

6.7.3. Снабжение инструментами посредством, управляемого от эвм робокара.
При частой смене нарядов на ГПС хорошо зарекомендовала себя целенаправленная смена инструмента посредством рельсовых устройств манипулирования (робокаров) непосредственно в магазине инструментов обрабатывающего центра (рис. 6.21.).
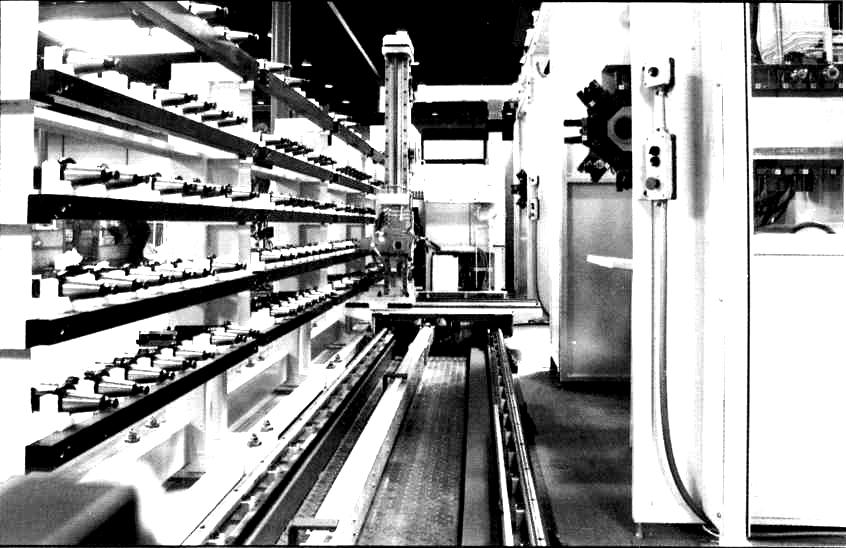
Рис.6.21.Робокар для замены инструментов непосредственно в магазине инструментов обрабатывающего центра
Вдоль рельсовой системы расположены многоярусные стеллажи для инструментов, места которых можно почти безгранично расширять. Обмен инструментами между складом инструментов, магазином станка и станцией ввода-вывода инструментов производится при помощи робота-тележки. А снабжение инструментами внутри системы происходит путём целенаправленного обмена отдельных инструментов при смене наряда или износе или поломке инструмента — во время работы станка.
Управляемая от ЭВМ система снабжения инструментом состоит из стационарных стеллажных накопителей, станции ввода и выдачи (рис. 6.22.), робокара с устройством двойного захвата и прибора предварительной настройки инструмента (рис. 6.23.) с подключением DNC.

Рис. 6.22. Станция ввода и выдачи новых инструментов и вывода изношенных.
Ввод новых инструментов в систему или вывод изношенных или уже не нужных инструментов из системы производится на центральной станции ввода-вывода инструментов. (рис. 6.23)
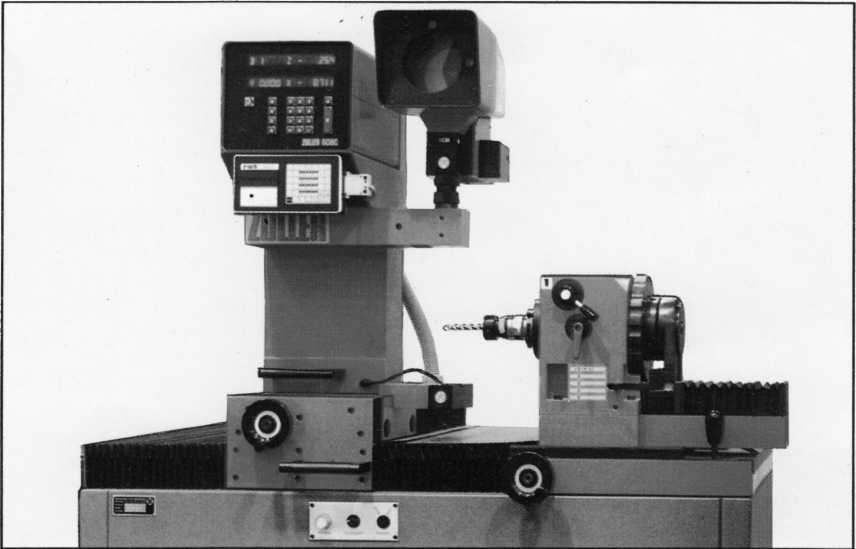
Рис. 6.23. Прибор предварительной настройки инструмента.
Измерение вновь вводимых инструментов производится на устройстве предварительной наладки инструмента и контролируется непосредственно по индикации на экране. (рис. 6.23) Если измеренные значения находятся в поле допуска, данные инструмента передаются по прямой линии в управление подсистемой.
Количество гнезд накопителя можно увеличивать почти безгранично. При первоначальном выборе инструмента на хвостовике инструмента автоматически печатается наклейка со штриховым кодом и открытым текстом в протоколе идентификации во избежание путаницы вне системы и сохраняется в памяти управляющей подсистемой ЭВМ. После замены и замера с помощью прибора предварительной наладки (рис.6.23.) инструмент идентифицируется считывающим чипом на станции ввода/выдачи и откладывается в свободное гнездо накопителя. В управлении ячейкой запоминаются соответствующие установочные параметры, они передаются в режиме «он-лайн» в числовое управление сразу же после того, как произойдет смена инструмента в одном из интегрированных в подсистему станков. Управление робокаром производится через встроенную в его CNC.
Автономная смена инструментов между связанными со станком стационарными цепными накопителями и используемым совместно накопителем инструмента, как правило, производится в основное машинное время. При этом не требуется останов станка и становится возможным постоянный непрерывный производственный процесс, поскольку инструменты «целенаправленно» заменяются перед каждой сменой наряда и в конце срока службы или при поломке инструмента. Такой способ дает следующие значительные преимущества:
1. Повышение степени использования станка за счет автоматической смены инструмента в основное машинное время,
2. Снижение издержек на инструменты за счет полного использования периода стойкости каждого инструмента.
3. Сокращение цеховых запасов за счет производства мелких партий изделий.
4. Снижение времени хранения инструмента на складе за счет снабжения нескольких машин из одного общего накопителя инструментов,
5. Снижение издержек на приспособления за счет синхронной обработки нескольких нарядов.