

10. Привязочные работы в полигонометрии: постановка задачи и пути ее решения.
Привязка полигонометрии к пунктам государственной геодезической сети производится для определения координат пунктов полигонометрического хода и для передачи направления на стороны хода. Привязку полигонометрии к пунктам геодезической сети можно произвести различными способами в зависимости от расположения этих пунктов по отношению к пунктам полигонометрии.
Для привязки хода необходимо иметь координаты начала и конца хода и дирекционные углы исходных начальной и конечной сторон хода. Самым простым способом привязки является непосредственное примыкание полигонометрического хода к пунктам триангуляции или полигонометрии высшего класса. В этом случае привязка осуществляется измерением примычных углов.
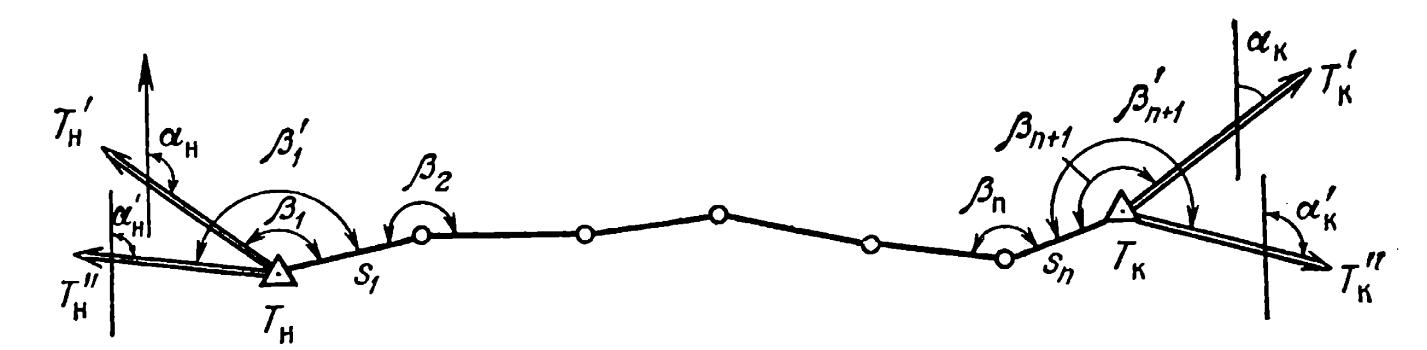
Если известны координаты пунктов ТН и ТК (см. рис.), из которых видны пункты государственной геодезической сети Т’Н, Т’’Н, Т’К, Т’’К, то на пункте ТН необходимо измерить примычные углы β1 и β’1, а на пункте ТК — углы βn+1 и βэn+1. Вычислив по координатам пунктов ТН, ТК, Т’Н, Т’’Н, Т’К, Т’’К дирекционные углы αН, α’Н, αK, α’K сторон Т’НТН, Т’’НТН, ТКТ’К, ТКТ’’К, можно передать дирекционные углы на стороны полигонометрического хода и sn. Этот способ привязки дает надежный контроль, так как разность примычных углов β1 и β’1, βn+1 и β’n+1 должна равняться разности дирекционных углов αН и α’Н, αK и α’K.
В ряде случаев не удается один из концов хода или оба конца привязать к исходным направлениям. Например, когда на исходном пункте отсутствует видимость g земли на соседние пункты, наружные знаки пришли в ветхость, а центры на ориентирных пунктах потеряны. В таких случаях на этом конце хода осуществляют привязку лишь к пункту, а примычный угол между направлением последней линии хода и исходным направлением остается неизмеренным.
Однако в практике геодезических работ бывают случаи, когда непосредственно привязку полигонометрии к пунктам государственного геодезического обоснования осуществить почему-либо невозможно. Тогда применяют особые способы привязки, которые можно разделить на две группы: 1) привязка к близлежащему пункту; 2) привязка к отдаленному пункту.
Используя различные способы привязки, можно получить также координаты ряда боковых пунктов.
11. Передача координат с вершины знака на землю. Постановка задачи. Чертеж.
11+12+13. Передача координат с вершины знака на землю. Вычисление координат и контроль решения задачи + Оценка точности.
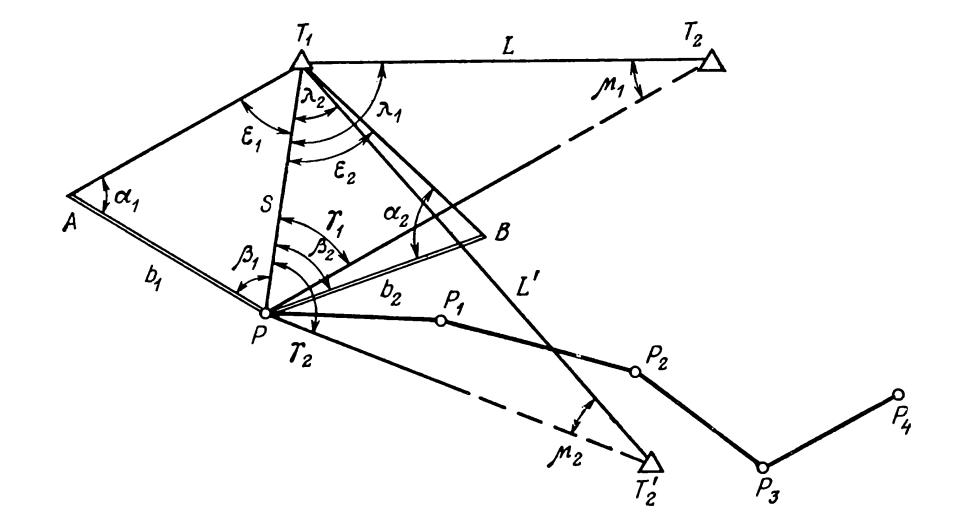 рис.1
рис.1
Пункт, к которому производится привязка, недоступен ни для линейных, ни для угловых измерений (обычно это шпиль какого-либо здания).
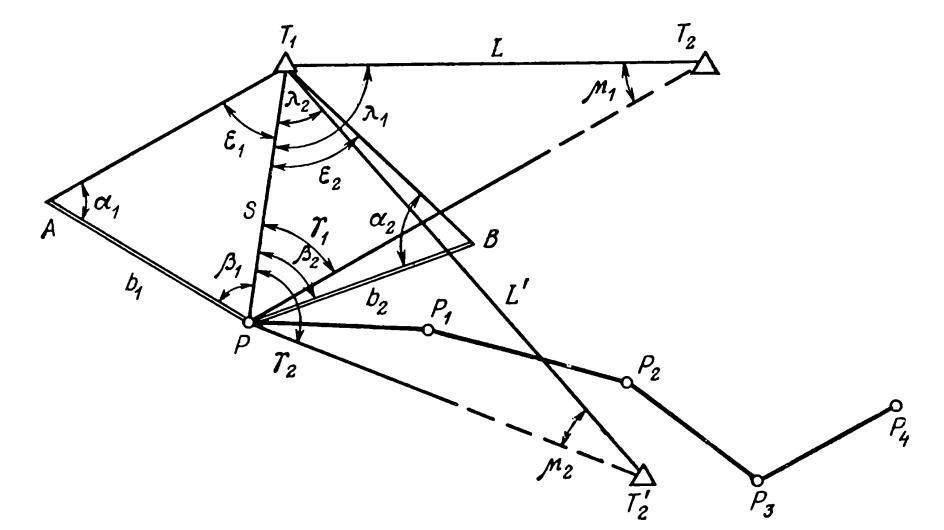
Необходимо определить координаты пункта Р (см. рис.1), из которого видны пункты обоснования: близко расположенный пункт Т1 и пункт Т2, последний может быть расположен вдалеке от пункта Р. Более надежный контроль решения задачи будет обеспечен в том случае, если, кроме пункта Т2 будет виден еще пункт Т’2.
Расстояние РТ1=s можно определить как неприступное. Для этого на местности строят два треугольника АРТ1 и ВРТ1. Стороны этих треугольников АР (b1) и ВР (b2) измеряют непосредственно; кроме этого, в каждом треугольнике измеряют по два угла α1, β1, α2, и β2.
Из треугольников
АРТ1
и ВРТ1
определяют
длину РТ1=s
по формуле
![]() (XV.1),
где
(XV.1),
где
![]() (XV.2),
а i=
1, 2. Из полученных значений берут среднее.
(XV.2),
а i=
1, 2. Из полученных значений берут среднее.
Для определения примычного угла λ1 на местности при точке Р измеряют угол γ1. Этот угол дает возможность определить сначала из треугольника РТ1Т2 угол μ1, а затем и угол λ1. В треугольнике РТ1Т2 дирекционный угол линии (Т1Т2)* и ее длину Т1Т2= L находят из решения обратной геодезической задачи по формулам:

Надежнее контроль обратной геодезической задачи выполнить по формуле:
![]() так
как, вычисляя tg (Т1Т2)
по формуле (XV.3), можно допустить
так
как, вычисляя tg (Т1Т2)
по формуле (XV.3), можно допустить
ошибку в разности ординат (у2 — у1) или абсцисс (х2 — х1), и эта ошибка при контроле по формулам (XV.4) останется незамеченной, хотя Т1Т2 и вычисляют дважды.
Зная величину L, из треугольника РТ1Т2 находят sin μ1= s/L * sin γ1 (XV.6), а затем по таблицам — угол μ1.
Примычный угол λ1
получают из
того же треугольника как дополнение до
180°:
![]() (XV.7)
(XV.7)
Дирекционный угол
φ направления Т1Р
определяют
как
![]() (XV.8)
(XV.8)
Выбор знака перед λ1 в формуле (XV.8) производится с учетом расположения пунктов на схематическом чертеже, составление которого при решении задачи необходимо.
По полученным длине линии РТ1 и дирекционному углу ее (Т1Р) находят приращение координат, а затем координаты соответственно по формулам:
![]() (XV.9)
и
(XV.9)
и
![]() (XV.10).
(XV.10).
Заключительный
контроль решения задачи состоит в
вычислении дирекционного угла (РТ2)
![]() (XV.11)
и вторичном получении угла
(XV.11)
и вторичном получении угла
![]() (XV.12)
(XV.12)
Если из пункта Р будет виден пункт Т’2, его необходимо использовать для вторичного получения значения координат пункта Р, для чего следует на пункте Р измерить угол γ2, а далее повторить решение задачи, начиная с получения tg (Т1Т’2) и L’ по формулам (XV.3) и (XV.4) и т.д. до конца.
Оценка точности при решении задачи состоит в получении средних квадратических ошибок вычисленных элементов: линии РТ1=s дирекционного угла (Т1Р)=φ и положения пункта Р.
Для проведения оценки точности необходимо иметь показатели точности измерения базисов (mb — при измерении светодальномером, μ и λ — при измерении инварной проволокой) и углов (mα, mβ, mγ).
Для получения msi
возьмем
функцию (XV.1), прологарифмируем ее, а
затем дифференцированием найдем
 (XV.13),
при этом учтем, что угол ε определяется
по формуле (XV.2), следовательно,
(XV.13),
при этом учтем, что угол ε определяется
по формуле (XV.2), следовательно,
![]()
Переходя от (XV.13) к
средним квадратическим ошибкам и
принимая mαi
=
mβi
(углы измерены
равноточно), найдем
![]() (XV.14)
(XV.14)
Средняя квадратическая
ошибка среднего значения линии scp
будет
![]() (XV.15)
(XV.15)
Величинами msi
можно
воспользоваться для подсчета предельного
расхождения в значениях si,
вычисленных
из двух треугольников, так как
Тогда
![]() (XV.16)
(XV.16)
Определим среднюю квадратическую ошибку дирекционного
угла φ1.
Дифференцируя формулы (XV.8), получим
![]() (XV.17),
где i
= 1, 2.
(XV.17),
где i
= 1, 2.
Угол λi
вычисляется по формуле (XV.7), следовательно,
дифференцирование ее дает![]() (XV.18).
(XV.18).
В свою очередь величина μi, определяется выражением (XV.6). Несколько упростим его, имея в виду, что отношение s/L, как правило, равно 1/10. С учетом этого формулу (XV.6) можно написать sin μi = 1/10 sin γi.
Дифференцируя ее,
получим
![]() откуда
откуда
![]() .
.
Можно считать, что отношение
cos γi/cos μi < 1.
Тогда
dμi ~ 1/10dγi.
Учитывая это соотношение, можно в формуле (XV. 18) dμi при оценке точности в расчет не принимать и принять
dλi ~ dγi, или с учетом (XV. 17) dφi ~ dγi.
Отсюда, переходя к средним квадратическим ошибкам, будем иметь mφi ~ mγi (XV.19).
Нетрудно установить, что строгая формула средней квадратической ошибки дирекционного угла будет иметь вид m2φi = (1 + tg μi*ctg γi)2 m2γi + ρ2 tg2 μi (msi/si)2 (XV.20)/
Средняя квадратическая ошибка среднего значения дирекционного угла φср в случае определения его по двум пунктам T2 и Т’2 (c учетом (XV. 19)) будет равна M2φ=1/2 √2m2γ = 0,71mγ (XV.21), где mγ = mγ1 = mγ2.
Предельное расхождение между значениями ф, полученными по двум пунктам, определится выражением пред(φ1 — φ2) = 2√2m2γ = 2,8mγ . (XV.22)
Для получения средней квадратической ошибки положения пункта Р воспользуемся рис. 2. Допустим, что под влиянием ошибок в длине линии ds и в дирекционном угле dφ пункт Р сместился со своего верного положения на величину dp. Это смещение можно разложить на компоненты ds и u, где u=s*dφ/ρ, тогда dP2 = ds2 + u2 или dP2 = ds2 + s*dφ/ρ (XV.23).
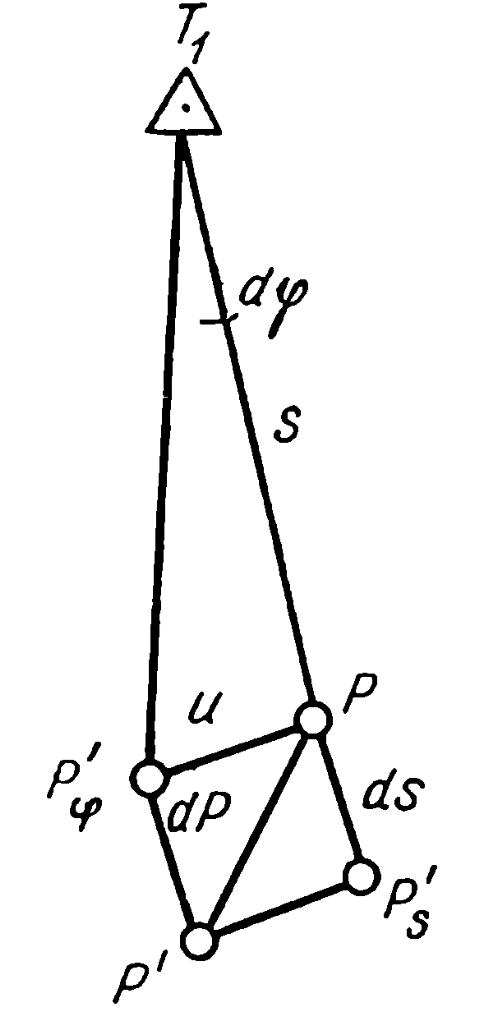 Рис.2
Рис.2
Предположим, что определение пункта повторено достаточно большое число раз и что имеется n равенств вида (XV.23). Сложив эти равенства и разделив затем обе части суммарного равенства на число n получим:
![]() (XV.24), где Мφ
и Ms
— средние
квадратические ошибки φср
и scp.
(XV.24), где Мφ
и Ms
— средние
квадратические ошибки φср
и scp.
Анализ формул показывает, что для обеспечения большей точности передачи координат с пункта Т1 на пункт Р необходимо:
а) строить по возможности равносторонние вспомогательные треугольники APT1 и ВРТ1 это обеспечит большую точность вычисления s;
б) выбирать положение пункта Р так, чтобы угол γ был близок к прямому (Т1Р примерно перпендикулярно к РТ2), тогда угол μ будет получен с большей точностью.
2. Пункт, к которому производится привязка, доступен для угловых, но не доступен для линейных измерений. Таким пунктом может быть, например, геодезический знак, построенный на крыше какого-либо дома, что часто
имеет место в городах.
В этом случае величина угла λ измеряется и задача сводится к вычислению неприступного расстояния Т1Р =s, которое определяется из решения двух треугольников APT1 и ВРТ1. Углы ε1 и ε2 в этих треугольниках измеряются непосредственно.