

17. Проектирование кинематики привода со сложенной структурой
Структура,
представляющая собой соединение
нескольких (обычно не более двух) простых
множительных структур, называется
сложенной. В этом случае число ступеней
zскорости
равно сумме чисел ступеней скорости
первой z1и
второй z2составляющих
структур. Для упрощения конструкции
привода составляющие структуры, как
правило, имеют общую часть, обеспечивающую
z0ступеней
скорости, тогда
 Поэтому
Поэтому  Общая
часть является основной и служит для
получения всех ступеней скорости
выходного звена привода. Структуры,
обеспечивающие z1и
z2
ступеней
скорости, называются дополнительными
и используются для получения только
части ступеней скорости выходного
звена: первая с более низкими, а другая
с более высокими значениями частоты
вращения. На практике часто применяется
вариант сложенной структуры привода,
когда структуры, создающие z0и
z1ступеней
скорости, совпадают. В этом случае
Общая
часть является основной и служит для
получения всех ступеней скорости
выходного звена привода. Структуры,
обеспечивающие z1и
z2
ступеней
скорости, называются дополнительными
и используются для получения только
части ступеней скорости выходного
звена: первая с более низкими, а другая
с более высокими значениями частоты
вращения. На практике часто применяется
вариант сложенной структуры привода,
когда структуры, создающие z0и
z1ступеней
скорости, совпадают. В этом случае
 где
яд-
число ступеней скорости, создаваемых
дополнительной структурой.Объединение
составляющих структур в сложенную
структуру осуществляется с помощью
переключаемых зубчатых передач или
муфт. Например, z0
ступеней скорости, относящихся к верхней
области диапазона регулирования и
создаваемых основной структурой,
передаются на шпиндель IV
при
смещении колеса 9
влево
и зацеплении кулачковой муфты. Нижняя
область регулирования скорости привода
обеспечивается последовательным
соединением основной z0и
дополнительной zдструктур
и подключением последней к шпинделю
через передачу z8-
z9.
Такой способ построения сложенной
структуры характерен, в частности, для
приводов главного движения универсальных
токарно-винторезных станков. Для
построения структурной сетки сложенного
привода необходимо определить
характеристики групп передач и составить
формулу структуры привода. Характеристики
групп основной структуры определяются
так же, как и для обычной множительной
структуры. Характеристика любой группы
дополнительной структуры равна
произведению числа скоростей z0основной
структуры и числа ступеней скорости,
создаваемых предшествующими группами
дополнительной структуры. Например,
если z0=
р1р2,
гд
= р3р4,
причем
р1=
ро=
2, р2=
р1
= 3,
р3=
рII
= 2,
р4=
рIII
= 2,
то x1
= 1, x2=
2, х3=
z0
= 2 ∙ 3 = 6, x4=
2 ∙ z0
= 2 ∙ 6 = 12, то структурная формула привода
имеет вид z=
2(1)3(2)[1 + 2(6) ∙ 2(12)]. Для z=
12 предпочтителен вариант сложенной
структуры, выражаемой формулой z=
6 [1+11]. В этом случае структурная формула
привода имеет вид: z=
3(1)2(3)[1+1 ∙ 1]. Особенностью построения
структурной сетки сложенного привода
является то, что вначале строятся сетки
для составляющих структур затем -
совмещенная структурная сетка, а по ней
график частот вращения. Так как основная
и дополнительная структуры сложенного
привода являются простыми множительными,
то структурные сетки для них строятся
по общей методике.
где
яд-
число ступеней скорости, создаваемых
дополнительной структурой.Объединение
составляющих структур в сложенную
структуру осуществляется с помощью
переключаемых зубчатых передач или
муфт. Например, z0
ступеней скорости, относящихся к верхней
области диапазона регулирования и
создаваемых основной структурой,
передаются на шпиндель IV
при
смещении колеса 9
влево
и зацеплении кулачковой муфты. Нижняя
область регулирования скорости привода
обеспечивается последовательным
соединением основной z0и
дополнительной zдструктур
и подключением последней к шпинделю
через передачу z8-
z9.
Такой способ построения сложенной
структуры характерен, в частности, для
приводов главного движения универсальных
токарно-винторезных станков. Для
построения структурной сетки сложенного
привода необходимо определить
характеристики групп передач и составить
формулу структуры привода. Характеристики
групп основной структуры определяются
так же, как и для обычной множительной
структуры. Характеристика любой группы
дополнительной структуры равна
произведению числа скоростей z0основной
структуры и числа ступеней скорости,
создаваемых предшествующими группами
дополнительной структуры. Например,
если z0=
р1р2,
гд
= р3р4,
причем
р1=
ро=
2, р2=
р1
= 3,
р3=
рII
= 2,
р4=
рIII
= 2,
то x1
= 1, x2=
2, х3=
z0
= 2 ∙ 3 = 6, x4=
2 ∙ z0
= 2 ∙ 6 = 12, то структурная формула привода
имеет вид z=
2(1)3(2)[1 + 2(6) ∙ 2(12)]. Для z=
12 предпочтителен вариант сложенной
структуры, выражаемой формулой z=
6 [1+11]. В этом случае структурная формула
привода имеет вид: z=
3(1)2(3)[1+1 ∙ 1]. Особенностью построения
структурной сетки сложенного привода
является то, что вначале строятся сетки
для составляющих структур затем -
совмещенная структурная сетка, а по ней
график частот вращения. Так как основная
и дополнительная структуры сложенного
привода являются простыми множительными,
то структурные сетки для них строятся
по общей методике.
18. Проектирование кинематики привода со ступенью возврата
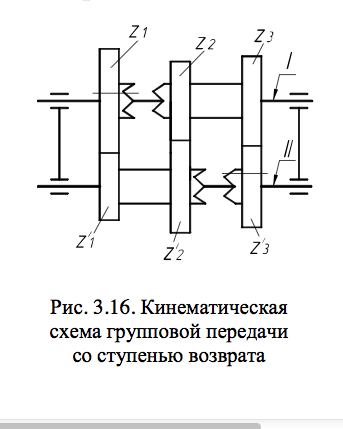 Группа
со ступенью возврата устанавливается
обычно в приводах подач. Такая группа
имеет диапазон регулирования, превышающий
допускаемое его значение для простой
множительнойгруппы, и позволяет уменьшить
количество колес в коробке за счет
использования некоторых зубчатых
зацеплений для передачи движения в
двух направлениях.
Группа
со ступенью возврата устанавливается
обычно в приводах подач. Такая группа
имеет диапазон регулирования, превышающий
допускаемое его значение для простой
множительнойгруппы, и позволяет уменьшить
количество колес в коробке за счет
использования некоторых зубчатых
зацеплений для передачи движения в
двух направлениях.
Рассмотрим в качестве примера группу с тремя передачами (рис. 3.16), обеспечивающую четыре различных передаточных отношения:
i1 = (z/z'1)×(z’2/z2)×(z3/z'1); i2 = z1/z'1; i3 = z2/z'2; i4 = z3/z'3
Учитывая, что ряд частот вращения должен быть геометрическим, уравнение настройки для данной группы имеет вид
i1:i2:i3:i4 =1:φx :φ2x:φ3x. (3.67)
Предельные значения передаточных отношений i4 и i2 группы должны удовлетворять условию i4 / i2 ≤ [Rp].
Из уравнения (3.67) i4 / i2 = φ2x. Тогдаx≤ (lg[Rp])/2lgφ.(3.68)
Приняв i2 = 1/φu , получим i3 =φx-u; i4 =φ2x-u; i1 = 1/φx+u(3.69)
При кинематическом расчете группа со ступенью возврата принимается чаще как переборная с характеристикой x и четырьмя передаточными отношениями.
Пример. Определить передаточные отношения передач привода со ступенью возврата по исходным данным: предельные значения частоты вращения ведомого вала – nmin = 25 мин-1; nmax = 1080 мин-1; частота вращения электродвигателя nэ = 1440 мин-1; знаменатель ряд частот вращенияφ = 1,41; максимальное значение диапазона регулирования группы [Rp] = 8.
Диапазон регулирования привода Rn = nmax/nmin = 1080 = 43, 2 ; число
ступеней скорости z = lgRn/lgφ+1= lg43,2/lg1,41+1=11,8. Принимаем z = 12.
Для φ = 1,41 в соответствии с (3.68) характеристика группы со ступенью возврата x=lg[Rp]/2lgφ=lg8/2lgφ=3
Тогда формула структуры данного привода z = 12 = 3(1)⋅4(3). Таким образом, привод содержит две групповые передачи – обычную и со ступенью возврата. передаточные отношения передач привода определяем аналитическим методом. С учетом исходных данных стандартные значения частот вращения составляют следующийгеометрический ряд: 22,4 – 31 – 45 – 63 – 90 – 125 – 180 – 250 – 355 – 500 – 710 – 1000 (мин-1).
Следовательно, минимальное передаточное отношение привода 1 imin=n1/nэ=22,4/1440или выраженное через заданное значение φ: imin=1/φq=1/1,4112,1 т.е. q=12,1 Такое передаточное отношение не может быть обеспечено только двумя групповыми передачами, поэтому привод должен содержать одиночную передачу, например, зубчатую с передаточным отношением i0 (рис. 3.17, а).
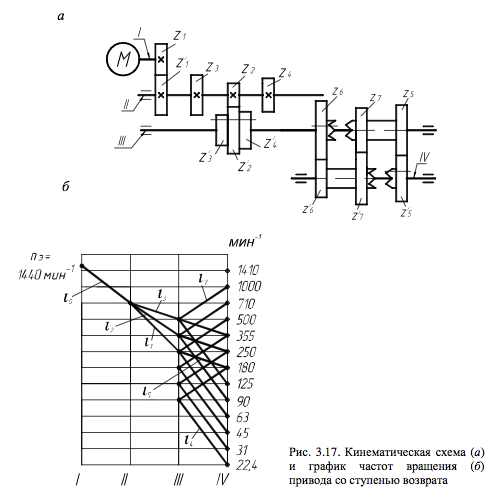
Примем: i4 = z5/z’5 = 1/1,414 = 1/4, u = 4. Тогда, на основании (3.69), для группы со ступенью возврата имеем:
i5 = (z6/z'6)×(z’7/z7)×(z5/z'5)=1/φu+x=1/1,414+3=1/1,417;
i6 = z6/z'6=φu-x=1,414-3-1/1,41;
i7 = z7/z'7=φ2u-x=1,412×4-3-1/1,412=2;
Минимальное передаточное отношение i = z2/z’2восновной группе
примемравным 1/φ к= 1,413.
Тогдаi2=z3/z’3=1/1,412 =1/2; i3=z4/z'4= 1/1,41 .
Передаточное отношение одиночной передачи i0=z1/z'1= 1/φ l
где l=q–к–u–x =12,1–3–7=2,1 т.е. i0 =1/1,412,1
График частот вращения валов данного привода приведен на рис.3.17, б.