

Файл Моп_Л8_2сПМ.doc из "Прямые методы условной оптимизации-Лекц1.doc" из А.Г.Трифонов. "Постановка задачи оптимизации и численные методы ее решения" 3. Методы условной оптимизации. I:\RES_H\WORK\EDUCATION\ХНУРЭ - учебные курсы\МЕТОДЫ ОПТИМИЗАЦИИ\MO\MO\NewLab20807\Doc\MProection\Метод проекций гр.doc , "методы возм_направ Л1.doc"
Прямые методы условной оптимизации Лекция 1
В общем случае численные методы решения задач нелинейного программирования можно разделить на прямые и непрямые. Прямые методы оперируют непосредственно с исходными задачами оптимизации и генерируют последовательности точек {x[k]}, таких, что f(х[k+1]) < f(x[k]). Здесь в [] – индекс. В силу этого такие методы часто называют методами спуска.
Математически
переход на некотором k-м
шаге (k.
![]() 0,
1, 2, ...) от точки х[k]
к точке
x[k+1]
можно записать в следующем виде:
0,
1, 2, ...) от точки х[k]
к точке
x[k+1]
можно записать в следующем виде:
x[k+l]
![]() x[k]
+ akp[k],
x[k]
+ akp[k],
где р[k] — вектор, определяющий направление спуска;
аk — длина шага вдоль данного направления.
При этом в одних алгоритмах прямых методов точки х[k] выбираются так, чтобы для них выполнялись все ограничения задачи, в других эти ограничения могут нарушаться на некоторых или всех итерациях. Таким образом, в прямых методах при выборе направления спуска ограничения, определяющие допустимую область G, учитываются в явном виде.
Непрямые методы сводят исходную задачу нелинейного программирования к последовательности задач безусловной оптимизации некоторых вспомогательных функций. При этих методах ограничения исходной задачи учитываются в неявном виде. К ним относятся методы функции Лагранжа и штрафных функций, рассмотренные на прошлых лекциях. Рассмотрим теперь некоторые алгоритмы прямых методов.
Метод проекции градиента
Проведем сначала «правдоподобные рассуждения» и рассмотрим алгоритм данного метода применительно к задаче оптимизации с ограничениями-неравенствами. В качестве начальной выбирается некоторая точка допустимой области G. Если х[0] - внутренняя точка множества G
(Рис. 1), то рассматриваемый метод является обычным градиентным методом:
x[k+l]
![]() x[k]
–akf’(x[k]),
k
x[k]
–akf’(x[k]),
k
![]() 0,
1, 2, ...,
0,
1, 2, ...,
где
 градиент
целевой функции f(х)
в точке x[k].
градиент
целевой функции f(х)
в точке x[k].
После
выхода на границу области G
в некоторой граничной точке х[k]
, k
![]() 0,
1, 2,..., движение в направлении антиградиента
-f’(х[k])
может вывести за пределы допустимого
множества (см. Рисунок 1). Поэтому
антиградиент проецируется на линейное
многообразие М,
аппроксимирующее участок границы в
окрестности точки х[k].
Двигаясь в направлении проекции вектора
-f'(x[k])
на многообразие М,
отыскивают новую точку х[k+1],
в которой f(х[k+1])
0,
1, 2,..., движение в направлении антиградиента
-f’(х[k])
может вывести за пределы допустимого
множества (см. Рисунок 1). Поэтому
антиградиент проецируется на линейное
многообразие М,
аппроксимирующее участок границы в
окрестности точки х[k].
Двигаясь в направлении проекции вектора
-f'(x[k])
на многообразие М,
отыскивают новую точку х[k+1],
в которой f(х[k+1])
![]() f(x[k]),
принимают х[k+1]
за исходное приближение и продолжают
процесс. Проведем более подробный анализ
данной процедуры.
f(x[k]),
принимают х[k+1]
за исходное приближение и продолжают
процесс. Проведем более подробный анализ
данной процедуры.
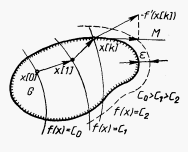
Рисунок 1. Геометрическая интерпретация метода проекции градиента
В точке х[k] часть ограничений-неравенств удовлетворяется как равенство:
hj(x)
![]() 0,
j
0,
j
![]() 1,
..., l; l < m.
Такие
ограничения называют активными.
1,
..., l; l < m.
Такие
ограничения называют активными.
Обозначим
через J
набор индексов j
(1
![]() j
j
![]() l)
этих ограничений. Их уравнения
соответствуют гиперповерхностям,
образующим границу области G
в окрестности точки х[k]
. В общем
случае эта граница является нелинейной
(см. рис.1). Ограничения hj(x),
j
l)
этих ограничений. Их уравнения
соответствуют гиперповерхностям,
образующим границу области G
в окрестности точки х[k]
. В общем
случае эта граница является нелинейной
(см. рис.1). Ограничения hj(x),
j
![]() J,
аппроксимируются гиперплоскостями,
касательными к ним в точке х[k]:
J,
аппроксимируются гиперплоскостями,
касательными к ним в точке х[k]:
![]()
Полученные гиперплоскости ограничивают некоторый многогранник М, аппроксимирующий допустимую область G в окрестности точки х[k] (см. Рис. 1).
Проекция
р[k]
антиградиента -f'(x[k])
на многогранник вычисляется по формуле
p[k]
![]()
[-f’(x[k])].
[-f’(x[k])].
Здесь
- оператор ортогонального проектирования,
определяемый выражением
![]() E
– AT(AAT)-1A,
где Е
- единичная матрица размерности пп;
E
– AT(AAT)-1A,
где Е
- единичная матрица размерности пп;
А
- матрица размеров l
n
. Она образуется строками –
транспонированными вектор-столбцами
градиентов активных ограничений
из множества
J:
аj=(hj)T,
j
![]() 1,
..., l.
1,
..., l.
(см. Лекцию 4 о конусах и проекциях – файл Моп_Л4_2сПМ.doc. Здесь x[k]Г(G) является началом координат, из которого проводится радиус-вектор f. Значит b=0, и это – проекция на подпространство, а не на многообразие ).
Далее
осуществляется спуск в выбранном
направлении: x[k+1]
![]() x[k]
+ kp[k].
Можно показать, что точка х[k+1]
является решением задачи минимизации
функции f(х)
в области G
тогда и только тогда, когда
[-f’(x[k])]
x[k]
+ kp[k].
Можно показать, что точка х[k+1]
является решением задачи минимизации
функции f(х)
в области G
тогда и только тогда, когда
[-f’(x[k])]
![]() 0,
т. е
0,
т. е![]() ,
и u
,
и u
![]() (u1,
..., ul)
(u1,
..., ul)
![]() (ATA)-1AT(-f
(х[k]))
> 0.
(ATA)-1AT(-f
(х[k]))
> 0.
Эти
условия означают, что антиградиент (-f
(х[k]))
целевой функции является линейной
комбинацией с неотрицательными
коэффициентами градиентов активных
ограничений hj(x)
![]() 0.
Напомним, что h
есть нормаль касательной гиперплоскости.
0.
Напомним, что h
есть нормаль касательной гиперплоскости.
В соответствии с изложенным, алгоритм метода проекции градиента состоит из следующих операций.
1. В точке х[k] определяется направление спуска р[k].
2. Находится величина шага k.
3. Определяется новое приближение х[k+1].
Рассмотрим детально каждую из этих операций.
1.
Определение направления спуска состоит
в следующем. Пусть найдена некоторая
точка х[k]
![]() G
и известен набор активных ограничений
hi(х[k])
G
и известен набор активных ограничений
hi(х[k])
![]() 0,
j
0,
j
![]() J.
На основании данной информации вычисляют
(-f
(х[k]))
и определяют проекцию
[-f
(х[k])].
При этом возможны два случая:
J.
На основании данной информации вычисляют
(-f
(х[k]))
и определяют проекцию
[-f
(х[k])].
При этом возможны два случая:
а) [-f’(х[k])] не равна 0. В качестве направления спуска р[k] принимают полученную проекцию;
б)
[-f
(х[k])]
![]() 0,
т. е.
0,
т. е.
![]()
Данное
выражение представляет собой систему
из п
уравнений для определения коэффициентов
иj.
Если все иj
![]() 0,
j
0,
j
![]() J,
то в
соответствии с вышеизложенным точка
х[k]
является решением задачи. Если же
некоторый компонент иq
J,
то в
соответствии с вышеизложенным точка
х[k]
является решением задачи. Если же
некоторый компонент иq
![]() 0,
то соответствующий ему градиент выводится
из матрицы А
и порождается новая проецирующая матрица
.
Она определит новое направление спуска.
0,
то соответствующий ему градиент выводится
из матрицы А
и порождается новая проецирующая матрица
.
Она определит новое направление спуска.
2.
Для определения величины шага k
целевая функция минимизируется по
направлению р[k]
при условии соблюдения ограничений
задачи с установленной точностью.
Последняя задается введением некоторого
положительного числа .
Считают, что точка х
удовлетворяет условиям задачи с заданной
точностью, если hi(х)
![]() ,
j
,
j
![]() 1,
..., m. Величина шага k
определяется решением задачи вида:
1,
..., m. Величина шага k
определяется решением задачи вида:
f(x[k] + р[k]) min;
hj(x[k]
+ р[k])
![]() ,
j
,
j
![]() 1,
..., m.
1,
..., m.
3. Определение нового приближения состоит в том, что очередная точка вычисляется по формуле
x[k+1]
![]() x[k]
+ k
р[k].
x[k]
+ k
р[k].
Признаком сходимости является стремление к нулю векторов р[k].
Рассмотренный метод является в некотором смысле аналогом градиентных методов для решения задач на безусловный экстремум, и ему свойствен их недостаток - медленная сходимость.
Приведем несколько утверждений, обосновывающих метод и оценивающих скорость его сходимости (изложение согласно книге: Сухарев и др. – Курс методов оптимизации)
Рассмотрим элементы
теории метода проекции градиента для
решения задачи следующего вида: ![]() (1)
(1)
где
![]() -
замкнутое выпуклое множество в
-
замкнутое выпуклое множество в
![]() ,
,
![]() дифференцируемая
функция на
дифференцируемая
функция на
![]() .
Пусть
.
Пусть
![]() является оптимальным решением задачи
(1).
является оптимальным решением задачи
(1).
Напомним вначале свойства проекции точки на множество.
Проекцией точки
![]() на множество
на множество
![]() называется точка
называется точка
![]() такая, что
такая, что
![]() ,
т.е. точка, ближайшая к a
среди всех точек из X.
Если
,
т.е. точка, ближайшая к a
среди всех точек из X.
Если
![]() ,
то
,
то
![]() ,
если X
замкнуто. Если же a
не принадлежит X,
и X -
открыто, то проекция
,
если X
замкнуто. Если же a
не принадлежит X,
и X -
открыто, то проекция
![]() не существует.
не существует.
Из определения
следует, что
![]() является решением следующей задачи
оптимизации:
является решением следующей задачи
оптимизации: ![]() .
(2)
.
(2)
Лемма 1 Пусть
![]() замкнутое выпуклое множество в
замкнутое выпуклое множество в
![]() .
Тогда
.
Тогда
1. Проекция
![]() любой точки
любой точки
![]() существует и единственна;
существует и единственна;
2. Точка
![]() является проекцией точки a
на множество X
является проекцией точки a
на множество X
![]() в том и только в том случае, если
в том и только в том случае, если ![]() (3)
(3)
3. Для всех точек
![]()
![]() справедливо
неравенство
справедливо
неравенство
![]() (4)
(4)
т.е. оператор проектирования обладает свойством нерастяжения расстояний.
Доказательство леммы приведено в [Сухарев, с. 225].
Сформулируем необходимое и достаточное условие оптимальности для выпуклой задачи.
Лемма 2. Пусть
множество X
выпукло и замкнуто, функция f
выпукла на X
и дифференцируема в точке
![]() .
Тогда
.
Тогда
![]() является решением задачи (1) в том и
только в том случае, если
является решением задачи (1) в том и
только в том случае, если
 (5)
(5)
при произвольном
![]() .
.
Доказательство леммы приведено в [Сухарев, с. 226].
Теперь рассмотрим алгоритм метода проекции градиента и его сходимость. В методе проекции градиента в качестве очередной точки приближения к решению задачи (1) выбирается проекция точки на множество X той точки, которая получается по градиентному методу:
![]() ,
где
,
где
![]() (6)
(6)
Коэффициенты
![]() можно выбирать различными способами.
(см. например, книги: Сухарев и др. или
Реклейтис и др.). Рассмотрим теорему о
сходимости проекции градиента с априорным
выбором коэффициентов
можно выбирать различными способами.
(см. например, книги: Сухарев и др. или
Реклейтис и др.). Рассмотрим теорему о
сходимости проекции градиента с априорным
выбором коэффициентов
![]() ,
то есть последовательность
,
то есть последовательность
![]() выбирают заранее, до начала вычислений
(например,
выбирают заранее, до начала вычислений
(например,
![]() ,
где k=0,1,2,...).
,
где k=0,1,2,...).
Теорема 1. Пусть
множество X
выпукло и замкнуто, функция f
сильно выпукла с константой
![]() и дифференцируема на X,
причем ее градиент удовлетворяет условию
Липшица:
и дифференцируема на X,
причем ее градиент удовлетворяет условию
Липшица:
![]() (7)
(7)
Тогда последовательность
![]() ,
генерируемая по формуле (6), где
,
генерируемая по формуле (6), где
![]() произвольная точка из X,
а
произвольная точка из X,
а
![]() сходится к решению
сходится к решению
![]() задачи (1) со скоростью геометрической
прогрессии:
задачи (1) со скоростью геометрической
прогрессии:
 (8)
(8)
где
![]()
Доказательство теоремы приведено в [Сухарев, с. 226].
Замечания:
-
В рассмотренном методе на каждой k-ой итерации требуется производить операцию проектирования точки на множество X, то есть решать задачу вида (2) при
 .
В некоторых случаях удается указать
явный вид проекции, например, если
множество X
шар, координатный параллелепипед,
полупространство, гиперплоскость,
аффинное множество. Однако, если X
задается с помощью более или менее
сложной системы равенств и неравенств,
то метод проекции градиента практически
неприменим, так как задача (2)
оказывается не проще исходной.
.
В некоторых случаях удается указать
явный вид проекции, например, если
множество X
шар, координатный параллелепипед,
полупространство, гиперплоскость,
аффинное множество. Однако, если X
задается с помощью более или менее
сложной системы равенств и неравенств,
то метод проекции градиента практически
неприменим, так как задача (2)
оказывается не проще исходной. -
В большинстве практических задач константы
 из теоремы 1 обычно неизвестны, что
затрудняет отыскание
из теоремы 1 обычно неизвестны, что
затрудняет отыскание
 .
Тогда можно использовать другие правила
выбора длины шага, например, различные
модификации метода наискорейшего
спуска с приближенным решением задач
одномерной минимизации по
.
Тогда можно использовать другие правила
выбора длины шага, например, различные
модификации метода наискорейшего
спуска с приближенным решением задач
одномерной минимизации по
 или правило дробления шага [Реклейтис
и др.].
или правило дробления шага [Реклейтис
и др.]. -
Используя идею проектирования, можно модифицировать применительно к задачам условной оптимизации и другие методы безусловной оптимизации, в том числе метод Ньютона и метод сопряженных направлений.
Пример: Решить методом проекции градиента:
![]() (9)
(9)
 . (10)
. (10)
Решение. Задачу
(9)-(10) решим методом проекции градиента,
используя соотношение (6). Выберем
начальное приближение
![]() .
Пусть шаг
.
Пусть шаг
![]() в выражении (6)
в выражении (6)
![]() равен
равен
![]() .
Критерий останова выберем следующий:
.
Критерий останова выберем следующий:
![]() ,
где
,
где
![]() .
.
Итерация 1. В
соответствии с выражением (6) определяем
![]() .
.
![]() ,
,
![]() .
.
Точка
![]() выходит за пределы области X.
Так как множество X-
координатный параллелепипед, то можно
указать явный вид проекции точки на
множество. Известно, что если
выходит за пределы области X.
Так как множество X-
координатный параллелепипед, то можно
указать явный вид проекции точки на
множество. Известно, что если
![]() – координатный параллелепипед, то
– координатный параллелепипед, то
![]() :
:
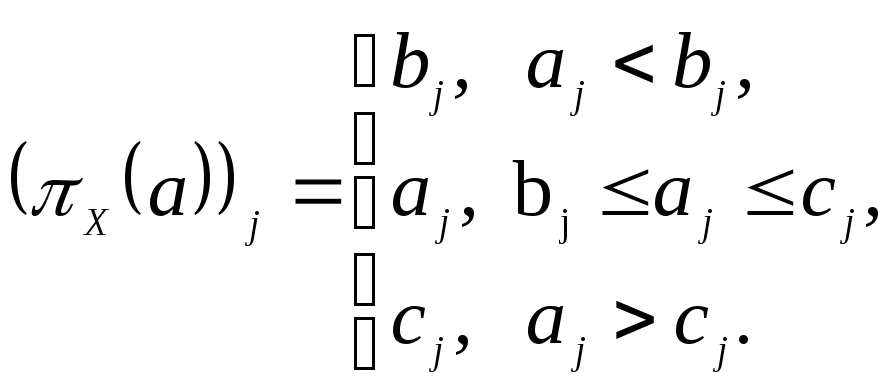 (см.[Сухарев, с.227], а также лекцию о
проекциях.
(см.[Сухарев, с.227], а также лекцию о
проекциях.
В нашем случае
![]() ,
,
![]() .
.
Так как
![]() ,
то проверяем критерий останова:
,
то проверяем критерий останова:
![]() .
Критерий останова не выполняется,
значит, переходим к следующей итерации.
.
Критерий останова не выполняется,
значит, переходим к следующей итерации.
Итерация 2. В соответствии с выражением (6) определяем
![]() .
.
![]() ,
,
![]() .
.
Точка
![]() выходит за пределы области X.
выходит за пределы области X.
Значит, ![]() ,
,
![]() .
. ![]() .
.
Критерий останова выполняется, значит, процесс вычислений закончен.
Вспомним некоторые определения и теоремы из прошлых лекций по математическому программированию.
Система из m линейных неравенств (ЛН) Ax b (1)
называется разрешимой, если x≥0: Ax b, xRn, bRm и неразрешимой - в противном случае.
ОзЛП max c, x Ax b (2)
разрешима, когда разрешима система (1) и максимум в (2) достигается.
Определение 1. Линейное неравенство c, x d (3)
является следствием разрешимой системы линейных неравенств (1), если для любого x, удовлетворяющего (1), выполнено (3).
Пусть
![]() - вектор-строка матрицы А,
т.е. коэффициенты i-го
неравенства из (1);
- вектор-строка матрицы А,
т.е. коэффициенты i-го
неравенства из (1);
![]() .
.
Лемма 1 (Фаркаша о неразрешимости). Система ЛН (1) неразрешима тогда и только тогда, когда разрешима система
![]()
Теорема 1. (Куна-Таккера) будет использована в следующей форме
Пусть
функции
![]() ,
имеют непрерывные частные производные
на некотором открытом множестве Rn,
содержащем точку x*.
Если x* является
точкой минимума функции
,
имеют непрерывные частные производные
на некотором открытом множестве Rn,
содержащем точку x*.
Если x* является
точкой минимума функции
![]() при
ограничениях
при
ограничениях
![]() ,
удовлетворяющих условию регулярности
в виде линейной независимости векторов
,
удовлетворяющих условию регулярности
в виде линейной независимости векторов
![]() ,
то существуют такие неотрицательные
множители Лагранжа
,
то существуют такие неотрицательные
множители Лагранжа
![]() ,
что
,
что
![]() (4)
(4)
![]() (5)
(5)
Определим функцию Лагранжа как обычно:
![]() (6)
(6)
Тогда теорему Куна-Таккера можно записать в виде
= (m)T, i≥0,
![]() (7)
(7)
![]() (8)
(8)
![]() (9)
(9)
Заметим, что множители Лагранжа i в задаче НП с ограничениями-равенствами являются знако-неопределенными, тогда как в теореме Куна-Таккера они должны быть неотрицательными.