

Билет 12
Классификация антенн.
Для образования акустических волн в водной среде и для их приема во всех гидроакустических приборах используются приемные и передающие антенны.
Передающая, или излучающая, антенна преобразует электрическую энергию в механическую. Колебательная система такой антенны создает акустические волны, распространяющиеся в водной среде с определенной скоростью. Приемная антенна принимает отраженные акустические волны и преобразует их механическую энергию в электрическую. Преобразованные и усиленные эхо-сигналы поступают в дальнейшем на индикаторные устройства.
Передающие и приемные антенны обратимы, что позволяет использовать одну антенну как для передачи, так и для приема акустических волн. Такая система называется одновибраторной. В гидроакустической аппаратуре применяются одновибратор-ные системы и системы с двумя антеннами — передающей и приемной.
Антенны в эхолотах, как правило, устанавливаются в прорези днища, таким образом, излучающая поверхность непосредственно соприкасается с окружающей водной средой. Место установки антенн выбирается с учетом наименьшего влияния турбулентных слоев жидкости.
Антенны эхолотов могут устанавливаться и без прорези днища. В этом случае они помещаются в специальных выгородках или танках (рис. 20). Танки заполняются жидкой смесью, главной составной частью которой являются глицерин или касторовое масло. Возникающие в антенне колебания передаются сначала этой жидкости, а затем и обшивке корпуса судна или специальной мембране. На судах большого водоизмещения антенны устанавливаются в нескольких местах корпуса судна и могут выборочно подключаться к работе.
В гидролокаторах и рыбопоисковых эхолотах антенны выдвигаются от корпуса судна на расстояние 1,2—1,3 м, что уменьшает влияние турбулентных потоков жидкости, возникающих от движения корпуса судна особенно на больших скоростях. Антенны устанавливаются в специальных обтекателях, изготовляемых из металла, стеклопластика или резины, и могут разворачиваться как по высоте, так и по азимуту благодаря поворотному устройству.
К основным параметрам акустических волн относятся акустическое давление, энергия акустического поля, интенсивность звука. С изменением степени сжатия частиц среды происходит изменение акустического давления. Это давление изменяется во времени и по мере удаления от источника излучения. Величина акустического давления незначительна, она накладывается на среднее гидростатическое давление. Акустическое давление можно определить как разность давления в какой-либо точке акустического поля и среднего гидростатического давления при отсутствии волн. Единицей измерения акустического давления является паскаль (Па). Уровень звукового давления относительно условно нулевого порога слышимости (2- 10~5 Па) измеряется в децибелах (дБ).
Энергией акустического поля называется сумма кинетической энергии колеблющихся частиц и потенциальной энергии упругой деформации. Энергия измеряется в джоулях (Дж). Мощность акустического поля измеряется в ваттах (Вт). Основной энергетической характеристикой является интенсивность звука /. Интенсивностью звука называется количество энергии, переносимое звуковой волной через площадку в 1 м2, поставленную перпендикулярно направлению распространения звуковой волны за единицу времени. Величина / (в Вт/м2) определяется по формуле
где Р — мощность акустического поля, Вт; /? — расстояние до излучателя, м. При направленном источнике излучения
где 52 — угол направленности.
Скорость звука является основной характеристикой среды, определяющей многие особенности распространения акустических волн. В частности, при изменении скорости распространения происходит, рефракция акустических волн, т. е. их искривление; это обязательно нужно учитывать при работе с рыбопо-исковыми приборами горизонтального действия. Скорость звука в море зависит от давления, температуры и солености, которые могут изменяться в зависимости от глубины, времени года, географического района и времени суток. Аналитические и экспериментальные методы позволяют получить эмпирические формулы расчета скорости звука в зависимости от солености, плот-ности и температуры. Наиболее широкое распространение получили формулы Вуда, Дель-Гроссо и Вильсона. Формула Вуда имеет вид
с= 1450+4,206/—0.0366*8-г-1,137(5—35) + 0,175А,
где г — температура, "С; 5 — соленость, %о; А— глубина, м.
На рис. 2 представлены номограммы для определения скорости звука в зависимости от различных факторов.
1600
1550 -
1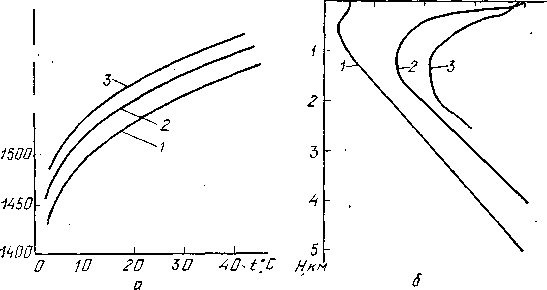 460
1480 1500 1520 1540с м/с
460
1480 1500 1520 1540с м/с
Рис. 2. Зависимость скорости звука:
с — от солености и температуры; /— 5=20 %>; 2— 5=28 %>; 3 — 5—33%»; б — от глубины . океана: / — Тихого; 2 — Атлантического; 3 — Индийского
Приборы контроля трала
Приборы контроля или сетные зонды определяют вертикальное раскрытие трала, глубину хода, степень его заполнения рыбой, что также способствует повышению эффективности промысла. На промысловом флоте используются кабельные и бескабельные сетные зонды. Они устанавливаются на орудиях лова и передают информацию по кабельному или акустическому каналам связи. При добыче глубоководных рыб применяются глубоководные рыбопоисковые комплексы.
Подводная обстановка при ведении промысла постоянно меняется. Косяки рыб перемещаются по вертикали и горизонтали с переменными скоростями. Изменяются концентрация рыбных скоплений, протяженность и условия распространения акустических волн.
Для повышения эффективности промысла разработаны судовые промысловые и навигационно-промысловые комплексы, в которых многие задачи решаются с помощью вычислительных устройств. Для решения навигационных задач и обеспечения безопасности мореплавания используются навигационные эхолоты и гидроакустические лаги (для измерения глубины места и скорости судна). Все гидроакустические приборы подразделяются на следующие группы:рыболокаторы, рыбопоисковые эхолоты и рыбопромысловые комплексы;
приборы контроля за работой орудий лова; навигационные эхолоты и лаги.
3. . ОСНОВНЫЕ ТЕХНИЧЕСКИЕ И ТАКТИЧЕСКИЕ ПАРАМЕТРЫ ГИДРОАКУСТИЧЕСКИХ ПРИБОРОВ
Общие сведения. Промысловые и рыбопоисковые на* учно-исследовательские суда оснащаются гидроакустическими приборами различных типов в зависимости от водоизмещения судна, его назначения и т. д. Выбор того или иного прибора зависит от его параметров, которые делятся на технические и тактические. Знание параметров позволяет грамотно использовать гидроакустические приборы на промысле, а также правильно оценивать и расшифровывать показания регистрирующих приборов с учетом конкретных условий плавания и промысла.
К основным тактическим параметрам относятся: максимальная дальность действия; мертвая зона; разрешающая способность по дальности; разрешающая способность по направлению; точность измерения расстояний и направлений; скорость обзора пространства и др.
К техническим параметрам относятся: излучаемая мощность; частота акустических волн; длительность излучаемых импульсов; ширина характеристики направленности; частота следования импульсов и др.
Максимальная дальность действия гидроакустической аппаратуры. Основным параметром гидролокатора является максимальная дальность (.Отах), которая подразделяется на энергетическую и геометрическую. Апах определяется тем максимальным расстоянием от антенны до обнаруженного объекта, при котором полезный эхо-сигнал может €ыть выделен в регистрирующих приборах на фоне помех (реверберация, шумы моря и т. д.). Изученные свойства акустических волн и среды, где они распространяются, подтверждают их большое влияние на дальность действия приборов. Следует учитывать, что объекты, от которых отражаются акустические волны, могут иметь различные размеры, акустические свойства, структуру и т. д. Зависимость энергетической дальности от технических характеристик аппаратуры и различных факторов ОП' ределяется уравнением гидролокации. В приближенном виде оно записывается так:
УИ—2ПР+ СЦ = УР + ПО,
где УИ — уровень излучения; ПР — потери при распространении; СЦ — интенсивность эхо-сигнала в 1 м от объекта; УР — уровень реверберационной помехи после усиления приемником; ПО — порог обнаружения.
Прогнозируемая дальность действия гидролокатора является приближенной, усредненной величиной. Геометрическая дальность действия гидролокатора определяется формулой
о=1/~2с7оГ (У&Г+У~К») >
где Сс = (с2—^1) (Й2—/г,) —градиент скорости звука.
В
характеризует
влияние на обнаружение объектов
рефракции,
которая ограничивает возможности
аппаратуры независимо
от энергетической дальности (рис. 16).
Рис.
16. Геометрическая дальность
гидролокатора:
Н\
— глубина
погружения антенны;
Ла —глубина косяка ^ Э
— угол наклона антенны
на линии одного акустиче-
~~^Ш^ШЦ^ -^Ц~ ИЦ^~ ского луча, при котором
раздельно
В
эти два объекта будут видны на регистрирующих приборах (рис. 17).
Рис. 17. Разрешающая способность по
дальности:
а — косяки видны слитно; б — косяки видны раздельно; А, Б, В, Г — косяки рыб
Разрешающая способность по дальности зависит главным образом от длины / или длительности т импульса. Теоретически два объекта будут видны раздельно, если расстояние между ними будет больше ст/2, так как в этом случае это-сигнал от 2-го объекта приходит в приемное устройство через некоторый промежуток времени после эхо-сигнала от 1-го объекта. На разрешающую способность также оказывают влияние рельеф дна, расположение рыбы в скоплении, угол направленности, бортовая качка и другие факторы, которые ее
увеличивают, т. е. в реальных условиях разрешающая способность отличается от расчетной; в общем случае она равна (0,7—0,8) ст.
30
При низкой разрешающей способности затрудняется обнаружение придонных рыб. Например, при т=1 мс реальная разрешающая способность составляет 2—3 м, поэтому рыбные скопления возле дна будут записываться слитно с дном, если не применять специальных схем «Отсечка грунта».
Разрешающая способность по направлению. Ею называется тот минимальный угол между двумя объектами, находящимися на одном расстоянии от антенны судна, при котором эти объекты можно различить на регистрирующих приборах раздельно. Разрешающая способность зависит от ширины диаграммы направленности, при этом угловой размер объекта должен быть во много раз меньше ширины характеристики направленности (рис. 18). При а<р объекты сливаются.
Мертвая зона. Мертвой зоной называется минимальная дальность обнаружения объекта. Ее величина зависит от длины импульса' /, которая в свою очередь определяется длительностью импульса т. Мертвая зона находится по формуле гт!п= = ст/2, однако ее величина значительно больше, так как она зависит еще от времени переходных процессов при переходе с излучения на прием, характера сканирования и т. д. и примерно равна Гтш~0,9ст.
Точность определения расстояния и направлений. Точность определения расстоянии в гидролокаторах зависит в основном от инструментальных погрешностей, возможностей регистрирующих устройств и изменений скорости звуковых волн при различных условиях их распространения. Погрешность в измерениях может достигнуть 3—5 % дальности, которая является слишком большой при прицельном разноглу-бинном тралении. Для увеличения точности измерений применяются многоперьевые самописцы с кварцевыми генераторами, регистраторы со специальными стабилизаторами временных разверток и т. д.
В гидролокаторах вертикального действия, навигационных эхолотах погрешности возникают в результате изменения скорости распространения волн, наклона дна, качки и т. д. Погрешность в результате изменения скорости акустических волн определяется формулой 6С = Я (с/с0—1), погрешность из-за наклона дна 6н = /г (зесу—1), где •у — угол наклона дна. Погрешность из-за базы между вибраторами определяется формулой бб = /1—1/г/га+1/4/2, где / — база.
Координаты промысловых объектов определяются по трем величинам: расстоянию, глубине залегания и направлению. Глубина погружения объекта при горизонтальном поиске приближенно определяется по формуле п — О&т$, где р — угол места (см. рис. 18).
Измерение направлений производится с помощью антенн, обладающих направленными свойствами. В рыболокации для
|
![]()
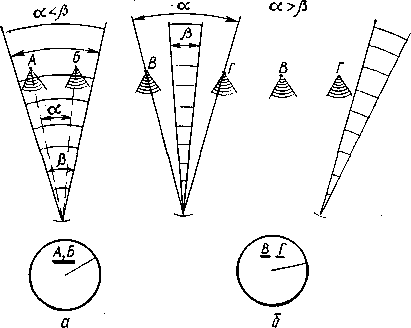
Рис. 18. Разрешающая способность по направлению:
а — косяки видны слитно; б — косяки видны раздельно
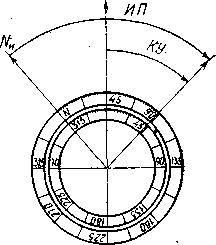
сина-приемника, синхронно связанного с сельсином-датчиком поворотного устройства антенны. По азимутальному кругу снимается КУ, а по шкале репитера — ИП на обнаруженный объект. Особенно удобно определять направления по индикатору с одновременным круговым или крупносекторным обзором.
Скорость обзора подводного пространства. Для успешного промысла необходим оперативный поиск рыбы в окружающем подводном пространстве. Поиск объектов промысла заключается в определении координат этих объектов. Поэтому в реальных условиях скорость обзора подводного пространства— это не только перемещение диаграммы направленности по горизонту с максимально возможной скоростью, но и оценка обнаруженных объектов.
Безусловно важным является возможно более быстрый обзор всего объема воды, что достигается применением электронного сканирования по горизонту.
При применении гидролокатора с одновременным обзором пространства отметки эхо-сигналов от объектов сохраняются определенное время на экране трубки, что позволяет, не изменяя скорости, продолжать поиск, при этом за то же время начительно возрастает объем просматриваемого подводного пространства. Для увеличения скорости обзора подводного пространства применяют дискретный способ, заключающийся в том, что на малой скорости просматривается окружающий объем, после чего судно на максимальной скорости проходит расстояние, равное 1,5Апах (где От&* — дальность действия гидролокатора), затем вновь просматривается горизонт на малой скорости и т. д.
Нос
Излучаемая мощность. Она определяется величиной электрической мощности, подаваемой на излучающую антенну. Величина мощности ограничивается кавитацией, т. е. образованием в прилегающей к антенне жидкости пузырьков, заполненных газом. Кавитация возникает за счет местного понижения давления в жидкости во время полупериода разрежения. В полупериод наибольшего сжатия давление увеличивается и кави-тационный пузырек «захлопывается», излучая при этом ударную волну. Кавитация разрушает поверхность антенн.
Рис. 19. Определение направлений в гидролокаторе «Сарган»
Частота акустических волн. Водная среда оказывает различное действие на акустические волны разных частот. Так, например, при наличии в слоях воды значительного количества пузырьков с воздухом дальность действия гидролокаторов на частотах до 50 кГц
значительно уменьшается, а при увеличении частоты до 150— 200 кГц эти пузырьки практически не оказывают никакого вли-. яния на акустические волны. Однако при высоких частотах волн происходит значительное поглощение энергии. Так, например, коэффициент поглощения на частоте 40 кГц в 15 раз меньше коэффициента поглощения на частоте 400 кГц, поэтому применение той или иной частоты излучения зависит от назначения гидроакустической аппаратуры. Например, в навигационных эхолотах применение частот ограничивается пределами от 15 до 100 кГц. В поисковой аппаратуре, траловых зондах частоты могут быть увеличены до 200 кГц, а в лагах — до 1 мГц и более.
Длительность излучаемых импульсов. Она определяет мертвую зону и разрешающую способность по дальности. Чем больше длительность импульса, тем большее расстояние занимает импульс в пространстве и тем больше должно быть расстояние между объектами, чтобы отраженные от них сигналы не сливались в один общий сигнал, а поступали на вход прибора раздельно. Длительность импульса также влияет на дальность и глубину обнаружения объектов.
Билет 13
1) Термин "отражение" здесь может быть использован только весьма условно. На самом деле переизлучение звука морской поверхностью - процесс значительно более сложный, и в нем большую роль играет рассеяние звука волнами. Наиболее сильно рассеивают звук длинноволновые компоненты, соответствующие максимуму спектра волнения. Как правило, рассеянное поле отбрасывается в основном по направлению зеркального отражения от средней, т.е. горизонтальной, плоскости. В подавляющем большинстве океанических ситуаций рассеяние на поверхности сильнее объемного и, если звук отражается от поверхности, то этот процесс и определяет доминирующую часть рассеянного поля в удаленной точке приема.
При слабом волнении и частотах звука в сотни герц глубина флуктуаций амплитуды сигнала после его "отражения" от поверхности не очень велика (20-30%), а спектр этих флуктуаций довольно точно повторяет спектр волнения вблизи его главного максимума. При усилении волнения (или при увеличении частоты звука до 3-5 кГц) глубина флуктуации амплитуды возрастает и достигает некоторого максимально возможного значения, характерного для случайных процессов; спектр флуктуаций становится значительно шире спектра волнения. На соответствии спектров волн и вызванных волнением флуктуаций амплитуды переизлученного звука базируются различные методы дистанционного измерения характеристик морского волнения. В частности, это спутниковые методы измерения параметров волнения, а следовательно, и породившего его ветра. Только в этом случае вместо акустических волн для зондирования поверхности используются радиоволны.
В результате рассеяние звука неровностями дна, несмотря на их неподвижность, оказывается процессом, подобным рассеянию звука поверхностью. Рассеянный сигнал беспорядочно флуктуирует, и уровень его тем больше, чем более неровным является дно.
Характер переизлученных дном сигналов существенно зависит от строения дна. Наиболее сильное рассеянное поле создается в гористых районах, в частности в зонах срединноокеанических хребтов. Глубина флуктуаций "отраженных" дном сигналов (частоты сотни и выше герц) близка к возможному максимуму (~52%). Из-за сложности рельефа звук рассеивается почти по всем направлениям, а не только вблизи направления зеркального отражения. В результате точки приема достигает лишь небольшая часть рассеянной дном энергии и ослабление звука при "отражении" от дна в зоне хребтов очень велико.
В равнинных районах дна океана отражение звука значительно ближе собственно к отражению. Рассеиваемая энергия сосредоточивается в узком максимуме индикатрисы вокруг зеркального направления, и поэтому уровень отраженных сигналов заметно выше, чем в гористых районах, хотя разница в типе грунта (ил на равнинах и скалы в горах) должна была бы привести к противоположному эффекту. Однако различие рельефа а, следовательно, и особенностей рассеяния оказывается доминирующим.
Спектр флуктуаций переизлученных дном сигналов зависит от скорости движения звукового пятна относительно дна, т.е. от скорости несущего акустические системы судна. При обычных скоростях судов эффективная частота флуктуаций не превышает нескольких герц при частоте сигналов в единицы кГц. Эффективная частота флуктуаций над хребтами выше, чем над глубоководными равнинами.
2) Гидроакустические преобразователи
Гидроакустический преобразователь представляет собой техническое устройство, которое преобразует электрические колебания в механические, или, наоборот, механические колебания в электрические.
Существуют два основных класса гидроакустических преобразователей:
магнитострикционные;
пьезоэлектрические.
Принцип действия магнитострикционных преобразователей
В магнитострикционных преобразователях используется явление магнитострикции. Явление магнитострикции заключается в том, что в некоторых ферромагнитных материалах под воздействием магнитного поля возникает деформация, характеризуемая изменением длины образца при расположении его вдоль магнитных силовых линий. Этот эффект называется прямым магнитострикционным эффектом.
Если при возрастании напряженности магнитного поля длина стержня увеличивается, то магнитострикцию называют положительной, а если длина стержня уменьшается, то магнитострикцию называют отрицательной.
График зависимости относительного удлинения различных ферромагнитных материалов от напряженности магнитного поля приведен на рис. 5.

 Пермаллой
Пермаллой
Кобальт
H
– Никель
Рис. 5. График зависимости относительной деформации от напряженности поля
Характер и степень деформации зависит от материала образца, способа его обработки, величины предварительного намагничивания и температуры. Из материалов, представленных на рис. 5, пермаллой обладает положительной магнитострикцией, никель – отрицательной, а кобальт имеет переменный знак магнитострикции, зависящий от напряженности магнитного поля.
Деформация любого образца ограничивается пределом, который называется магнитострикционным насыщением. Величина деформации насыщения и напряженность магнитного поля, при которой наступает насыщение, зависит от материала. Например, величина магитострикционного насыщения у никеля значительно больше, чем у кобальта, и насыщение никеля наступает при меньшей напряженности поля, чем насыщение кобальта.
Большое влияние на свойства магнитострикционных материалов оказывает термическая обработка. Отжиг любого материала приводит к повышению величины магнитострикции.
С повышением температуры магнитострикционный эффект ослабевает вплоть до полного исчезновения.
С молекулярно-кинетической точки зрения явление магнитострикции объясняется следующим образом:
Кристаллографические оси малых однородных кристаллов ферромагнитного материала имеют беспорядочную ориентацию в пространстве. Однако, отдельные кристаллы объединяются в так называемые домены. Магнитные моменты каждого домена имеют определенную ориентацию. Например, в никеле магнитные моменты доменов ориентируются в восьми направлениях – по четырем диагоналям куба. Эти направления называют направлениями легчайшего намагничивания. Если образец не намагничен, то магнитные моменты доменов ориентированы беспорядочно, и суммарный магнитный момент равен нулю.
Под воздействием внешнего магнитного поля происходит переориентация магнитных доменов. Они ориентируются в тех направлениях, которые совпадают с направлением внешнего поля. При этом происходит деформация кристаллической решетки, что приводит к изменению размеров образца.
Наряду с прямым магнитострикционным эффектом существует и обратный магнитострикционный эффект, сущность которого заключается в изменении магнитного состояния образца под воздействием механического напряжения. При механическом воздействии на ферромагнитный материал кристаллическая решетка деформируется, в результате чего ориентировка магнитных моментов доменов по отношению к внешнему магнитному полю изменяется.
Магнитострикция является четным эффектом. Это означает, что при изменении полярности магнитного поля знак деформации не меняется. Таким образом, если через соленоид, внутри которого находится стержень, пропускать переменный электрический ток, то стержень будет совершать периодические колебания с частотой, равной удвоенной частоте возбуждающего электромагнитного поля. Указанный эффект можно устранить, если применить предварительное подмагничивание преобразователя. В преобразователях поисковых гидроакустических приборов подмагничивание осуществляется путем установки постоянных магнитов или введением специального источника постоянного тока.
Характеристика работы магнитострикционного преобразователя без подмагничивания приведена на рис. 6, а с подмагничиванием – на рис. 7.

ωt
–H +H
ωt
Рис. 6. Характеристика работы
магнитострикционного преобразователя без подмагничивания

ωt
–H +H
ωt
Рис. 7. Характеристика работы
магнитострикционного преобразователя с подмагничиванием
Для повышения эффективности преобразователей частота внешнего возбуждения должна быть равна частоте его собственных колебаний. Частота собственных упругих колебаний стержня зависит от его длины и материала, из которого он изготовлен.
Собственная частота стержня определяется по формуле:
f
=
 ;
;
где n – номер гармоники (обычно n = 1);
l – длина стержня, см;
E – модуль упругости материала, н/м 2 ;
ρ – плотность, кг/м 3 .
Технические характеристики магнитострикционных преобразователей
Магнитострикционные преобразователи широко применяются в гидроакустической рыбопоисковой аппаратуре благодаря их простоте и надежности. Эти преобразователи имеют высокую механическую прочность и не подвергаются коррозии в морской воде. При изготовлении преобразователей легко обеспечивается необходимая изоляция обмоток, т. к. для их работы не требуется применение высоких напряжений.
К недостаткам магнитострикционных преобразователей относятся следующие: