

2.3 Методические указания
В некоторых случаях возникает необходимость преобразования структурных схем для получения эквивалентной (расчетной) передаточной функции исследуемой системы. Такая ситуация возникает в том случае, если исходная структурная схема является многоконтурной. Причем многоконтурная система без перекрестных связей преобразуется к одноконтурной довольно просто - достаточно использовать правила преобразования последовательного соединения звеньев САУ, параллельного соединения звеньев САУ и присутствия обратной связи.
Для преобразования многоконтурной САУ с перекрещивающимися связями к одноконтурной, кроме упомянутых выше правил, необходимо использовать правила переноса звена через узел, звено, элемент сравнения через звено и обратно.
Пусть замкнутая система управления задана структурной схемой (рис.3):
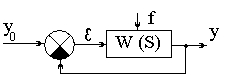
Рис. 3.
Замкнутая САУ может быть .описана несколькими передаточными функциями: Ф(S)=Y(S) - передаточная функция по управляющему воздействию (главная передаточная функция);
Фε(S)= Е(S)/Y0(S) -передаточная функция по ошибке;
Фf(S)=Y(S)/F(S) - передаточная функция по возмущению;
Фε f(S)= Е(S)/ F(S) - передаточная - функция для ошибки возмущения.
Оригиналы и изображения связаны следующим образом:
y0(t)÷Y0(S); ε(t) ÷Е(S); f(t) ÷ F(S); y(t) ÷Y(S).
Имея в виду, что W(S) = В(S)/А(S), можно указать на следующий связи передаточных функций замкнутой САУ с передаточной функцией ее разомкнутой части:
Ф(S)=![]() =
=![]() ,
(2.1)
,
(2.1)
Фε (S) = 1- Ф(S) = = , (2.2)
Фf(S)
=
![]() =
=
![]() ,
(2.3)
,
(2.3)
где Wf(S) - передаточная функция части разомкнутой системы, к которой приложено возмущение f(t); R(S)= A(S) · Wf(S) полином степени не выше, чем ступень полинома A(S).
Фε f(S)= Фf(S), (2.4)
Нетрудно заметить, что знаменатели всех передаточных функций идентичны. Это дает возможность высказать важный вывод: характеристическое уравнение замкнутой САУ может быть записано по любой из имеющихся передаточных функций системы.
Для получения требуемых частотных функций следует использовать передаточную функцию W(S). При этом после замены S=jw получается комплексная передаточная функция W(jw), который следует представить в виде вещественной и мнимой слагаемых:
W(jw)=P(w)+jQ(w). (2.5)
Теперь КЧХ можно построить в координатах P и Q. Амплитудная частотная и фазочастотная функции получаются из условий:
A(w)=![]() ,
φ(w)=arctg
,
φ(w)=arctg![]() .
(2.6)
.
(2.6)
Для получения выражений и построения частотных характеристик можно использовать и другой подход, учитывающий свойства последовательного соединения звеньев.
Передаточные функции (I)-(4) получены в предположении, что главная обратная связь единичная. Если это не так, то соотношения (I)-(4) необходимо соответствующим образом скорректировать. Пусть разомкнутая часть САУ имеет передаточную функцию W(S)=B(S)/A(S). Тогда характеристический полином замкнутой САУ, на основании записей (I)-(4) имеет вид:
Д(S)=A(S)+B(S). (2.7)
СПИСОК ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ:
Бесекерский В.А., Попов Е.П. Теория систем автоматического регулирования. - Изд. 4 -е, перераб. и доп. – СПб., Профессия, 2007. – 752 с. – (Серия: Специалист).
Бесекерский В.А., Герасимов А.Н., Лучко С.ВА., Небывалов А.В., Порфирьев Л.Ф., Фабрикант Е.А., Федоров С.М., Цветков В.И. Сборник задач по теории автоматического регулирования и управления: изд. пятое, перераб. – Наука, гл. ред. физ-мат. лит., 1978. – 512 с.
Теория автоматического управления: ч. I: Теория линейных систем автоматического управления: Учебное пособие для вузов/ Под. Ред. Воронова А.А. – М.: Высшая школа, 1977. – 303 с.: ил.
Теория автоматического управления: ч.II: Теория нелинейных систем автоматического управления: Учебное пособие для вузов/ Под ред. Воронина А.А. – М.: Высшая школа, 1977. – 288 с.: ил.