

1.3.1 Основні методи побудови державної геодезичної мережі та мереж згущення
Планові опорні геодезичні мережі – це точки з відомими координатами (Хі, Уі), які фундаментально закріплені на земній поверхні або на спорудах і визначені на основі лінійних та кутових вимірювань.
Залежно від геометричної форми та безпосередньо виміряних елементів розрізняють чотири основні методи створення планових мереж та їх поєднання: тріангуляція, полігонометрія, трилатерація, супутниковий метод.
Тріангуляція – це мережа трикутників, що межують один з одним, у яких вимірюють усі кути й хоча би одну сторону. Довжини сторін трикутників у ланках тріангуляції можуть сягати 20-25 км. Метод тріангуляції запропонував у 1617 році голландський вчений Снелліус при вимірюванні дуги меридіану між містами Алькаамаром і Берген-он-Зоомом.
Геодезична мережа складається з трикутників у яких вимірюються всі кути і одна або кілька сторін. Мережу редукують (відносять) на поверхню земного еліпсоїда або на площину. Маючи координати вихідної точки і азимут лінії, обчислюють координати всіх точок мережі.
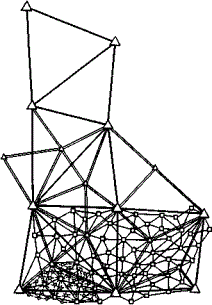
Рис. 1.2. Схема побудови геодезичних мереж 1,2,3 і 4-го класів методом тріангуляції
а)
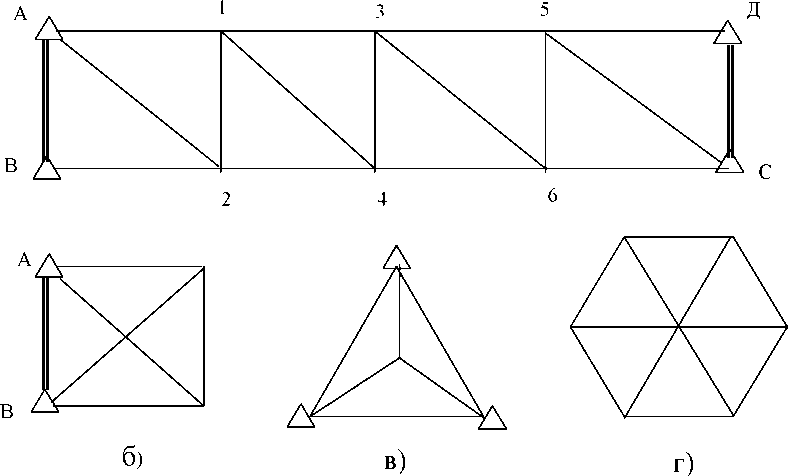
Рис 1.3. Типові фігури тріангуляції: а) ряд трикутників (ланка тріангуляції, що складається із восьми трикутників); б) геодезичний чотирикутник; в) вставка пунктів у трикутник; г) центральна система.
Чотирикутник АВСД - базисна мережа. Базисні мережі будувались для визначення довжини сторони трикутника. Сторона АВ безпосередньо не вимірювалась. Вимірювався базис – лінія МИ та вісім кутів чотирикутника – ромба, що отримав назву геодезичного чотирикутника. У цьому чотирикутнику більша діагональ АВ, що визначалась, одночасно є стороною першого трикутника ланки. Базис вимірювався підвісними мірними приладами. Такі сторони, як АВ, називають вихідними. Базисні мережі будувалися до появи світловіддалемірів. Світловіддалемірами можна вимірювати довжини сторін трикутників, не будуючи базисних мереж. Сторони, безпосередньо виміряні світловіддалемірами, називають базисними. Ланки тріангуляції зазвичай складаються з 10-12 трикутників. Віддалі між кінцевими пунктами ланки можуть сягати 200-250 км. Ланки, як правило, прокладають уздовж меридіанів та паралелей. Чотири такі ланки (дві – уздовж паралелей, дві – уздовж меридіанів) створюють полігон периметром 800-1000 км [34]. Усередині полігон заповнюють суцільною мережею трикутників тріангуляції такого самого класу або нижчого за точністю. Вершини трикутників, закріплені на місцевості, називають пунктами тріангуляції. Координати початкових (вихідних) пунктів на кінцях ланки та азимути сторін визначають з астрономічних спостережень.
Табл. 1.4.
Горизонтальні кути та довжини сторін при тріангуляції
Характеристика / класи |
1 |
2 |
3 |
4 |
Довжини сторін трикутників, км |
20-25 |
7-20 |
5-8 |
2-5 |
Відносні похибки визначення базисних сторін |
1:400000 |
1:300000 |
1:200000 |
1:100000 |
Середня квадратична похибка вимірювання кутів,” |
+0,7 |
+1,0 |
+1,5 |
+2,0 |
На таких пунктах, показаних на рисунку 1.1 п’ятикутними зірками, виконують астрономічні визначення, а також визначення прямих та зворотних азимутів сторін. Такі пункти називають пунктами Лапласа. Горизонтальні кути та довжини сторін визначають із геодезичних вимірювань. Мережі, де поєднують астрономічні й геодезичні вимірювання, називають астрономо-геодезичними. Метод тріангуляції приміняють у відкритій і напіввідкритій місцевисті, гірській місцевості.
Полігонометрія – побудована на місцевості система ламаних ліній (рис. 1.4) з виміряними відрізками Sі та горизонтальними кутами. Ламана лінія – це полігономегричний хід. Відрізки – сторони полігонометричного ходу. Горизонтальні кути βі між відрізками – кути повороту ходу, вершини полігонометричного ходу, позначені на рисунку кружками, пронумеровані 1, 2, ...,і, п+1 є пунктами полігонометричного ходу. Пункти полігонометрії фундаментально закріплені на місцевості, як і пункти тріангуляції чи трилатерації.
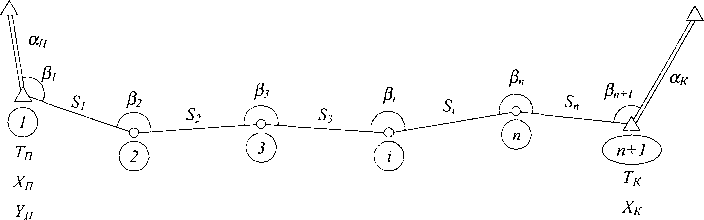
Рис. 1.4. Полігонометричний хід, прокладений між пунктами тріангуляції (Тп- початковий, Тк - кінцевий) з відомими координатами і дирекційними
кутами
Табл. 1.5.
Характеристика довжини сторін при полігонометрії
Характеристика / класи |
1 |
2 |
3 |
4 |
Довжина сторін, км |
20-25 |
7-20 |
5-8 |
2-5 |
Відносна похибка вимірювання сторін |
1:300000 |
1:250000 |
1:200000* (1:150000) |
1:150000* (1:100000) |
Середня квадратична похибка вимірювання |
0,4 |
1,0 |
1,5 |
2,0 |
Метод полігонометрії вважають рівноцінним із методом тріангуляції. Тому і вимоги до мереж полігонометрії майже такі самі, як до мереж тріангуляції [34].
Для сторін полігонометрії 3 та 4 класів, близьких до мінімальних, допускають відносні похибки 1:150000 та 1:100000 відповідно.
В закритій місцевості застосовують метод полігонометрії у вигляді різного роду ходів і полігонів.
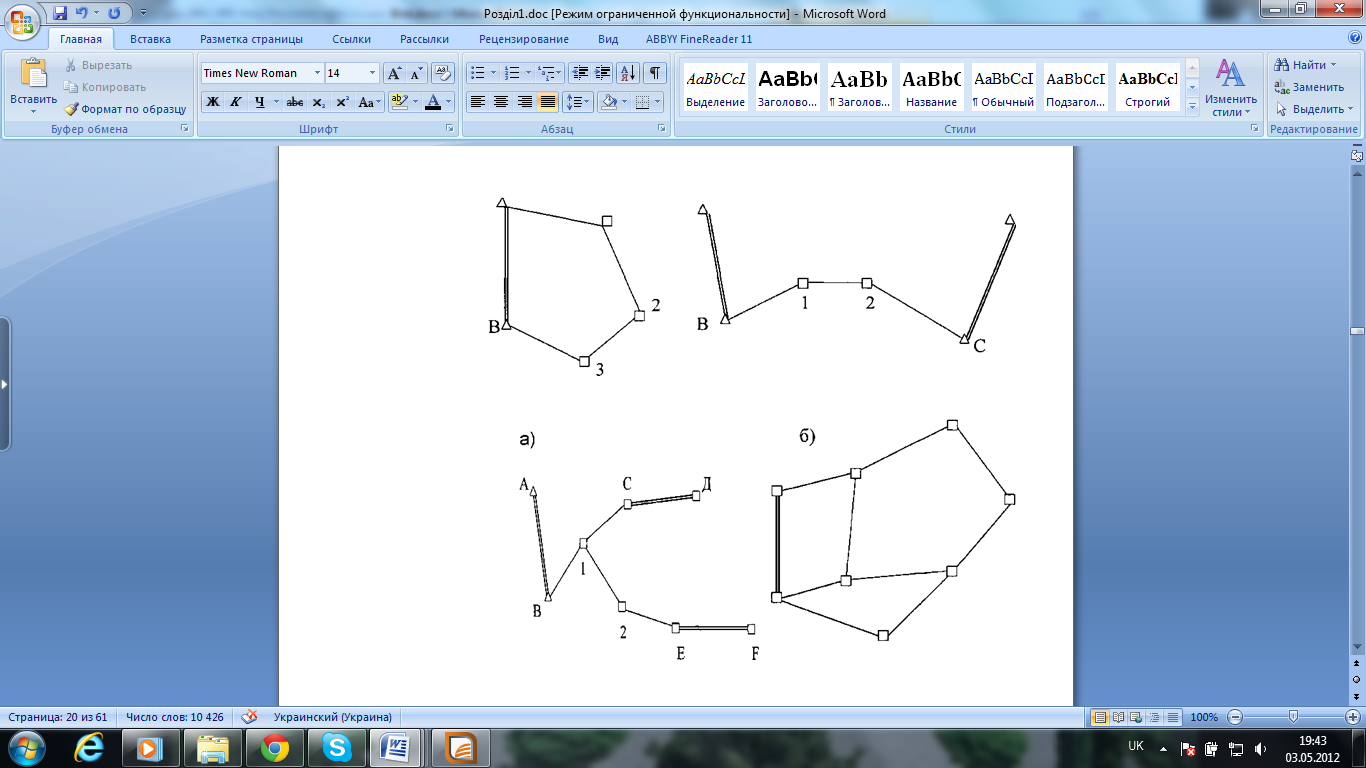
Рис. 1.5. Типові схеми полігонометрії: а) замкнутий хід; б) розімкнутий хід; в) хід з вузловою точкою; г) система полігонів.
Спосіб полігонометрії був першим методом визначення геодезичних координат як найбільш простий і природний для безпосереднього одержання координат на земній поверхні. Проте він поширювався мало через складність і трудомісткість вимірювання ліній, а з появою методу тріангуляції застосовувався ще рідше.
До недавнього часу полігонометрія і тріангуляція були основними методами побудови державних геодезичних мереж. Вони були добре вивчені як у теоретичному так і в практичному плані.
В останній час широке примінення находять методи побудови геодезичних мереж - трилатерація і лінійно-кутові мережі. У першому методі вимірюються лише сторони трикутників (кутів не виміряють), а в другому виміряють всі кути і всі сторони. В трилатерації виміряють всі довжини сторін радіовіддалемірами або світловіддалемірами, що дає більшу точність. Лінійно-кутовий метод – найточніший метод визначення геодезичних координат.
Трилатерація – це також ланки трикутників, як і в тріангуляції, що межують один з одним, але з виміряними сторонами, а не кутами. Вершини трикутників мережі трилатерації називають пунктами трилатерації. Кінцева мета створення трилатерації, як і створення тріангуляції – визначення планових координат пунктів.
Табл. 1.6.
Основні вимоги до побудови мереж трилатирації 4 класу та 1 і 2 розрядів
Характеристика / класи, розряди |
4 клас |
1 розряд |
2 розряд |
Довжина сторони трикутника, км |
2-5 |
0,5-5 |
0,25-3 |
Гранична довжина ланки трикутника між вихідними сторонами або між вихідними пунктом і вихідною стороною, км |
14,0 |
7,0 |
4,0 |
Максимальна довжина вихідної сторони,км |
2,0 |
1,0 |
1,0 |
Відносна середня квадратична похибка вимірювання сторони мережі |
1:120000 |
1:80000 |
1:40000 |
Через цілий ряд чинників трилатерація не застосовується широко при побудові геодезичної основи на території міст [36]. По-перше, в трикутниках трилатерації без додаткових вимірювань не виникає жодного умовного рівня. По-друге, в трипатерації не завжди можна отримати надійне орієнтування мережі, що призводить до значних поперечних зсувів пунктів і негативно позначається на якості мережі в цілому. По-третє, несприятливі умови вимірювання відстаней світловіддалемірами знижують якість цих робіт, а значить, і якість мережі.
На території міст полігонометрія в порівнянні з трилатерацією має більшу гнучкість, що, правда, не можна сказати про будівництво висотних споруд. Проте до появи світловіддалемірів (світловіддалеміри у геодезичному виробництві з’явились тільки після Другої світової війни) тріангуляція займала провідне місце як метод створення державних геодезичних мереж. Метод полігонометрії застосовувався значно менше, переважно через складність вимірювання ліній.
Супутниковий метод створення мереж розуміє під собою у наш час поширену систему GPS – Global Positioning System (глобальна пошукова система). Принцип визначення розміщення наземних пунктів системою GPS. GPS- приймач, що встановлюють на пункті, координати якого визначають (пункт Р на рис.1.6), приймає радіосигнали від штучних супутників Землі, що мають відомі миттєві координати; приймач вимірює віддалі R1, R2, R3, ..., Rt до супутників (не менше від чотирьох). Координати супутників передаються на GPS-приймач. Відповідно до рис.1.7 можна записати чотири такі рівняння:
R1=√(Х,-XP)2 +(Yl-YP)2+(Zl-ZP)2
R2=√ (X2 -Xp)2 +(F2-YP)2 + (Z2 -ZP)2
R3=√(X3 -XP)2+(Y3-Yp)2+(Z3 -ZP)2
Ri=√(Xt -X)2 +(W-YP)2+(Zj- Zp )2
У системі три невідомі ХР, YP, ZP. Насправді є чотири невідомі: крім ХР, YP, ZP, ще невідома асинхронність (різниця похибок показів хронометрів супутника та приймача). Саме тому потрібно
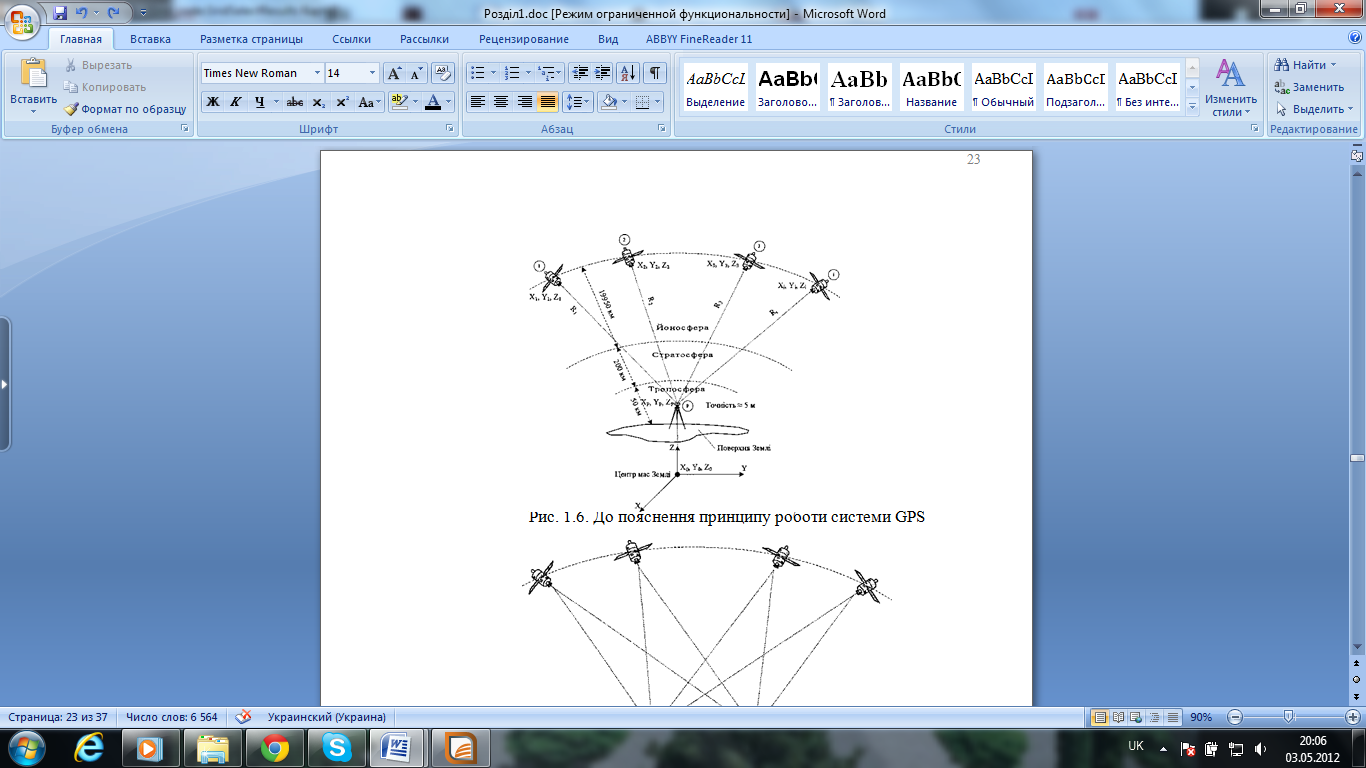
Рис. 1.6. До пояснення принципу роботи системи GPS
спостерігати мінімум чотири супутники. Розв’язавши ці рівняння, знайдемо шукані координати точки Р. Електронно-обчислювальна система GPS-приймача розв’язує ці рівняння і відображає на дисплеї координати
XР,YP,ZP.
GPS-приймачі пристосовані до визначення прямокутних геодезичних координат X, Y, Z (з початком у центрі мас Землі), топоцентричних прямокутних координат X, Y, Н (із початком координат на топографічній поверхні Землі) та геодезичних координат В, L, Н (широти, довготи та висоти). Визначають геоцентричні координати з точністю до 5 м. Така точність не задовольняє вимог геодезії.
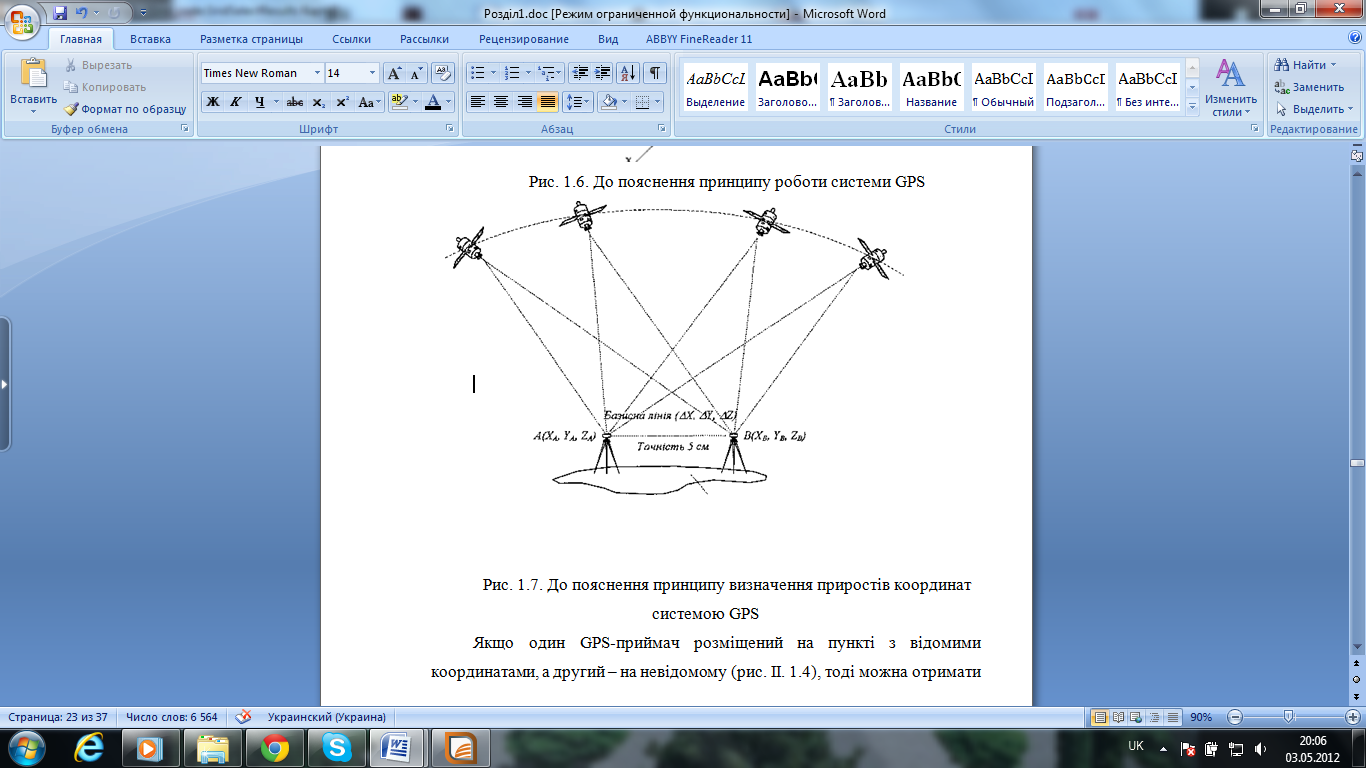
Рис. 1.7. До пояснення принципу визначення приростів координат системою GPS
Якщо один GPS-приймач розміщений на пункті з відомими координатами, а другий – на невідомому (рис.1.7), тоді можна отримати прирости координат АХ, A Y, AZ. Такі відносні, а не абсолютні визначення координат значно (приблизно в 100 разів) точніші. Похибка визначення координат близько 5 см може бути зменшена збільшенням часу спостереження.
Як це зрозуміло з рисунка, GPS-технології дають змогу одночасно визначати як планове, так і висотне положення наземних пунктів. У геодезії також широко застосовується відносний метод визначення координат.
Висновки до розділу 1
Під топографо-геодезичним забезпеченням слід розуміти два взаємопов’язаних компоненти: геодезичну основу (мережу) та топографічні продукти.
Державна геодезична мережа України – це мережа геодезичних пунктів, рівномірно розміщених на території держави, що забезпечує поширення координат та висот, і є вихідною для створення інших мереж. Задає, є носієм на всій території країни референцну систему координат та поширює з необхідною точністю, щільністю пунктів ДГМ загальноземну систему координат. Вона є головною геодезичною основою топографічних знімань усіх масштабів. Об'єднує в єдине ціле планову і висотну геодезичні мережі. Планова геодезична мережа поділяється на: астрономо-геодезичну мережу 1 та 2 класів; геодезичні мережі згущення 3 класу. Висотна геодезична мережа поділяється на: нівелірні мережі І і II класів; нівелірні мережі III і IV класів.
Державна геодезична мережа створюється відповідно до вимог діючих "Основних положень про державну геодезичну мережу України", інструкцій та інших нормативних документів.
Залежно від геометричної форми та безпосередньо виміряних елементів розрізняють чотири основні методи створення планових мереж та їх поєднання: тріангуляція, полігонометрія, трилатерація, супутниковий метод.
Загальний розвиток суспільства визначає нові завдання топографо-геодезичної галузі – це підвищення вимог до якості, повноти та сучасності картографічної продукції, технологій її отримання та використання, розширення її асортименту, своєчасного оновлення на основі впровадження картографо-геодезичного моніторингу, забезпечення максимального доступу користувачів до геодезичної та картографічної інформації .
При здійсненні дослідження методичною основою слугували методи порівняння, аналізу й синтезу, класифікації та типізації, прогнозування, , системний та історичний. При створенні серії схем розвитку геодезичного забезпечення на рівні спеціального методу використано геоінформаційне моделювання.
РОЗДІЛ 2. ТОПОГРАФО-ГЕОДЕЗИЧНЕ ЗАБЕЗПЕЧЕННЯ ПУТИ-ЛЬСЬКОГО РАЙОНУ ЧЕРНІВЕЦЬКОЇ ОБЛАСТІ