

2. Механічні й електромеханічні характеристики двигуна постійного струму.
Електромеханічна і механічна характеристики двигуна постійного струму.
Звичайна схема включення двигуна постійного струму незалежного збудження представлена на рис. 3.3. Якір двигуна М и його обмотка збудження ОВ звичайно одержують живлення від різних, незалежних друг від друга джерел напруги U
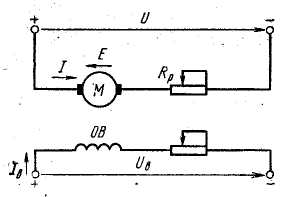
Рис. 3.3. Схема включення двигуна постійного струму
незалежного збудження.
і UB, що дозволяє окремо регулювати напругу на якорі двигуна й на обмотці збудження й виконувати їх на різну номінальну напругу. Лише при наявності тільки одній мережі постійного струму, обмотка збудження живіться від того ж джерела напруги, що і якір двигуна (двигун паралельного збудження). Але й у цьому випадку струм збудження ІВ не залежить від струму І якоря двигуна.
Напрямок
струму І й ЕРС обертання двигуна Е,
показані на рис. 3.3, відповідають руховому
режиму
роботи, коли електрична енергія
споживається двигуном
з мережі (від джерела напруги U)
і перетворюється в
механічну енергію, потужність якої
дорівнює
![]() Залежність же між
Залежність же між
![]() двигуна визначається
його механічною характеристикою.
двигуна визначається
його механічною характеристикою.
Аналітичне вираження механічної характеристики двигуна може бути отримане з рівняння рівноваги напруг, складеного для якірного ланцюга схеми (рис. 3.3). При сталому режимі роботи двигуна прикладена напруга U, В, урівноважується спаданням напруги в якірному ланцюзі IR і наведеної в якорі ЭРС обертання Е, В, тобто
![]()
тут І — струм в якірному ланцюзі двигуна, A; R — сумарний опір якірного ланцюга, Ом, що включає зовнішній опір резистора RР і внутрішній опір якоря двигуна Rя (при наявності додаткових полюсів ураховується і їхній опір);
![]()
де k
— коефіцієнт, що залежить
від конструктивних даних
двигуна,
![]() (р —
число пар полюсів двигуна; N
— число активних провідників
обмотки якоря; а —
число пар паралельних галузей обмотки
якоря);
(р —
число пар полюсів двигуна; N
— число активних провідників
обмотки якоря; а —
число пар паралельних галузей обмотки
якоря);
![]() — відповідно магнітний
потік, Вб, і кутова швидкість
двигуна, рад/с.
— відповідно магнітний
потік, Вб, і кутова швидкість
двигуна, рад/с.
Якщо в (3.1) замість Е підставимо її значення Е з (3.2), то одержимо рівняння для швидкості двигуна
![]()
Рівняння
(3.3) являє собою залежність швидкості
двигуна від струму якоря. Таку залежність
![]()
![]() називають
електромеханічною
характеристикою двигуна.
називають
електромеханічною
характеристикою двигуна.
Для одержання рівняння механічної характеристики необхідно знайти залежність швидкості від моменту двигуна. Це легко зробити, якщо врахувати, що момент, Нм, що розвиває двигун, пов'язаний з струмом якоря й магнітним потоком простою залежністю, а саме:
![]()
Підставивши в (3.3) значення струму, знайдене з (3.4), одержимо вираження для механічної характеристики:

Механічна характеристика двигуна, при незмінних параметрах U, Ф и R представляється прямою лінією. Нижче показано, що змінюючи той або інший параметр механічної характеристики, можна при певному моменті опору на валу двигуна одержувати різні швидкості двигуна, тобто регулювати швидкість електропривода.
Якщо
в якірний ланцюг двигуна включений
додатковий
резистор (реостат), то механічні
характеристики, одержувані
при цьому, називаються штучними
або
реостатними.
Ці характеристики перетинаються все
в одній крапці
![]() Реостатні
характеристики так само лінійні,
як і природна характеристика, але мають
значно більший нахил до осі моментів,
т, е. мають меншу жорсткість, що має
вигляд:
Реостатні
характеристики так само лінійні,
як і природна характеристика, але мають
значно більший нахил до осі моментів,
т, е. мають меншу жорсткість, що має
вигляд:
![]()
Чим більше уведене в ланцюг якоря опір резистора, тим крутіше йде характеристика, тим менше її жорсткість.