

7. Определение мощности двигателя привода.
Мощность электродвигателей приводов станка определяется предварительно до разработки его кинематической схемы и окончательно уточняется после разработки конструкции и испытаний станка на мощность.
Если приводы оснащены индивидуальными двигателями, то мощность каждого из них определяется в отдельности. Если двигатель является общим для нескольких приводов станка, то для обеспечения их одновременной работы мощность двигателя должна определяться с учетом этого условия.
Потребляемая приводом мощность N (мощность двигателя) определяется зависимостью
N = Nэ + Nхх + Nдоп , (3.16)
где Nэ – эффективная (полезная) мощность;
Nхх – мощность холостого хода – мощность, затрачиваемая на преодоление сопротивлений в приводе без нагрузки;
Nдоп – дополнительные потери мощности, возникающие в приводе под нагрузкой.
Величины Nхх и Nдоп неизвестны на стадии проектирования кинематической схемы и могут быть определены только экспериментально при испытании привода на мощность. Поэтому эти величины учитывают с помощью кпд.
Мощность двигателя главного движения

или, учитывая возможность перегрузки электродвигателя на 25 %,

где η – кпд цепи главного движения.
При приближенных расчетах принимают следующие значения η:
– для станков с вращательным главным движением η = 0,7… 0,85;
– для станков с возвратно-поступательным главным движением η=0,6… 0,7.
Если кинематика проектируемого станка аналогична известному
станку (прототипу), то принимают
η = Пηi , (3.19)
где ηi – кпд i-того элемента (зубчатой передачи, подшипника), входящего в привод. Значение η привода уточняется по (3.19) после разработки кинематической схемы привода с использованием приведенных в литературе справочных данных о кпд входящих в привод передач и подшипников.
Мощность Nп двигателя привода подачи вычисляется по формуле
 ,
(3.20)
,
(3.20)
где n – кпд цепи подач;
Nэп – эффективная мощность, необходимая для осуществления движения подачи:
Nэп = АQνs, (3.21)
где А – числовой коэффициент;
Q – тяговое усилие;
vs – скорость движения подачи.
Величина Q определяется по известным зависимостям [25, 30].
Если приводы главного движения и подачи имеют общий двигатель, то мощность, необходимая для осуществления движения подачи, принимается в процентах от мощности главного движения: для токарных станков 3 – 4 %; для сверлильных – 4 – 5 %; для фрезерных – 15 – 20 %. С учетом этого определяется мощность двигателя.
8. Варианты порядка расположения и порядок переключения групповых передач. График переключения групповых передач.
Порядок расположения и последовательность переключения групповых передач в приводе
Группы передач в порядке расположения обозначаются индексами 1, 2, 3… m – соответственно первая р1, вторая р2 и т. д. до последней рm.
Число передач в любой группе pi может быть принято равным любому из множителей ai, входящих в выражение (3.23). Поэтому в общем случае число вариантов порядка расположения равно количеству перестановок из m элементов по m, т. е. уk = m!, где уk– количество вариантов расположения групповых передач (конструктивных вариантов коробки).
В частном случае, когда q групп имеют одинаковое число передач,

В данном случае две группы имеют одинаковое число передач
(q = 2), поэтому

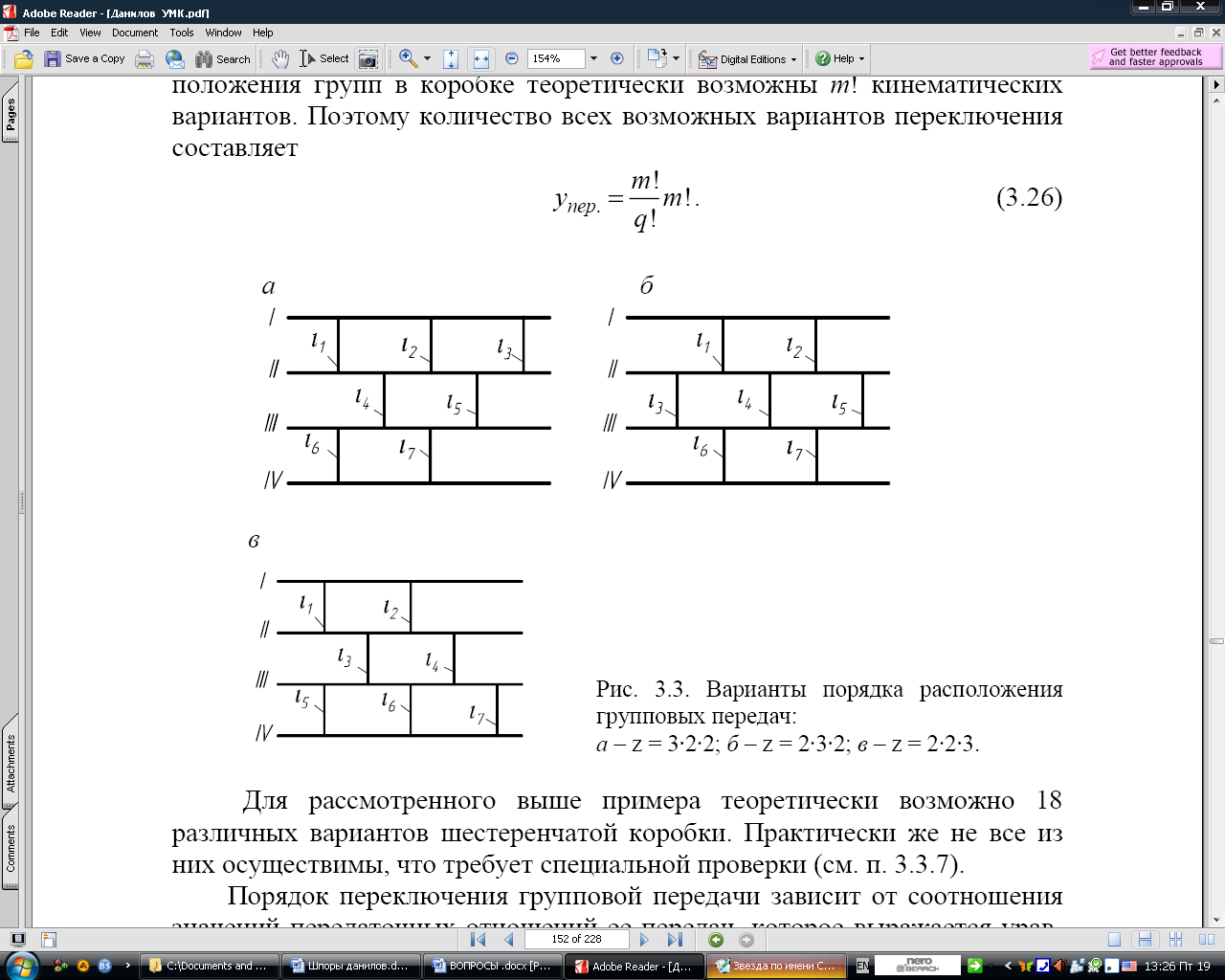
Следовательно, коробка может быть выполнена в соответствии с одним из трех возможных вариантов порядка расположения групповых передач:
1. z = p1 p2p3 = 3 . 2 . 2.
2. z = p1p2p3 = 2 . 3 . 2.
3. z = p1p2p3 = 2 . 2 . 3.
Зубчатые передачи коробки скоростей, принадлежащие различным группам, обычно имеют разные модули, которые увеличиваются вдоль кинематической цепи. Отсюда, чем больше зубчатых колес находится в первых группах, тем меньше вес шестеренчатой коробки. Поэтому из возможных вариантов порядка расположения групповых передач предпочти-
телен тот, при котором число передач в группах уменьшается вдоль кинематической цепи, т. е.
p1 > p2 > … > pm. (3.25)
В порядке переключения группа передач может быть:
– основной (p0) – переключается в первую очередь для получения соседнего значения частоты вращения;
– I-й переборной – переключается во вторую очередь;
– II-й переборной – переключается в третью очередь и т. д.
Каждая группа передач в коробке может быть основной, первой переборной и т. д. Следовательно, для каждого конструктивного варианта расположения групп в коробке теоретически возможны m! Кинематических вариантов. Поэтому количество всех возможных вариантов переключения составляет

Для рассмотренного выше примера теоретически возможно 18
различных вариантов шестеренчатой коробки. Практически же не все из них осуществимы, что требует специальной проверки Порядок переключения групповой передачи зависит от соотношения значений передаточных отношений ее передач, которое выражается уравнением настройки групповой передачи.
Графическое представление порядка переключения груп-
повых передач
Последовательность переключения групповых передач в проектируемом приводе для получения всех значений ряда частот вращения наглядно можно представить в виде графика переключения. Рассмотрим его построение для коробки (см. рис. 3.3, б) с формулой структуры привода
z= 2(1) . 3(2) . 2(6), при условии, что i1 < i2; i3 < i4 < i5; i6< i7 .
При частоте n0 ведущего вала I ведомый вал IV имеет 12 различных частот вращения в диапазоне от n1 до n12 .
В соответствии с приведенной формулой структуры привода порядок расположения групповых передач совпадает с порядком их переключения,поэтому искомые значения частот вращения ведомого вала определяются следующими уравнениями кинематических цепей:
n1 = n0 . i1 . i3 . i6 n7 = n0 . i1 . i3 . i7
n2 = n0 . i2 . i3 . i6 n8 = n0 . i2 . i3 . i7
n3 = n0 . i1 . i4 . i6 n9 = n0 . i1 . i4 . i7
n4 = n0 . i2 . i4 . i6 n10 = n0 . i2 . i4 . i7
n5 = n0 . i1 . i5 . i6 n11 = n0 . i1 . i5 . i7
n6 = n0 . i2 . i5 . i6 n12 = n0 . i2 . i5 . i7.
Последовательность включения передач i1 – i7 , соответствующая
этим уравнениям, приведена на рис. 3.6, который представляет собой график переключения групповых передач.
График показывает, что для получения соседних значений частоты вращения ведомого вала необходимо каждый раз переключать первую в порядке переключения группу передач р1, которая является основной р0 в порядке переключения. Вторая в порядке расположения группа р2 является первой переборной рI. Она переключается после каждых двух переключений основной группы и создает передаточные отношения i3, i4 и i5. Последняя в порядке расположения и переключения группа передач (вторая
переборная рII) переключается с i6 на i7, только когда использованы всевозможности первых двух групп.
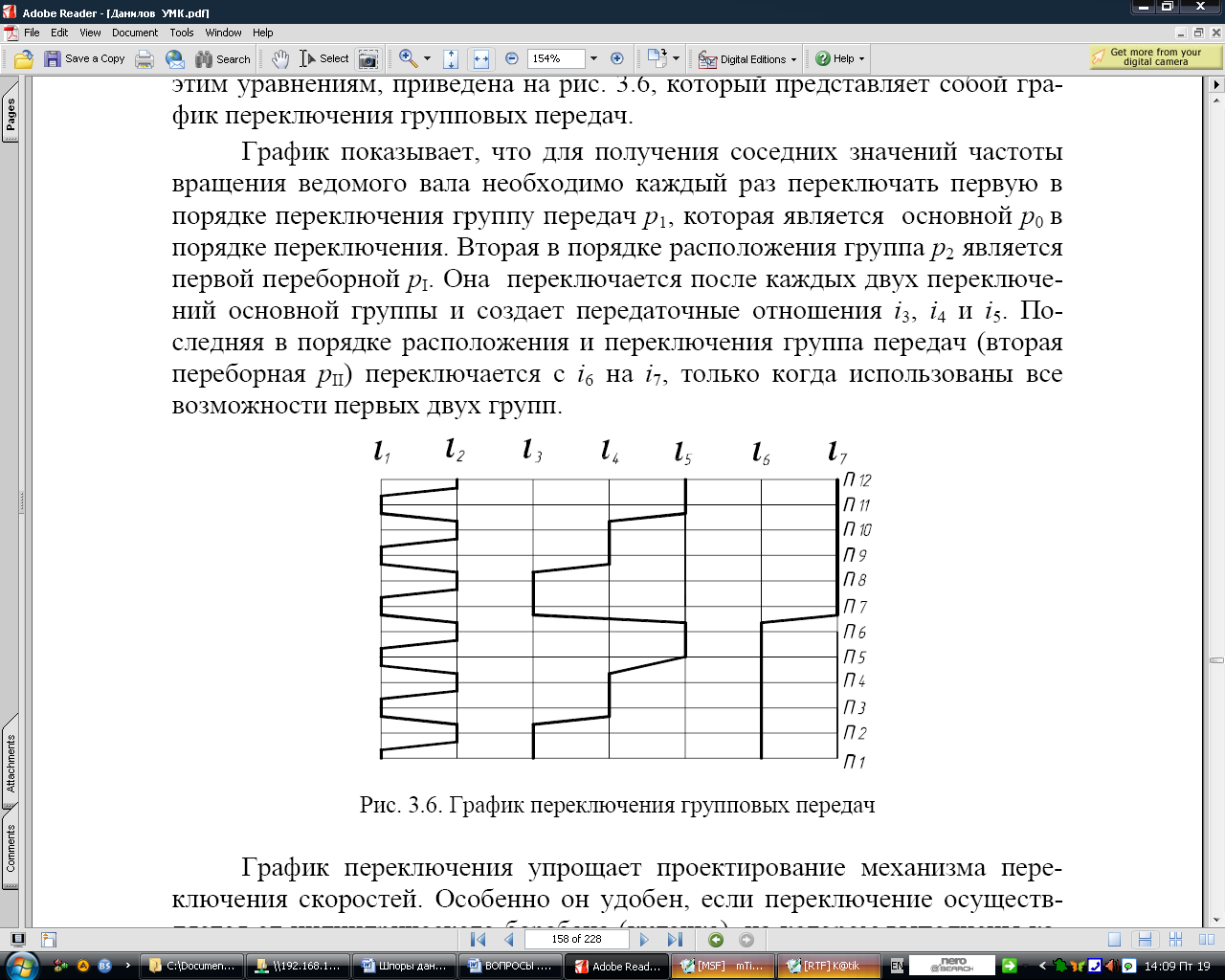
График переключения упрощает проектирование механизма переключения скоростей. Особенно он удобен, если переключение осуществляется от цилиндрического барабана (кулачка), на котором выполнены канавки для перемещения с помощью вилок блоков зубчатых колес. Закон перемещения блоков определяется графиком переключения передач, который поэтому является основой для построения развертки цилиндрического барабана механизма переключения скоростей.