

2. Гнучкість структурно-компонувальних схем ртк
Структурно-компонувальна гнучкість визначається швидкістю переналагодження ГВС з переходом на запуск виробу іншого виду. В найбільшій степені забезпечує автоматизацію процесу одержання керуючої інформації для ГВС і, зокрема, інтеграцією з системою автоматизованого проектування виробництва, технологічною підготовкою виробництва та системою автоматичного керування, а також стандартизацією використаних інструментів, матеріалів, заготовок та ін. При чому необхідно врахувати і трудоємність переналагодження ГВС, а також вплив на її структурну гнучкість, яка базується на гнучкості структурно-компонувальної схеми РТК. Остання визначається принциповою можливістю гнучкою збиральною робото технічною системою (ГЗРТС) здійснити запуск виробу в межах групи модифікацій, можливістю зміни послідовності технологічного маршруту в середині структурно-компонувальної системи (СКС), степінню гнучкості автоматизованих транспортно-складських систем.
Структура
ГЗРТС може бути представлена матричною
моделлю,
або матрицею зв’язків структурних
складових ГЗРТС. Зв'язок структурних
компонентів обумовлений мережею
транспортних шляхів автоматизованої
транспортної системи. Матриця зв’язків
 представляє
собою квадратну матрицю виду:
представляє
собою квадратну матрицю виду:

елементи якої є нульовими змінними і приймають значення в залежності від наявності транспортних шляхів:
1 ,
якщо і-та і j–та структурні компоненти
зв’язані
,
якщо і-та і j–та структурні компоненти
зв’язані
Тij3 = транспортним шляхом;
0, в протилежному випадку.
Головні діагональні елементи t11, t22, …, tnn цієї матриці рівні нулю, верхня трикутна матриця (і<j) характеризує прямі транспортні шляхи, нижня трикутна матриця (i>j) характеризує зворотні транспортні шляхи.
Іншими словами, конкретним типам СКС ГЗРТС відповідають свої види матриць зв’язків, що дозволяє на основі них зробити аналіз варіантів компонувальних рішень ГЗРТС.
Кількісно гнучкість структурно-компонувальної схеми ГЗРТС може бути визначена коефіцієнтом зв’язності Кт СКС, для чого зв’язність структурних компонентів відображається у вигляді невизначеного графа G=(P,1), в якому вершини Р суть компоненти, а дуги 1 характеризують наявність зв’язків між ними. Тоді:
 ,
(2.1)
,
(2.1)
де qмах – число максимально можливих зв’язків;
qф – число фактичних зв’язків, які є в дійсній схемі РТК.
Таким чином, Кт=0 при найвищому ступені структурно-компонувальної гнучкості; із збільшенням величини Кт ступінь гнучкості знижується.
Для РТК – 1 запишемо матрицю і граф зв’язків, а також розрахуємо коефіцієнт зв’язності.
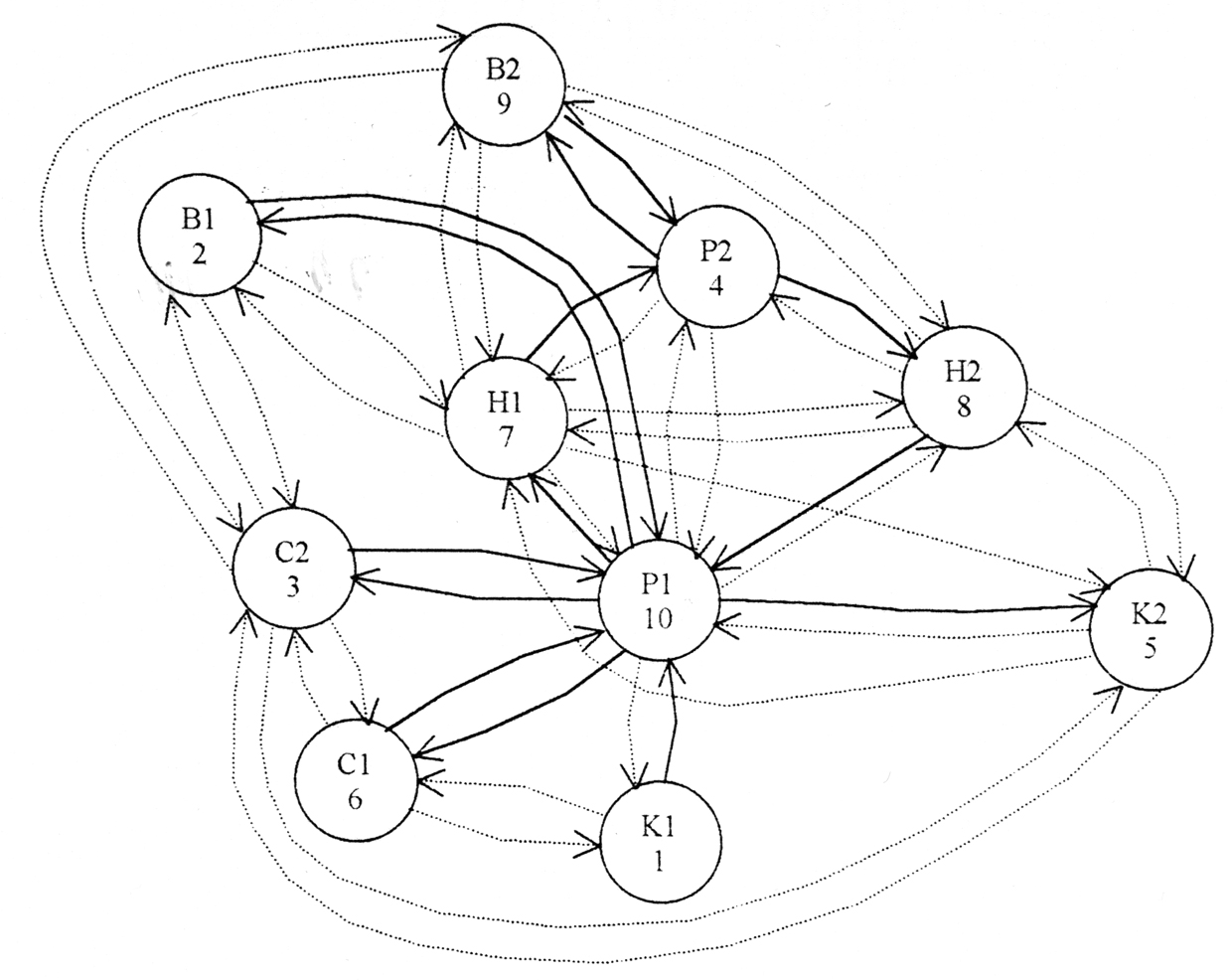
Рис 2.1 – Граф зв’язків структурних компонентів РТК–1
Т ут:
транспортні шляхи, які необхідні
для виготовлення виробу (деталі) згідно
з технологічним процесом;
ут:
транспортні шляхи, які необхідні
для виготовлення виробу (деталі) згідно
з технологічним процесом;
 транспортні шляхи, які можливі
між компонентами РТК;
транспортні шляхи, які можливі
між компонентами РТК;
Р1,Р2 – промислові роботи;
В1,В2 –верстати для обробки заготовок;
Н1,Н2 – нагромаджувачі;
С1,С2 – столи;
К1,К2 – конвеєри.
Матриця зв’язків структурних компонентів РТК–1


=
Коефіцієнт зв’язності структурних компонентів РТК:

де qф=14 – число фактичних зв’язків.
Як визначено раніше, коефіцієнт зв’язності Кт стає рівним нулю, якщо РТК досягає найвищого ступеня структурно-компонувальної гнучкості. Очевидно можна говорити, що оптимальну структуру РТК отримаємо за критерієм структурно-компонувальної гнучкості Кт=0. Виходячи з виразу для коефіцієнта зв’язності Кт, запишемо умову вибору числа фактичних зв’язків qф для оптимально гнучкого РТК за цим критерієм:
 ;
;
З цього виразу знайдемо оптимальне число фактичних зв’язків qф= qФопт:
 (2.2)
(2.2)
Отже, для заданого числа компонентів РТК (тобто технологічного обладнання, визначеного алгоритмом функціонування технологічного процесу) однозначно визначаємо величину qФопт. Так для РТК–1 з числом його компонентів Р=10 отримаємо величину
 .
.
Цю величину ряд авторів в літературі називають максимальним числом зв’язків qмах.
Аналіз виразу дає можливість зробити такий висновок:
зі збільшенням номенклатури компонентів системи, тобто величини Р, і сталій кількості зв’язків, величина Кт збільшується, а це означає погіршення структурно-компонувальної гнучкості системи.
Якщо обірвати деякі зв’язки між компонентами РТК, то в цьому випадку зменшиться значення qФ, а величина коефіцієнта зв’язності Кт зросте.
Звідси випливає такий висновок:
зменшення кількості зв’язків при незмінній кількості номенклатури компонентів РТК дає погіршення структурно-компонувальної гнучкості ГЗ РТС.