

4.Синтез кинематической структуры простых и сложных кинематических групп
Кинематическая структура устанавливает основные функциональные связи исполнительных органов и механизмов станка, необходимые для реализации принятой схемы формообразования.
Основные принципы анализа кинематической структуры всех станков:
-любое исполнительное движение в станке создается соответствующей кинематической группой, простое движение создается простой, а сложное –сложной;
-каждая кинематическая группа состоит из источника движения, внешней и внутренней связей;
-внутренняя связь обеспечивает траекторию создаваемого движения, а внешняя – его скорость и направление, а также передачу энергии от источника движения во внутреннюю связь;
-настройка параметров создаваемого группой исполнительного движения обеспечивается соответствующими органами, размещенными определенным образом во внешней и внутренних связях;
-совокупность всех кинематических групп и межгрупповых связей образует кинематическую структуру станка.
Различают общую и частную кинематическую структуры станка. Частная кинематическая структура представляет собой совокупность кинематических групп, создающих исполнительные движения, необходимые для обработки на станке заданной поверхности. Например, на универсальном зубофрезерном станке могут нарезаться прямозубые и косозубые цилиндрические шестерни, а также червячные колеса. Обработке каждого из этих изделий соответствуе определенная частная структура станка.
Объединение множества частных структур представляют собой общую кинематическую структуру станка.
Простые кинематические группы, создающие простые (одноэлементарные) движения, не имеют кинематических цепей во внутренней связи.Траектория исполнительного движения обеспечивается в простых группах кинематической парой (вращательной или поступательной), подвижным звеном которой является исполнительный орган.
Кинематические группы, имеющие во внутренней связи одну и более кинематических цепей, являются сложными. К ним относятся группы винтовых движений.
В качестве примера на рис изображены структурные схемы двух простых кинематических групп. Внутренняя связь группы движения резания Фv (В1) рис а, представляет собой вращательную пару, образованную шпинделем 1 и его опорами в корпусе 2.
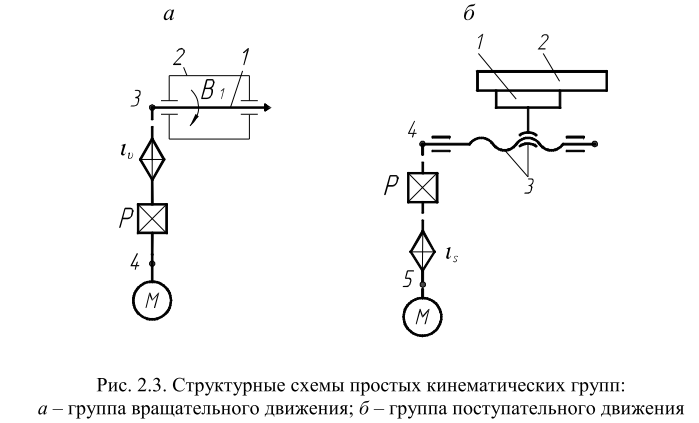
Данное движение простое с замкнутой траекторией в виде окружности и поэтому в общем случае настраивается по двум параметрам: на скорость – органом iv и направление –реверсом Р. Оба органа настройки расположены во внешней связи 4-Р-iv-3.
Кинематическая группа прямолинейного движения подачи Фs (П2) рисб, имеет внутреннюю связь в виде поступательной пары между исполнительным органом 1 и неподвижными направляющими 2. Внешняя связь содержит органы настройки на скорость is, направление (Р) и тяговое устройство3. Настройка на упть и исходное положение исполнительного органа осуществляется посредством упоров. При использовании регулируемых по частоте и направлению вращения двигателей функции органов настройки скорости и направления движения в рассмотренных примерах система управления.
Для синтеза структуры любой кинематической группы необходимо:
– выбрать исполнительные кинематические пары в соответствии с создаваемыми группой элементарными движениями и ее тяговые устройства;
– соединить между собой кинематическими цепями внутренней связи подвижные звенья исполнительных пар (для сложных групп);
– выбрать положение звена соединения внутренней и внешней связей группы;
– соединить кинематической цепью внешней связи двигатель и звено соединения связей;
– разместить во внешней и внутренней связях органы настройки параметров создаваемого группой исполнительного движения.
Построение внешней и внутренней связей должно удовлетворять принятому способу соединения кинематических групп между собой.