

Билет 11
1.Интерференция, дифракция и рефракция акустических волн
В акустическом поле происходит взаимодействие звуковых волн. Если волны одинаковой частоты приходят в одну точку, то происходит их сложение. Это явление называется интерференцией. Результирующее значение амплитуды суммарной волны будет зависеть от фазы колебаний встретившихся волн. Если фазы этих волн совпадают, то амплитуда увеличивается, если фазы противоположны — уменьшается (рис. 5). В водной среде акустические волны непрерывно изменяют свои амплитуды. Интерференция происходит при отражении волн от различных точек грунта, рыбных скоплений и т. д., а в результате, как будет рассмотрено ниже, в приемных устройствах наблюдается
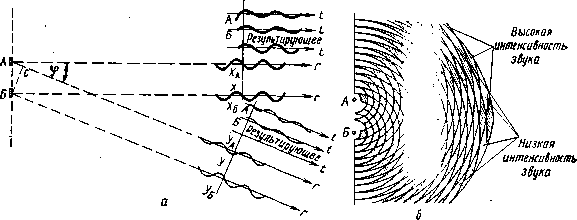
Рис. 5. Интерференция волн:
а — при совпадающих фазах; б — при противоположных фазах
заметный разброс принятых сигналов по амплитуде и по форме. Благодаря интерференции обеспечивается формирование характеристик направленности антенн.
Дифракцией называется способность акустических волн огибать препятствия, встречающиеся на пути распространения этих волн. Препятствиями являются объекты, акустические свойства которых отличаются от свойств водной среды. Дифракция зависит от соизмеримости длины волны и размеров препятствий. Если длина акустической волны больше размеров препятствия, то волны практически полностью огибают это препятствие и отражение от него отсутствует. Если же препятствие во много раз больше длины волны, то в этом случае волны почти полностью отражаются от них и только небольшая их часть огибает эти препятствия. В этом случае образуется зона акустической тени, где звуковые волны отсутствуют. Если размеры препятствий соизмеримы с длиной волны, то происходит частичное отражение и частичная дифракция — область тени уменьшается. Явление дифракции учитывается при проектировании гидроакустических приборов. В рыбопоисковых приборах применяются частоты от
20 до 200 кГц, что позволяет получать отражение даже от единичных рыб.
И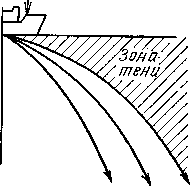 скривление
акустических лучей при их распространении
в
неоднородной среде называется рефракцией.
Толщу
морской воды
можно рассматривать как среду, состоящую
из ряда слоев с
различными акустическими свойствами,
зависящими от разницы
температур, плотности, солености.
Акустические волны проходят эти слои
с различными скоростями, что приводит
к
преломлению волн на границах раздела,
причем степень преломления,
или кривизны, будет тем больше, чем
больше изменение
скорости звука в смежных слоях. Если
скорость звука увеличивается
с глубиной, то такая рефракция называется
положительной, а если равномерно
уменьшается, то она называется
отрицательной.
На рис. 6 приведены лучевые картины,
поясняющие
явление рефракции. В некоторых районах
моря возможно образование акустической
тени (на рис. 6
б, в заштрихована).
В
зону тени акустические лучи не проникают.
Изменения мощности
и направленности излучателя не изменяют
общей картины
отрицательной рефракции. Явление
акустической тени затрудняет
обнаружение объектов или вообще делает
это обнаружение
невозможным.
скривление
акустических лучей при их распространении
в
неоднородной среде называется рефракцией.
Толщу
морской воды
можно рассматривать как среду, состоящую
из ряда слоев с
различными акустическими свойствами,
зависящими от разницы
температур, плотности, солености.
Акустические волны проходят эти слои
с различными скоростями, что приводит
к
преломлению волн на границах раздела,
причем степень преломления,
или кривизны, будет тем больше, чем
больше изменение
скорости звука в смежных слоях. Если
скорость звука увеличивается
с глубиной, то такая рефракция называется
положительной, а если равномерно
уменьшается, то она называется
отрицательной.
На рис. 6 приведены лучевые картины,
поясняющие
явление рефракции. В некоторых районах
моря возможно образование акустической
тени (на рис. 6
б, в заштрихована).
В
зону тени акустические лучи не проникают.
Изменения мощности
и направленности излучателя не изменяют
общей картины
отрицательной рефракции. Явление
акустической тени затрудняет
обнаружение объектов или вообще делает
это обнаружение
невозможным.
При положительной рефракции зоны акустической тени не возникает, что создает благоприятные условия для поиска и обнаружения объектов. При некоторых температурных режимах в слоях воды акустический луч как бы расщепляется, в этом случае также может возникнуть зона тени и обнаружение объектов будет затруднено. При распространении волн могут возникнуть так называемые волновые каналы. Они значительно увеличивают дальность распространения волны, что используется в гидролокаторах горизонтального действия. Волновые каналы могут быть глубинными и подповерхностными (рис. 7). Подповерхностный звуковой канал образуется в том случае, если на некоторой глубине Я находится слой жидкости, в котором скорость звука значительно возрастает. В этом случае акустические лучи имеют значительную рефракцию и направляются к поверхности моря, от которой они отражаются, и, таким образом, акустические волны распространяются как в волно-
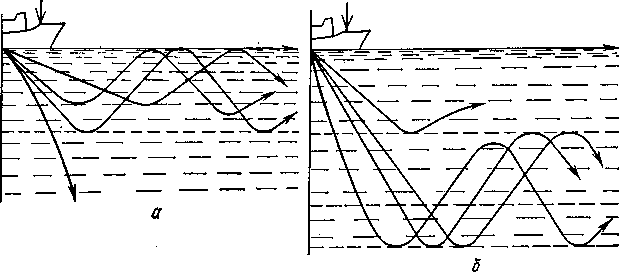
Рис. 7. Волновые каналы:
а — подповерхностный; б—подводный
воде, отражаясь от его стенок. Такова и природа формирования глубинного звукового канала, когда акустическая энергия концентрируется вдоль его оси.
Как будет рассмотрено далее, на промысле применяются гидролокаторы с буксируемыми антеннами. Антенны можно опускать на разную глубину, в том числе выводить их в глубинный канал, что значительно увеличит дальность обнаружения объектов промысла.
В гидролокаторах вертикального действия, навигационных эхолотах погрешности возникают в результате изменения скорости распространения волн, наклона дна, качки и т. д. Погрешность в результате изменения скорости акустических волн определяется формулой 6С = Я (с/с0—1), погрешность из-за наклона дна 6н = /г (зесу—1), где •у — угол наклона дна. Погрешность из-за базы между вибраторами определяется формулой бб = /1—1/г/га+1/4/2, где / — база.
Координаты промысловых объектов определяются по трем величинам: расстоянию, глубине залегания и направлению. Глубина погружения объекта при горизонтальном поиске приближенно определяется по формуле п — О&т$, где р — угол места (см. рис. 18).
Измерение направлений производится с помощью антенн, обладающих направленными свойствами.
2.
Основным параметром гидролокатора является максимальная дальность (.Отах), которая подразделяется на энергетическую и геометрическую. Апах определяется тем максимальным расстоянием от антенны до обнаруженного объекта, при котором полезный эхо-сигнал может €ыть выделен в регистрирующих приборах на фоне помех (реверберация, шумы моря и т. д.). Изученные свойства акустических волн и среды, где они распространяются, подтверждают их большое влияние на дальность действия приборов. Следует учитывать, что объекты, от которых отражаются акустические волны, могут иметь различные размеры, акустические свойства, структуру и т. д. Зависимость энергетической дальности от технических характеристик аппаратуры и различных факторов ОП' ределяется уравнением гидролокации. В приближенном виде оно записывается так:
УИ—2ПР+ СЦ = УР + ПО,
где УИ — уровень излучения; ПР — потери при распространении; СЦ — интенсивность эхо-сигнала в 1 м от объекта; УР — уровень реверберационной помехи после усиления приемником; ПО — порог обнаружения.
Прогнозируемая дальность действия гидролокатора является приближенной, усредненной величиной. Геометрическая дальность действия гидролокатора определяется формулой
о=1/~2с7оГ (У&Г+У~К») >
где Сс = (с2—^1) (Й2—/г,) —градиент скорости звука.
29
В
характеризует
влияние на обнаружение объектов
рефракции,
которая ограничивает возможности
аппаратуры независимо
от энергетической дальности (рис. 16).
Рис.
16. Геометрическая дальность
гидролокатора:
Н\
— глубина
погружения антенны;
Ла —глубина косяка ^ Э
— угол наклона антенны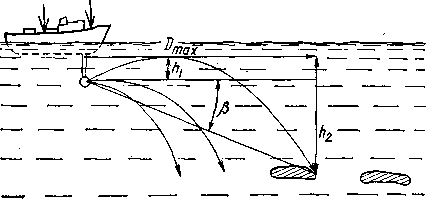
на линии одного акустиче-
~~^Ш^ШЦ^ -^Ц~ ИЦ^~ ского луча, при котором
![]()
раздельно
В
эти два объекта будут видны на регистрирующих приборах (рис. 17).
![]()
![]()

Рис. 17. Разрешающая способность по
дальности:
а — косяки видны слитно; б — косяки видны раздельно; А, Б, В, Г — косяки рыб
Разрешающая способность по дальности зависит главным образом от длины / или длительности т импульса. Теоретически два объекта будут видны раздельно, если расстояние между ними будет больше ст/2, так как в этом случае это-сигнал от 2-го объекта приходит в приемное устройство через некоторый промежуток времени после эхо-сигнала от 1-го объекта. На разрешающую способность также оказывают влияние рельеф дна, расположение рыбы в скоплении, угол направленности, бортовая качка и другие факторы, которые ее
увеличивают, т. е. в реальных условиях разрешающая способность отличается от расчетной; в общем случае она равна (0,7—0,8) ст.
30
3.Принцып_действия_эхолота
При конструировании гидроакустических приборов используются и учитываются основные свойства акустических волн:
распространение в однородной водной среде с постоянной скоростью;
изменение направления и скорости при распространении в неоднородной среде;
отражение от объектов и сред, акустические свойства которых отличаются от свойств той среды, в которой происходит распространение волн;
создание суммарного акустического поля из волн одной частоты;
огибание препятствий, размеры которых меньше длины волны.
С учетом характера водной среды и предъявляемых требований к гидроакустическим приборам в их конструкциях имеются некоторые особенности:
применение акустических волн повышенной частоты;
использование преимущественно импульсного режима работы передающих устройств;
создание направленных и вращающихся диаграмм излучения.
Основные свойства волн — распространение в водной среде «с постоянной скоростью и отражение от разнородных сред — позволяют решать задачи по определению глубины места, обнаружению промысловых объектов промысла, определению их координат. Глубина места, расстояние до объектов промысла определяются по известной формуле О = с1/2, где I — время распространения акустических волн до грунта или до объекта промысла и обратно.
Для измерения глубины под килем судна применяются указатели глубин, самописцы, электронные индикаторы. Современные эхолоты позволяют измерять практически любые глубины.
Для получения достаточной мощности генератора при его
•сравнительно небольших габаритных размерах и потребляемой мощности применяются импульсный режим работы и направленное излучение. При такой работе генератором эхолота формируются кратковременные мощные посылочные импульсы с частотой повторения, зависящей от выбранного диапазона. Импульсный режим работы позволяет накапливать энергию между двумя очередными посылками и применять одну приемо-пере-дающую антенну. Управляет посылками регистрирующий прибор или специальный блок запуска — синхронизатор.
Рассмотрим простейшую схему измерения глубины места эхолотом. Эхолоты применяются не только для измерения глубин, но и для обнаружения косяков рыб под килем судна, определения их вертикальной протяженности, глубины погружения. В качестве регистрирующих приборов в эхолотах применяются самописцы, электронные и цифровые индикаторы, указатели глубины. Самописцы применяются как в рыбопоисковых, так и в навигационных эхолотах. Записывающим устройством в самописцах являются металлическая линейка, подвижное перо или
•система неподвижных перьев, соприкасающихся со специальной электрохимической или электротермической бумагой (рис. 11). В самописце с подвижным пером через систему передач электрическим двигателем (О) приводится во вращение лента, уложенная в направляющих роликах. На ленте укрепляется записывающее перо и кулачковая посылочная группа. В момент нахождения пера самописца против нуля шкалы посылочным кулачком замыкаются контакты К в цепи генератора зондирующих импульсов и происходит излучение акустических волн.
Эхо-сигнал после приема и усиления поступает на перо самописца, и на бумаге производится запись глубины, косяков
рыб. Бумага укладывается в валики и протягивается двигателем с заданной постоянной скоростью. Для расширения диапазона измеряемых глубин в самописцах применяются схемы фа-зирования. При фазировке посылка импульса происходит раньше времени прихода пера на нуль шкалы глубины. Время задержки записи или время запуска посылочного генератора можно плавно или дискретно изменять.

В навигационных эхолотах для записи иногда применяется вращающийся барабан с укрепленной металлической спиралью. Спираль соприкасается с бумагой только в одной точке. В момент нахождения записывающей точки на нуле происходит излучение импульса передающей антенной. Сигнал, отраженный от грунта, поступает на приемную антенну, а после усиления—на спираль, записывающая точка которой перемещается от нуля на некоторое расстояние, зависящее от глубины места.
Рис. 11. Схема измерения глубинш самописцем
В некоторых эхолотах для записи глубины применяются многоперьевые самописцы. Группа неподвижных перьев располагается по всей ширине бумаги, которая протягивается с определенной скоростью лентопротяжным механизмом. Работа такого самописца заключается в следующем. Опорный генератор совместно с делителем формирует остроконечные счетные (тактовые) импульсы, а блок запуска самописца вырабатывает запускающие импульсы. Запускающие импульсы (ЗИ) поступают на генератор зондирующих импульсов в передатчике и на счетчик импульсов, который с этого момента начинает пропускать на дешифратор и далее на схемы совпадений тактовые импульсы (рис. 12). Схемы совпадений связаны с перьями, однако сигнал для записи поступит на то или иное перо только в том случае* если тактовый импульс и эхо-сигнал придут на схему совпадения одновременно. Схем совпадений столько, сколько перьев-(в самописцах их более 200). Первое перо находится против-нуля шкалы глубины, а последнее — против максимального деления этой шкалы. Время поступления эхо-сигнала на схему совпадения зависит от измеряемой глубины.
23:
В гидролокаторах принцип измерения расстояний до объектов промысла остается таким же, однако в них применяются антенны, обеспечивающие посылку акустических волн как в вер-
От Улика упрабления
Опорный генератор
|
*<*
|
Формирователь итульсов
|
|
Счетчик тактовых импульсов
|
|
Дешифратор
|
|
|||||||||
|
|
|
||||||||||||||
На запуск
|
|
'
|
|
|
|
|||||||||||
Блок 'запуска
|
Схе собпа
|
МП Зения
|
_ _ -^
|
Мноеоперьебая линейка самописцй
|
||||||||||||
передатчика
|
|
"»
|
||||||||||||||
Видеосигнал
|
|
|||||||||||||||
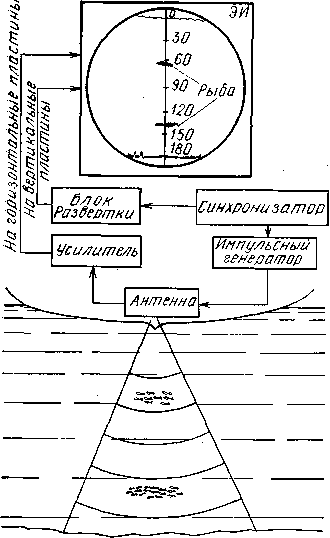
Рис. 12. Принципиальная схема измерения глубины многоперьевым самописцем
Рис. 13. Схема измерения глубины электронным индикатором
тикальном, так и в горизонтальном направлении. В качестве индикаторов применяются самописцы, электронные индикаторы, дисплеи. В электронных индикаторах на электронно-лучевой трубке (ЭЛТ) образуется линейная или радиальная развертка (рис. 13). Принцип измерения расстояний заключается в следующем. Синхронизатор через определенные промежутки времени формирует запускающие импульсы. ЗИ поступают на генератор импульсов, формирующий мощный высокочастотный импульс, и на блок развертки индикатора, обеспечивающий ее образование на экране индикатора. Начало излучения акустических волн и начало движения луча развертки от края трубки вверх (или вниз) совпадают. Луч развертки перемещается по экрану с определенной скоростью, зависящей от выбранного масштаба. Отраженный сигнал после усиления поступает на ЭЛТ, вызывая амплитудную или яркостную отметку цели, напротив которой по шкале снимается величина расстояния. Перемещение диаграммы направ-ленности в гидролокаторе по горизонту и использование радиальной развертки индикатора, вращающейся синхронно с диаграммой, позволяет определять направление на объект промысла.
В некоторых гидролокаторах и навигационных эхолотах применяются цифровые индикаторы расстояний или глубины. В цифровом индикаторе измеряемая величина представляется в виде числа на отсчетном устройстве. Наибольшее распространение получили цифровые индикаторы последовательного счета, в которых аналоговая измеряемая величина преобразуется в пропорциональное число импульсов (число-импульсный код) и затем в другой (обычно двоично-десятичный) код.
При низкой разрешающей способности затрудняется обнаружение придонных рыб. Например, при т=1 мс реальная разрешающая способность составляет 2—3 м, поэтому рыбные скопления возле дна будут записываться слитно с дном, если не применять специальных схем «Отсечка грунта».
Разрешающая способность по направлению. Ею называется тот минимальный угол между двумя объектами, находящимися на одном расстоянии от антенны судна, при котором эти объекты можно различить на регистрирующих приборах раздельно. Разрешающая способность зависит от ширины диаграммы направленности, при этом угловой размер объекта должен быть во много раз меньше ширины характеристики направленности (рис. 18). При а<р объекты сливаются.
Мертвая зона. Мертвой зоной называется минимальная дальность обнаружения объекта. Ее величина зависит от длины импульса' /, которая в свою очередь определяется длительностью импульса т. Мертвая зона находится по формуле гт!п= = ст/2, однако ее величина значительно больше, так как она зависит еще от времени переходных процессов при переходе с излучения на прием, характера сканирования и т. д. и примерно равна Гтш~0,9ст.
Точность определения расстояния и направлений. Точность определения расстоянии в гидролокаторах зависит в основном от инструментальных погрешностей, возможностей регистрирующих устройств и изменений скорости звуковых волн при различных условиях их распространения. Погрешность в измерениях может достигнуть 3—5 % дальности, которая является слишком большой при прицельном разноглу-бинном тралении. Для увеличения точности измерений применяются многоперьевые самописцы с кварцевыми генераторами, регистраторы со специальными стабилизаторами временных разверток и т. д.
В гидролокаторах вертикального действия, навигационных эхолотах погрешности возникают в результате изменения скорости распространения волн, наклона дна, качки и т. д. Погрешность в результате изменения скорости акустических волн определяется формулой 6С = Я (с/с0—1), погрешность из-за наклона дна 6н = /г (зесу—1), где •у — угол наклона дна. Погрешность из-за базы между вибраторами определяется формулой бб = /1—1/г/га+1/4/2, где / — база.
Координаты промысловых объектов определяются по трем величинам: расстоянию, глубине залегания и направлению. Глубина погружения объекта при горизонтальном поиске приближенно определяется по формуле п — О&т$, где р — угол места (см. рис. 18).
Измерение направлений производится с помощью антенн, обладающих направленными свойствами.