантаження, будуть тим більше,
чим менше жорсткість
характеристики. Це обставина в багатьох
випадках обмежує діапазон регулювання
швидкості.
5. Напрямок регулювання швидкості, тобто зменшення або збільшення її стосовно основної швидкості, залежить від способів регулювання.
Основна
кутова швидкість, наприклад, двигуна
постійного
струму незалежного збудження відповідає
номінальним
значенням напруги й магнітного потоку.
Ця
швидкість виходить у тому випадку, коли
в ланцюгах двигуна
немає ніяких зовнішніх резисторів,
тобто точка |![]() перебуває
на природній механічній характеристиці.
перебуває
на природній механічній характеристиці.
Розрізняють однозонне регулювання вниз від основної швидкості, однозонне регулювання нагору від основної швидкості й двох зонне регулювання, коли є можливість одержувати характеристики вище й нижче природної.
При регулюванні за допомогою резисторів у ланцюзі якоря двигуна постійного струму або в ланцюзі ротора асинхронного двигуна кутова швидкість у руховому режимі при даному навантаженні в міру збільшення опору резисторів зменшується. Це означає, що регулювання зміною опору резисторів може бути здійснено тільки вниз стосовно основної швидкості.
Навпроти, регулювання зменшенням магнітного потоку веде в межах нормальних навантажень до збільшення кутової швидкості, тобто в цьому випадку здійснюється однозонне регулювання нагору від основної швидкості.