

33. Направляющие жидкостного трения. Гидростатические направляющие. Конструкция направляющих, основные характеристики. Преимущества, область применения.
Направляющие жидкостного трения: гидростатические и гидродинамические.
Гидростатические направляющие более широко распространены в металлорежущих станках. Они обеспечивают жидкостную смазку при любых скоростях скольжения, а значит, и равномерность, и высокую чувствительность точных исполнительных движений. Недостатком гидростатических направляющих является сложность системы смазывания и необходимость специальных устройств для фиксации перемещаемого узла в заданной позиции.
Характеристики
-Взаимозаменяемые компактные направляющие; -Линейные направляющие качения; -Неограниченный срок службы; -Идеально адоптированы для возвратно-поступательного движения; -Отсутствие изменения направления движения для тел вращения; -Отсутствие трения при малых перемещениях, равномерность движения; -Высокая точность позиционирования, отсутствие люфтов; -Гашение колебаний с помощью заполненного маслом смазочного зазора; -Отсутствие вибрации тел вращения; -Максимально возможное гашение вибраций при механической обработке ; -Защита от столкновений
-Отсутствие износа, отсутствие контакта между металлическими поверхностями
-Скорость до 50 м/с; -Термостабильность, отвод тепла непосредственно через смазочное масло; -Высокая точность и повторяемость в процессе механической обработки
Гидростатические направляющие (рисунок)
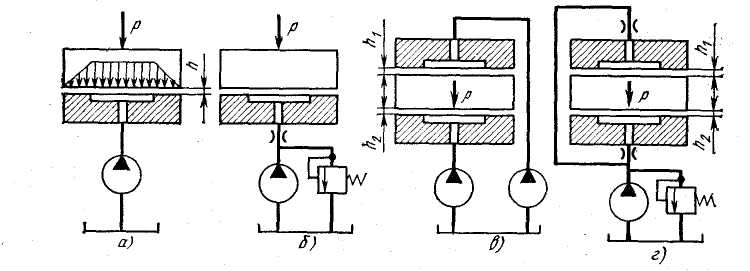
Рисунок Схемы гидростатических направляющих(а, б — открытых; в, г — замкнутых)
Эти направляющие имеют карманы, в которые под давлением подается масло. Вытекая наружу через зазор h, оно создает масляную подушку по всей площади контакта.Преимущества: небольшое трение, высокую демпфирующую способность, обеспечивают высокую плавность хода и малые усилия перемещения, практически неизнашиваемы.
Применение
-Направляющие при наличии и отсутствии охвата; -Блоки направляющих с линейными двигателями
-Компактные направляющие для замены линейных направляющих качения
-Круглые направляющие для одновременно линейного и вращательного движения
-V-образные плоские направляющие

применение: быстроколеблющиеся суппорта.
-Рельсовые направляющие
-Направляющие пластины
34. Направляющие качения. Конструктивные разновидности. Открытые и закрытые направляющие. Преимущества и недостатки. Область применения. Расчет направляющих качения.
Направляющие качения имеют хорошие характеристики трения, равномерность и плавность движения при малых скоростях, точность установочных перемещений и длительно сохраняют точность; в них малое тепловыделение, их просто смазывать. Недостатками направляющих качения по сравнению с направляющими скольжения являются высокая стоимость, трудоемкость изготовления, пониженное демпфирование, повышенная чувствительность к загрязнениям.
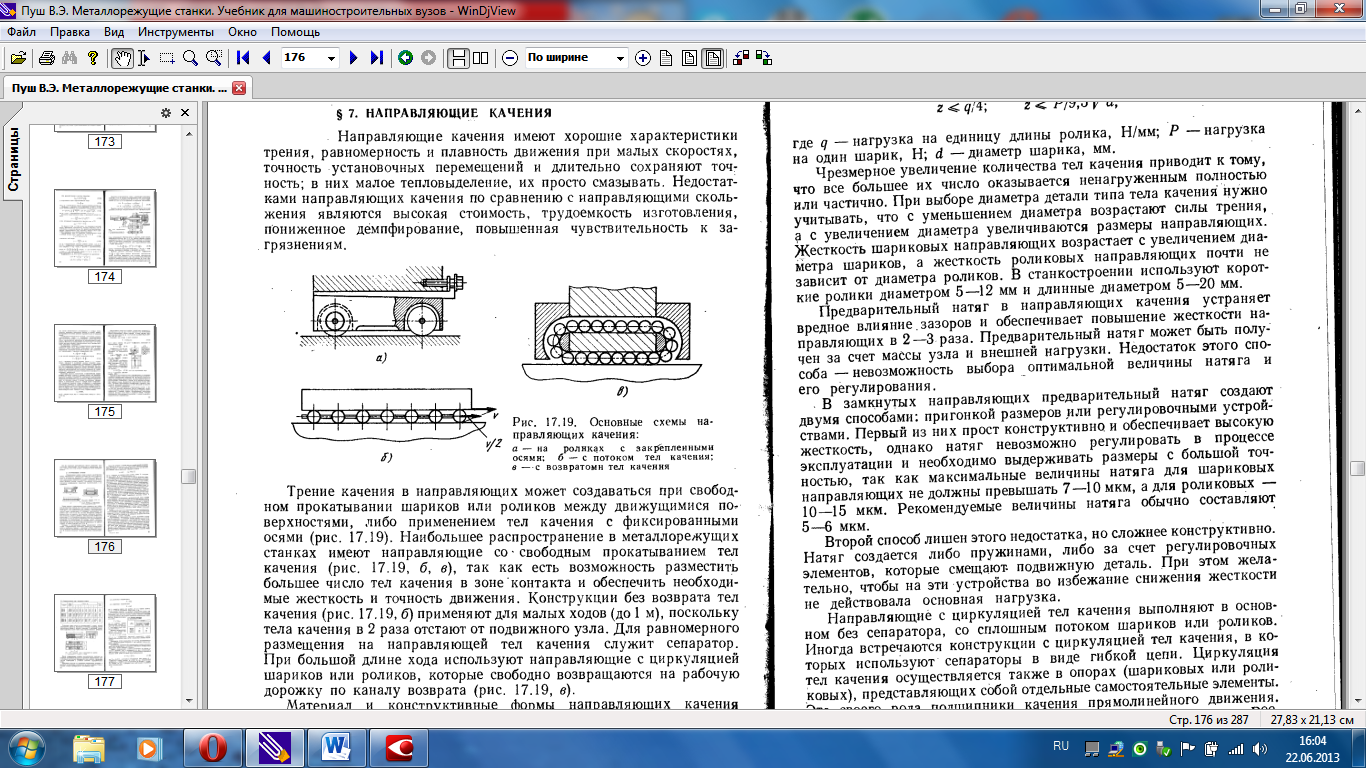
Трение качения в направляющих может создаваться при свободном прокатывании шариков или роликов между движущимися поверхностями, либо применением тел качения с фиксированными осями (рис). Наибольшее распространение в металлорежущих станках имеют направляющие со свободным прокатыванием тел качения,так как есть возможность разместить большее число тел качения в зоне контакта и обеспечить необходимые жесткость и точность движения. Конструкции без возврата тел качения (рис.б) применяют для малых ходов (до 1 м), поскольку тела качения в 2 раза отстают от подвижного узла. Для равномерного размещения на направляющей тел качения служит сепаратор. При большой длине хода используют направляющие с циркуляцией шариков или роликов, которые свободно возвращаются на рабочую дорожку по каналу возврата (рис.в).Материал и конструктивные формы направляющих качения сходны с направляющими скольжения. Однако для направляющих качения необходимы твердые и однородные рабочие поверхности. Чугун применяют сравнительно редко лишь при небольших нагрузках. В основном используют стальные закаленные направляющие.
Конструктивные разновидности - от траектории движения подвижного узла направляющие могут быть прямолинейного и кругового движения. Их делят также на горизонтальные, вертикальные и наклонные. По форме поперечного сечения наиболее распространены прямоугольные (плоские), треугольные (призматические), трапециевидные (типа Ласточкин хвост) и круглые направляющие.
Расчет направляющих качения предусматривает проверку на предельно допустимую нагрузку по прочности поверхностного слоя и отсутствие пластических деформаций в зоне контакта, определение упругих перемещений и уточнение величины предварительного натяга.
Предельные нагрузки по контактным напряжениям стальных и чугунных направляющих подсчитывают на основе формулы Герца— Беляева, которая преобразуется к простейшему виду
для роликовых направляющих Р=Кbd
для шариковых направляющих Р = Kd2
где d — диаметр шарика или ролика, см; Ь — ширина ролика, см; К—условное напряжение, Н/см2
Фактическую нагрузку на наиболее нагруженный шарик или ролик определяют методом, применяемым при расчете направляющих скольжения; при этом тела качения условно заменяют сплошным упругим основанием, для которого определяют максимальное давление рmах. Нагрузка на шарик или ролик
P=btрmах
где b —условная ширина направляющей (ширина ролика или диаметр шарика); t — шаг между осями рабочих тел качения.
Жесткость направляющих качения для условия идеального изготовления
б = cpq б = сшР,
где ср, сш — коэффициенты контактной податливости соответственно для роликовых (мкм-см/Н) и шариковых (мкм/Н) направляющих.
Зависимости справедливы при наличии предварительного натяга (предварительной нагрузки) и при действии перекашивающих моментов.
Трение в направляющих качения практически не зависит от скорости движения узла и складывается из двух составляющих, одна из которых постоянна, а вторая пропорциональна нормальной нагрузке. Сила трения на одной грани направляющих

где Т0 = 4—5 Н —постоянная составляющая силы трения; /н — коэффициент трения качения, fH = 0,001 см для направляющих из стали и fH = 0,0025 см для направляющих из чугуна; г — радиус тел качения, см; PN — суммарная сила, действующая на рабочую грань направляющей.
Область применения.Направляющие удерживают движущиеся части машины и предоставляют направление их поступательному движению. Наиболее распространенными в машиностроении является направляющие для обеспечения прямолинейного движения деталей. Как опоры деталей с поступательным движением направляющие используют: в поршневых машинах в кузнечно-прессовом оборудовании; в металлорежущих станках в подъемно-транспортных и т.п. Направляющие для прямолинейного движения применяются в различных приборах и измер. устройствах.