

Глава 2. Расчет уравновешенности
В расчетной части работы проведём сравнение двухцилиндрового однорядного двигателя с кривошипами направленными под углом 3600 и двухцилиндрового однорядного двигателя с кривошипами под углом 1800, определим наилучшую уравновешенность, выявим преимущества и недостатки каждой схемы.
Схема с кривошипами направленными в одну сторону может применяться только в четырёхтактных двигателях, так как только для этих двигателей обеспечивается равномерное чередование вспышек через 3600 угла поворота коленчатого вала.
Схема с расположением цилиндров под углом 1800 применяется как для двухтактных, так и для четырехтактных. В двухтактных двигателях при такой схеме обеспечивается равномерное чередование вспышек через каждые 1800 поворота коленчатого вала.
2.1. Расчет уравновешенности двигателя с кривошипами направленными под углом 3600
|
Рисунок 9. - Схема коленчатого вала двухцилиндрового двигателя с кривошипами под углом 3600. |
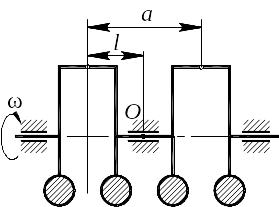
В соответствии с обобщенной схемой (рис. 1) получаем следующие параметры:

Принимаем: a = 89 мм; r = 35,5 мм = 0,00355 м; λ = 0,29;
mr
= 3,7 кг; ω =
596,9
 ;
mп = 1,285 кг;
;
mп = 1,285 кг;
Находим значения косинусного и синусного коэффициентов

Вертикальная и горизонтальная составляющие центробежной силы инерции
Pcв = 2mrrω2cosφ = 2∙3,7∙0,00355∙596,92∙1 = 9,3 кН
Pcr = 2mrrω2sinφ = 2∙3,7∙0,00355∙596,92∙0 = 0
а их результирующая
Pc = Pcв + Pcr = 9,3 + 0 = 9,3 кН
и действует по радиусу кривошипа.
Очевидно, что
момент центробежных сил инерции
вращающихся масс

Силы инерции возвратно-поступательно движущихся масс и моменты от них определяются выражениями:
Pj1в = 2mпrω2cosφ = 2∙1,285∙0,00355∙596,92 ∙1 =3,25 кН ;
Pj1r = 0;
ΣPj1 = Pj1в + Pj1r = 3,25 + 0 = 3,25 кН.
Pj2в = 2mпrω2λcos2φ = 2∙1,285∙0,00355∙596,92 ∙ 0,29∙1 = 0,94 кН ;
Pj2r = 0 ;
ΣPj2 = Pj2в + Pj2r = 0,94 + 0 = 0,94 кН.
Mj1 = 0.
Mj2 = 0.
Уравновешенность механизма может быть оценена непосредственным суммированием сил, так как они расположены в одной плоскости и одинаковы по величине.
2.2. Расчет уравновешенности двигателя с кривошипами под углом 180°

Рисунок 10. - Схема коленчатого
вала двухцилиндрового двигателя
с кривошипами под углом 1800.
Учитывая,
что

Принимаем: a = 89 мм; r = 35,5 мм = 0,00355 м; λ = 0,29;
mr = 3,7 кг; ω = 596,9 ; mп = 1,285 кг; l = 44,5 мм.
 ;
p1 =
0,01 м; b = 0,16 мм;
;
p1 =
0,01 м; b = 0,16 мм;
 = 0,033 кг; p2
= 0,01 мм.
= 0,033 кг; p2
= 0,01 мм.
Pcв = mrrω2(acв cosφ+ bcв sinφ) = 3,7∙0,00355∙596,92 ∙(0+ 0) = 0; (2.1)
Pcr = mrrω2(acr cosφ+ bcr sinφ) = 3,7∙0,00355∙596,92 ∙(0+ 0) = 0. (2.2)
где
acв = Σ cos(φ1i + ε1) = cos(φ11 + ε1) + cos(φ12 + ε1) = cos(0 + 0) + cos(180 + 0) =0 ;
bcв = - Σ sin(φ1i + ε1) = - (sin(φ11 + ε1) + sin(φ12 + ε1)) = - (sin(0 + 0) + sin(180 + 0)) = 0 ;
acr = Σ sin(φ1i + ε1) = sin(φ11 + ε1) + sin(φ12 + ε1) = sin(0 + 0) + sin(180 + 0) = 0
bcв = Σ cos(φ1i + ε1) = cos(φ11 + ε1) + cos(φ12 + ε1) = cos(0 + 0) + cos(180 + 0) =0.
Равнодействующая вертикальной и горизонтальной составляющих
Pc
=
 (2.3)
(2.3)
или
Pc =
mrrω2

Моменты сил инерции вращающихся масс. Составляющие момента сил инерции вращающихся масс, относящихся к i-му цилиндру и действующие в вертикальной и горизонтальной плоскостях можно определить из выражений
 (2.4)
(2.4)
 (2.5)
(2.5)
Формулы для определения результирующих вертикальной и горизонтальной составляющих момента получены на основе выражений (2.6) и (2.7):
Mcв
= mrrω2Σ(l-y1i)cos(φ+φ1i+
ε1) = mrrω2((l-y11)cos(φ+
φ11+ ε1)+
(l-y12)cos(φ+
φ12+ ε1))
=
 ((0,00445- 0)cos(0+ 0+ 0)+ (0,00445-
0,0089)cos(0+ 180 + 0)) = 41,6 Нм;
((0,00445- 0)cos(0+ 0+ 0)+ (0,00445-
0,0089)cos(0+ 180 + 0)) = 41,6 Нм;
Mcr = mrrω2Σ(l-y1i)sin(φ+φ1i+ ε1) = = mrrω2((l-y11)sin(φ+ φ11+ ε1)+ (l-y12)sin(φ+ φ12+ ε1)) = ((0,00445- 0)sin(0+ 0+ 0)+ (0,00445- 0,0089)sin(0+ 180 + 0)) = 0.
В результате преобразований, аналогичных выполненным ранее, имеем
 (2.6)
(2.6)
 (2.7)
(2.7)
где
Aсв = Σ (l-y1i)cos(φ1i+ε1) =( l-y11)cos(φ11+ε1)+ (l-y12)cos(φ12+ε1) =
( 0,00445-0)cos(0+0)+ (0,00445-0,0089)cos(180+0) = 0,0089 мм ;
Aсr = Σ (l-y1i)sin(φ1i+ε1) =( l-y11)sin(φ11+ε1)+ (l-y12)sin(φ12+ε1) =
( 0,00445-0)sin(0+0)+ (0,00445-0,0089)sin(180+0) = 0;
Bсв = -Σ (l-y1i)sin(φ1i+ε1);
Bсr = Σ (l-y1i)cos(φ1i+ε1).
или


тогда Bсв = 0;
Bсr = 0,0089.
Векторная равнодействующая моментов
Mc
=
 =
=
 = 41,6 Нм (2.8)
= 41,6 Нм (2.8)
Угол
 между векторной равнодействующей
моментов и вертикальной осью определяем,
исходя из соотношения
между векторной равнодействующей
моментов и вертикальной осью определяем,
исходя из соотношения

 =
1
=
1
Подставив выражения (2.7) в эту формулу, получаем

|
Рисунок 11. - Определение угла между векторной равнодействующей моментов и вертикальной осью |
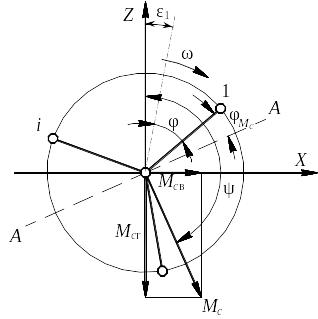
С другой стороны, исходя из схемы, приведенной на рис. 1, имеем

Разложим синус суммы углов
 и
и
 :
:
 (2.9)
(2.9)
Приравняв в (2.8) и (2.9) значения
перед
 и
и
 ,
имеем
,
имеем

и

откуда

Как видно на схеме,
 - угол между плоскостью действия момента
AA и плоскостью первого
кривошипа. Зная этот угол, можно правильно
расположить противовесы, уравновешивающие
момент центробежных сил инерции.
- угол между плоскостью действия момента
AA и плоскостью первого
кривошипа. Зная этот угол, можно правильно
расположить противовесы, уравновешивающие
момент центробежных сил инерции.