

1.3. Частотные критерии устойчивости
П р и н ц и п а р г у м е н т а. В основе частотных критериев устойчивости лежит известный в теории функций комплексного переменного принцип аргумента.
Пусть дано алгебраическое уравнение с действительными коэффициентами:
|
1.25 |
Многочлен А(р) можно представить в виде:
|
1.26 |
где pi — корни уравнения А(р) = 0.
Положим
![]() ,
тогда:
,
тогда:
|
1.27 |
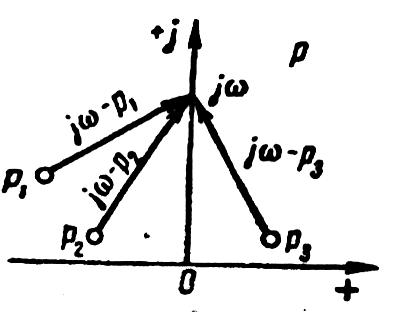
Рассмотрим
геометрическое представление
комплексного числа
![]() на
комплексной плоскости р.
Начало
вектора, изображающего это комплексное
число, лежит в точке
pi,
а
конец — на мнимой оси в точке
на
комплексной плоскости р.
Начало
вектора, изображающего это комплексное
число, лежит в точке
pi,
а
конец — на мнимой оси в точке
![]() (рис. 1.1)
(рис. 1.1)
|
Рис. 1.1 |
Найдем аргумент комплексного числа:
|
1.28 |
При изменении аргумента A (jω) с изменением ω в пределах от —∞ до +∞:
|
1.29 |
 ,
,
Согласно
(1.29), для подсчета изменения аргумента
необходимо подсчитать сумму изменений
аргументов выражений вида
![]() .
Это
изменение аргумента зависит от того, в
какой (правой или в левей) полуплоскости
лежит корень pi.
Рассмотрим
эти два случая.
.
Это
изменение аргумента зависит от того, в
какой (правой или в левей) полуплоскости
лежит корень pi.
Рассмотрим
эти два случая.
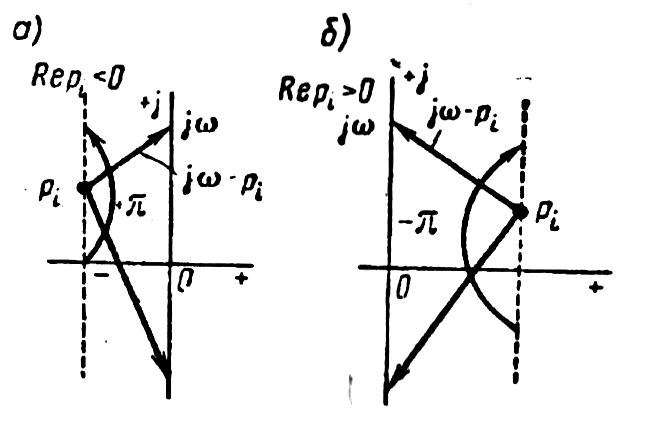
Корень pi, лежит в левой полуплоскости (рис. 1.2,а). При изменении ω в пределах от — ∞ до + ∞ конец вектора скользит вдоль мнимой оси снизу вверх, поворачиваясь против часовой стрелки на 180°, и, следовательно, изменение аргумента при этом:
|
1.30 |
Корень pi, лежит в правой полуплоскости (рис. 1.2,6). В этом случае, рассуждая аналогично, получим:
|
1.31 |
Допустим, что уравнение А(р) = 0 имеет m корней в правой полуплоскости и l корней в левой полуплоскости. При этом l + m = n.
|
Рис. 1.2 |
Тогда, на основании (1.27), (1.30) и (1.31):
|
1.32 |
Уравнение (7.32) представляет собой выражение принципа аргумента, который формулируется следующим образом, Изменение аргумента A (jω) при изменении ω от — ∞ до + ∞ равно разности между числом корней l (уравнения А (р) = 0), лежащих в левой полуплоскости, и числом корней т, лежащих в правой полуплоскости, умноженной на π.
К р и т е р и й М и х а й л о в а. Критерий устойчивости
А. В. Михайлова, сформулированный им в 1938 г., является по существу геометрической интерпретацией принципа аргумента. Пусть дано характеристическое уравнение системы (1.8):
, |
1.33 |
Полином А(р) в этом случае называется характеристическим полиномом. Для того чтобы система была устойчива, необходимо, чтобы все корни характеристического уравнения лежали в левой полуплоскости, т. е. чтобы т = 0. В этом случае согласно (1.32) должно удовлетворяться уравнение:
|
1.34 |
Из условия (1.34) следует, что все корни уравнения А(р)=0 лежат в левой полуплоскости.
Геометрическое
место конца вектора A
(jω) при
![]() называется годографом вектора A(jω),
или годографом Михайлова. Согласно
(1.33), уравнение годографа Михайлова:
называется годографом вектора A(jω),
или годографом Михайлова. Согласно
(1.33), уравнение годографа Михайлова:
|
1.35 |
где действительная и мнимая части комплекса соответственно будут:
|
1.36 |
|
1.37 |
Из (1.36) и (1.37) следует, что действительная часть является четной функцией ω:
|
1.38 |
а мнимая часть A (jω) является нечетной функцией ω:
|
1.39 |
Следовательно,
|
1.40 |
т.е. A (jω)и A (-jω) являются сопряженными комплексными величинами и, таким образом,
|
1.41 |
Учитывая (1.41), уравнение можно записать в виде:
|
1.42 |
 ,
,
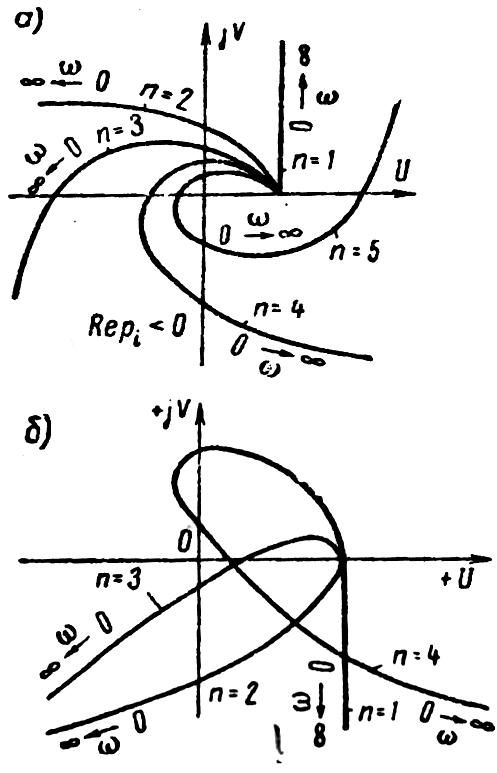
|
Рис. 1.3 |
Из
(1.42) следует формулировка критерия
устойчивости Михайлова. Система
автоматического регулирования
устойчива, если при изменении ω
от
0 до + ∞ вектор
А (jω)
поворачивается на угол
![]() где
n
— степень
характеристического уравнения А (р)
=
0; или, иначе, если годограф
A(jω)
с ростом ω
от 0 до
+∞,
начинаясь
на действительной оси, обходит
последовательно в положительном
направлении (против часовой стрелки) п
квадрантов.
где
n
— степень
характеристического уравнения А (р)
=
0; или, иначе, если годограф
A(jω)
с ростом ω
от 0 до
+∞,
начинаясь
на действительной оси, обходит
последовательно в положительном
направлении (против часовой стрелки) п
квадрантов.
На рис.1.3.а показаны годографы А (jω) устойчивых систем для разных значений п. Все они охватывают соответствующее число квадрантов в положительном направлении.
На рис.1.3.б показаны годографы неустойчивых систем. Все они не удовлетворяют условию обхода п квадрантов в положительном направлении.
Годограф А (jω) можно построить по уравнениям (1.36) и (1.37), задаваясь значениями ω и вычисляя U и V.
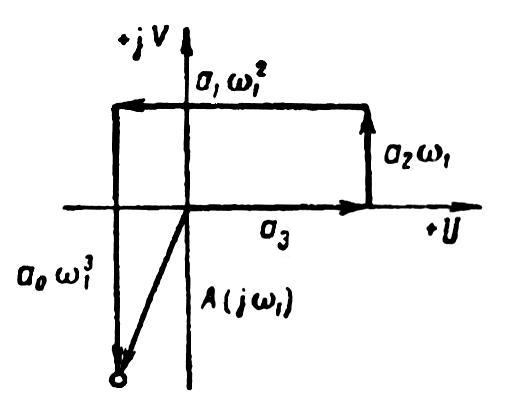
Годограф
можно также построить геометрически
исходя из выражения (1.35). Вектор А(jω)
при этом представляет собой замыкающую
многоугольника, стороны которого равны
соответственно
![]() и образуют между собой угол в 90°. На рис.
1.4 это построение показано для одной
точки ω
= ω
1,
когда:
и образуют между собой угол в 90°. На рис.
1.4 это построение показано для одной
точки ω
= ω
1,
когда:
|
1.43 |
Задаваясь значениями ω в пределах нуль — бесконечность, строят подобным образом весь годограф.
Согласно уравнению (1.6) характеристический полином замкнутой системы можно представить в виде суммы К(р) и D(p). Годографы D(jω) и K(jω) могут быть представлены в виде произведения более простых годографов, которые обычно известны и для типовых звеньев имеют простой вид. Отсюда следует, что для построения годографа А(jω) необходимо построить годограф D(jω), построить годограф K(jω), сложить векторы D(jω) и K(jω) для каждого значения ω.
|
Рис. 1.4 |
В случае, когда K(jω) = k, т. е. не зависит от частоты ω, построение упрощается. Последние две операции заменяются простым смещением годографа D(jω) вправо вдоль вещественной оси на величину k или, что то же самое, смещением мнимой оси влево на величину k.
Пример 7.3. Определить предельный коэффициент усиления kпр системы автоматической стабилизации напряжения генератора.
Передаточная функция разомкнутой системы имеет вид:
|
|
где k = k1 k2 k3.
Характеристическое уравнение замкнутой системы:
|
|
Для решения задачи следует построить годограф Михайлова:
|
|
Для этого построим вначале годограф:
|
|
Пусть T1= 2,0 сек, T2 = 0,5 сек, T3 = 0,1 сек.
Тогда:
|
1.44 |
|
|
 ,
,
и годограф D(jω) имеет вид, показанный па рис. 1.5.
Для того чтобы получить годограф А (jω) достаточно мнимую ось сместить влево на величину k. Из рис. 1.5 следует, что система будет на границе устойчивости, если k будет равно kпр, при котором годограф А(jω) пройдет через начало координат. Величина knp, как это видно из рис. 1.5, может быть определена из уравнений:
|
Рис. 1.5 |
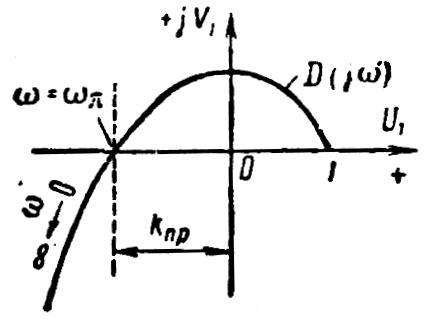
|
1.44` |
где ω — частота пересечения, т. е. частота, соответствующая точке пересечения годографа D (jω) с действительной осью.
Решая уравнения (1.44) и (1.44'), для ω = ωπ получим:
|
1.45 |
|
|
 ,
,
Легко заметить, что при подстановке выражений ωπ, τ2, τ3 формулы (1.45) и (1.24) совпадают.
К р и т е р и й Н а й к в и с т а. Для исследования устойчивости усилителей с обратной связью Найквист в 1932 г. предложил критерий устойчивости, основанный на исследовании частотных характеристик системы. Этот критерий был по-новому обоснован, обобщен и применен в теории автоматического регулирования А. В. Михайловым в 1938 г. Для исследования устойчивости замкнутой системы регулирования согласно этому критерию необходимо знать частотный годограф разомкнутой системы. Эту характеристику можно получить как аналитически, так и экспериментально. Последнее обстоятельство выгодно отличает рассматриваемый критерий устойчивости от ранее изложенных.
Критерий устойчивости Найквиста имеет ясный физический смысл. Он связывает стационарные частотные свойства разомкнутой системы с нестационарными свойствами замкнутой системы.
Критерий устойчивости, основанный на построении частотного годографа разомкнутой системы. Пусть передаточная функция разомкнутой системы регулирования:
|
|
Образуем функцию:
|
1.46 |
Числитель этой функции представляет собой характеристический полином замкнутой системы, знаменатель — характеристический полином разомкнутой системы. Пусть степень D(p) равна n и степень K(p) равна r. Из физических соображений следует, что:
|
1.47 |
В
противном случае, при
![]() из
передаточной функции W(р)
можно
выделить слагаемые с р
выше
нулевой степени, что соответствует
дифференцирующим звеньям, которые, как
было указано в гл. III,
не могут быть реализованы на практике.
I
из
передаточной функции W(р)
можно
выделить слагаемые с р
выше
нулевой степени, что соответствует
дифференцирующим звеньям, которые, как
было указано в гл. III,
не могут быть реализованы на практике.
I
Учитывая неравенство (1.47), можно утверждать, что степень полинома D(p)+K(p) также равна п.
Рассмотрим два случая состояния разомкнутой системы: устойчива и неустойчива.
1-й случай — система в разомкнутом состоянии устойчива.
Тогда согласно критерию устойчивости Михайлова изменение аргумента характеристического полинома разомкнутой системы:
|
|
 ,
,Если потребовать, чтобы система в замкнутом состоянии была устойчива, то должно удовлетворяться равенство:
|
|
 ,
,Из (1.46) при этом следует, что:
|
1.48 |
 ,
,
Таким образом, система автоматического регулирования устойчива, если изменение аргумента вектора F(jω) при изменении ω от 0 до ∞, равно нулю.
На рис. 1.6, а показаны два годографа F(jω) = 1 + Wp (jω) соответствует устойчивой системе: он не охватывает точку (0,0), II — неустойчивой: он охватывает точку (0,0).
|
Рис. 1.6 |
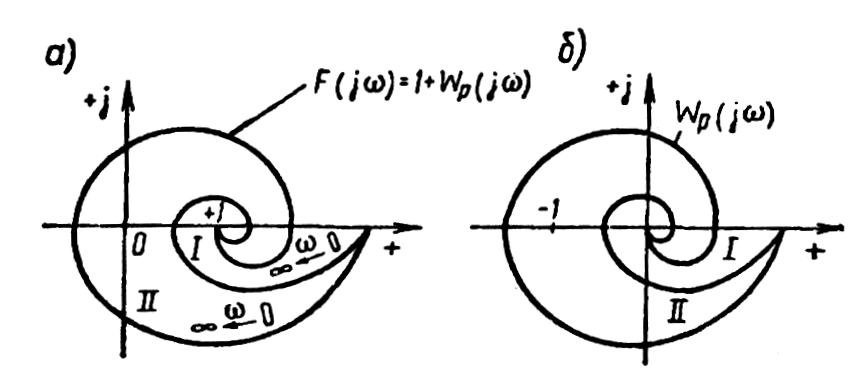
Так как F(jω) отличается от Wp (jω) на +1, то сказанное можно сформулировать непосредственно для характеристики Wp (jω) (см. рис. 1.6, б).
Замкнутая система устойчива, если годограф разомкнутой системы Wp (jω) не охватывает точку (—1,j0).
Пример 1.4. Применим критерий Найквиста для определения предельного коэффициента системы регулирования, рассмотренной в примере 1.3 для которой:
|
|
Частотные годографы для этой системы при разных значениях k показаны на рис. 1.7. Согласно критерию Найквиста, при k=k1 система устойчива, при k = k2 — неустойчива.
|
Рис. 1.7 |

Для определения значения kпр необходимо найти значение k, при котором годограф проходит через точку (—1,j0), т. е. решить уравнение:
![]() ,
,
или
![]()
Составив уравнения для мнимых и действительных частей этого уравнения, находим ωπ и kпр:
![]()
Полученное решение совпадает с формулами (1.45) и (1.24), найденными с помощью критериев Михайлова и Гурвица.
2-й случай — система в разомкнутом состоянии неустойчива.
При рассмотрении многоконтурных и одноконтурных систем, содержащих неустойчивые звенья, разомкнутая система может оказаться неустойчивой.
Пусть система в разомкнутом состоянии неустойчива, при этом характеристическое уравнение разомкнутой системы имеет m корней в правой полуплоскости. Тогда согласно принципу аргумента (1.32):
|
|
или, учитывая симметрию характеристик для +ω и –ω,
|
|
 ,
,Если потребовать, чтобы система в замкнутом состоянии была устойчива, то должно выполняться равенство:
|
|
 ,
,При этом [согласно (1.46)]:
|
1.49 |
 ,
,Таким образом, система автоматического регулирования устойчива, если при изменении ω от нуля до бесконечности годограф разомкнутой системы Wp (jω) охватывает m/2 раз точку (—1; j0) в положительном направлении, где т — число корней характеристического уравнения разомкнутой системы, лежащих в правой полуплоскости.
|
Рис. 1.8 |
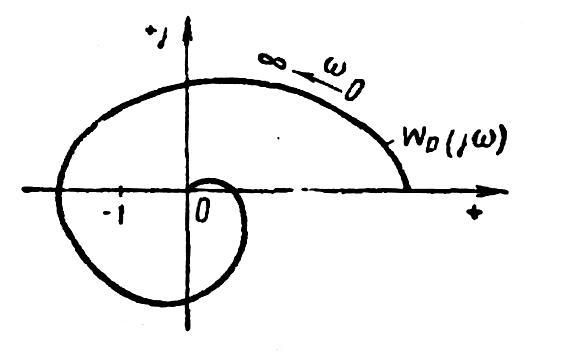
Кратность охвата может быть наглядно определена числом оборотов, совершенных вектором, проведенным из точки ( —1;j0) в текущую точку годографа.
На рис. 1.8 показан годограф устойчивой системы в замкнутом состоянии, которая в разомкнутом состоянии неустойчива, а число корней ее т = 2. Годограф охватывает в положительном направлении точку (—1, j0) один раз (m/2 =1) следовательно, согласно (1.49) система в замкнутом состоянии устойчива.