

Определение тормозного момента. Выбор тормоза.
![]()
![]()
m – число ветвей
![]()
![]() -
кратность полиспаста.
-
кратность полиспаста.
Место установки тормозов:
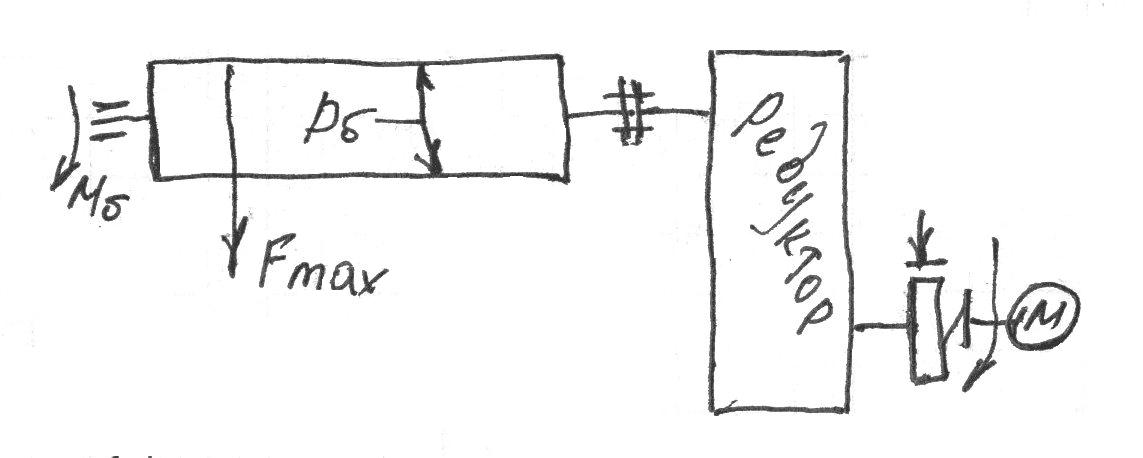
Для понижения тормозного момента, а, следовательно, размеров и массы тормоза, его располагают на быстроходном валу привода со стороны редуктора (для большей надежности).
КПД
полиспаста (![]() )
находится в числителе, т.к. потери в
механизме понижают работу тормоза,
необходимую для остановки механизма.
)
находится в числителе, т.к. потери в
механизме понижают работу тормоза,
необходимую для остановки механизма.
Приведем момент на барабане к моменту двигателя:
![]()
Тормозной
момент:
![]()
К- коэффициент запаса (1,2…2,5)
11. Механизм подъема. Назначение, структурная кинематическая схема, состав, принцип работы. Определение мощности механизма подъема.

Принцип действия: включается электродвигатель (1), через муфту (2) и тормоз (3) передается вращательное движение на двухступенчатый цилиндрический редуктор (4). Редуктор (4) через жесткую муфту передает вращательное движение барабану (5). на барабане (5) намотано две ветви каната, которые через полиспасты приводят в движение грузозахватное устройство.
Механизм подъема предназначен для вертикального подъема груза.
Классификация механизмов подъема:
с жесткой кинематической схемой привода;
с фрикционным приводом;
- по типу привода:
1) электрический;
2) гидравлический.
- по типу передач:
1) цилиндрические;
2) планитарные;
3) выхревые редукторы.
Червячные на исп., т.к. у них низкий КПД (потеря мощности).
![]() ;
; ![]()
ПВэл - продолжительность включения, %
![]() (из
циклограммы работы механизма)
(из
циклограммы работы механизма)
Если время ПВц >чем ПВЭл. по каталогу, то мощность пересчитывают.
![]()
![]() -
передаточное число редуктора
-
передаточное число редуктора
![]()
12. Механизм подъема с электромагнитом. Назначение, структурная к5инематическая схема, состав. Кинематический расчет привода кабельного барабана.
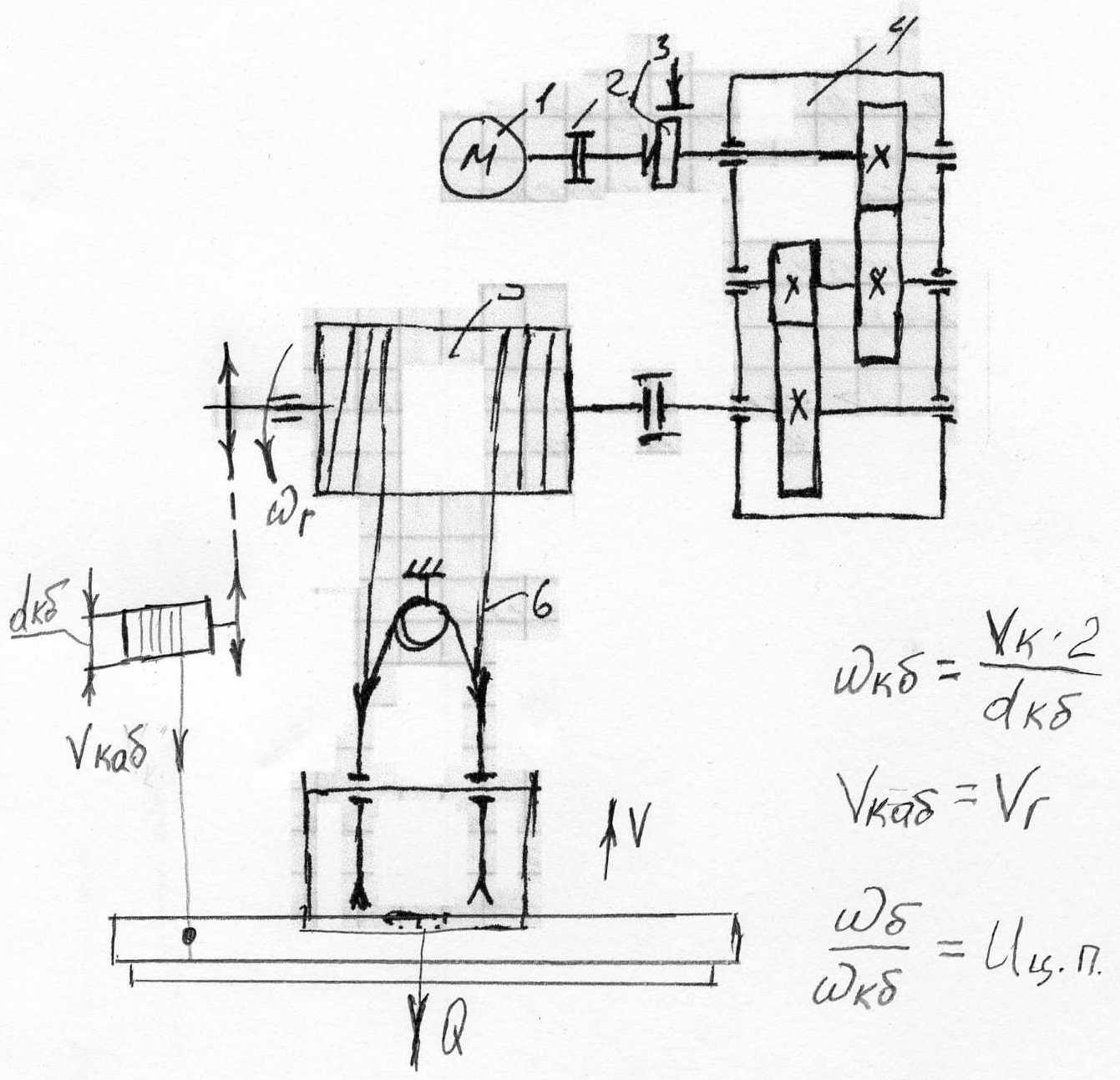
Q – грузоподъемность крана.
VГ – скорость подъема груза.
1-электродвигатель;
2-муфта;
3-тормоз;
4-редуктор;
5-барабан;
6-полиспаст.
Принцип действия: включается электродвигатель (1), через муфту (2) и тормоз (3) передается вращательное движение на двухступенчатый цилиндрический редуктор (4). Редуктор (4) через жесткую муфту передает вращательное движение барабану (5). На барабане (5) намотано две ветви каната, которые через полиспасты приводят в движение грузозахватное устройство. В данном случае грузозахватное устройство представляет собой электромагнит.
Исп. для подъема стальных и чугунных материалов. Выпускают двух видов: круглый - М(для мелкоштучных материалов); прямоугольный – П (для груза большой длины). Электромагниты полностью автоматизируют процесс захвата, транспортировки и освобождения.
Недостаток: работа его в значительной степени зависит от формы груза., магнитных свойств и температуры. Например: М42 1670 мм способен поднять балку 16тонн и 200кг стружки. При температуре >2000 снижается электромагнитная сила.
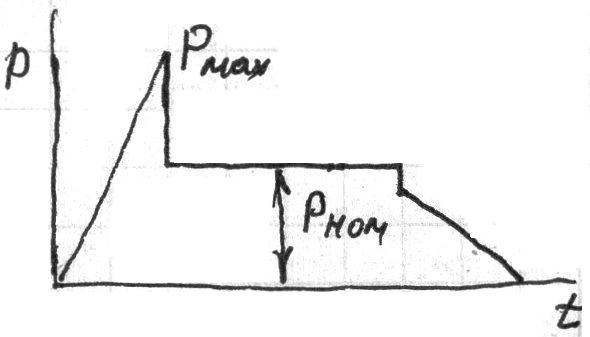
13. Динамика механизма подъема. Диаграммы скорости, ускорения, мощности. Состав полного пускового момента.
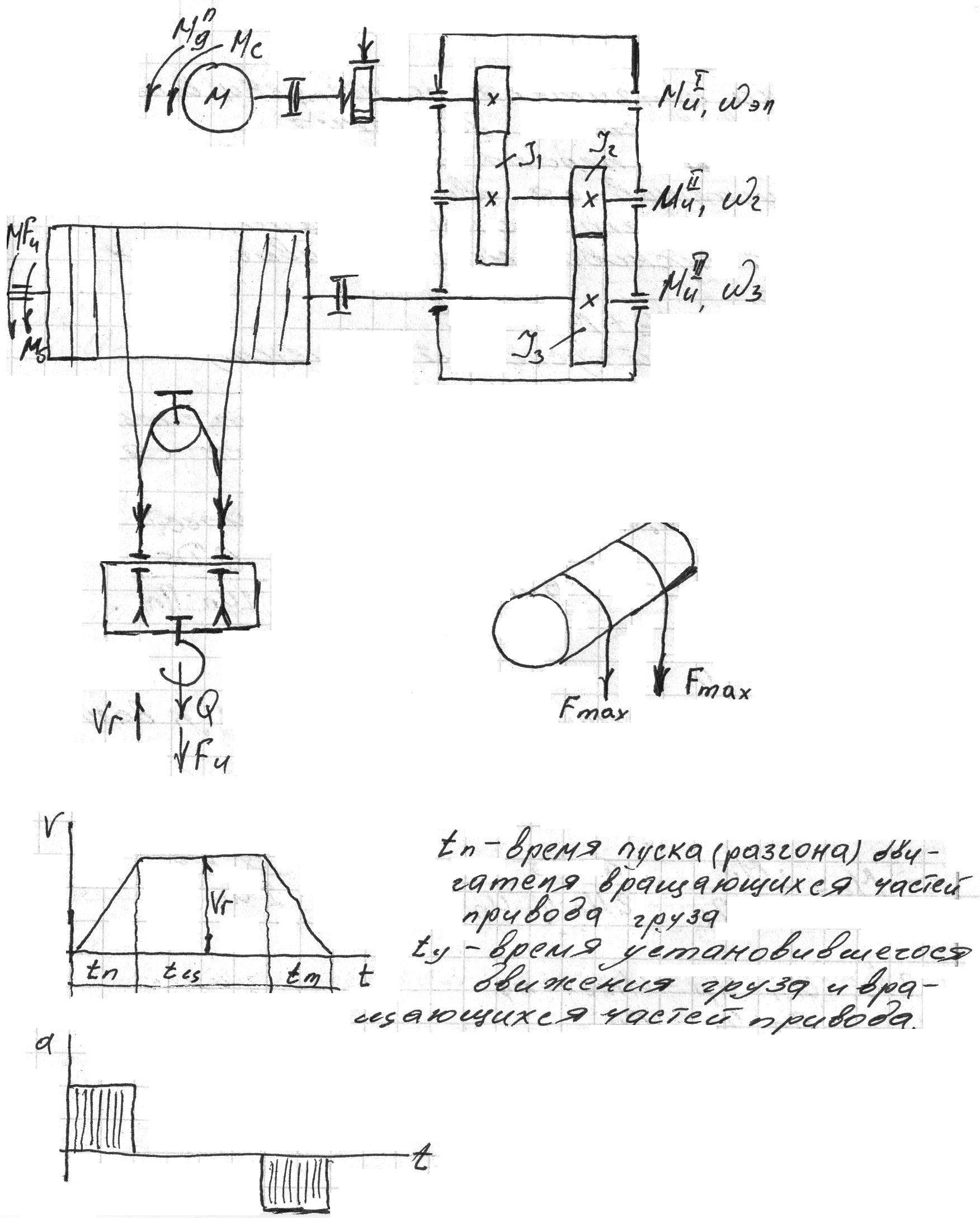
Проверка двигателя по нагрузке в период неустановившегося движения.
В начальный период движения Рmax больше, чем Р установившегося движения, т.к. преодолеть силы инерции.
Полный пусковой момент двигателя состоит:
![]()
Где: Мn – полный пусковой момент
Мс – статичный момент;
![]() - момент динамический от силы инерции
поступательно движущихся масс;
- момент динамический от силы инерции
поступательно движущихся масс;
![]() - полный момент инерции от вращающихся
масс.
- полный момент инерции от вращающихся
масс.
![]()