

Вопрос 28
Интегральные показатели качества переходных процессов в САУ
Интегральные оценки качества интегральные оценки дают обобщенную оценку быстроты затухания и величины отклонения регулируемой величины, в виде единого числового значения.
I1= – для непериодических процессов
– для непериодических процессов
I2= (t)
dt
– для колебательных процессов
(t)
dt
– для колебательных процессов
Вопрос 19
Автоматические регуляторы: классификация; регуляторы непрерывного действия.
Автоматические регуляторы - это устройство, предназначенное для стабилизации какого то параметра (например to)
Регуляторы :
Непрерывного действия
Прерывного (позиционные)
По видам технологических параметров: p,t,перемещение.
Какой параметр такой регулятор
Энергии- по роду энергии: электро, гидро,пневмо.
Комбинированное
По виду регулирующего воздействия
Прямого
Непрямого действия
Регулирование непрерывного действия действуют по разным законам. В соответствии с законом они подразделяются :
Пропорциональные (П)
Интегральные (И)
Пропорционально- интегральные (ПИ)
Пропорционально- дифференциальные (ПД)
Пропорционально - интегрально- дифференциальные (ПИД)
(П)
 ; U=
Kp*
; U=
Kp*
Kp – статистический коэффициент передачи
(И)
U=Ku
U -
управляющее воздействие
-
управляющее воздействие
(ПИ)
U=
Kp
+
Ku
 dt
dt

( ПД)
) U=
Kp
ПД)
) U=
Kp Kd
Kd (ПИД) U=
Kp
+
Kd
+
Ku
dt
(ПИД) U=
Kp
+
Kd
+
Ku
dt
Вопрос 20
Позиционные регуляторы: релейные и импульсные.
Позиционные : релейные, импульсные





U =




 y3
2а
y3
2а
Позиционный (релейный) регулятор. Он вырабатывает сигнал, который перемещает РО в одно из фиксированных положений (позиций). Уравнение автоматической системы регулирования с позиционным регулятором определяется статической характеристикой в отличие от двухпо-зиционных кроме двух устойчивых положений — «больше» В\ и «меньше» В2 — обеспечивают еще и третье — «норма
Вопрос 21
Коррекция свойств САУ: виды коррекции
По способу включения делятся на:
Параллельное
Последовательное
Смешанное
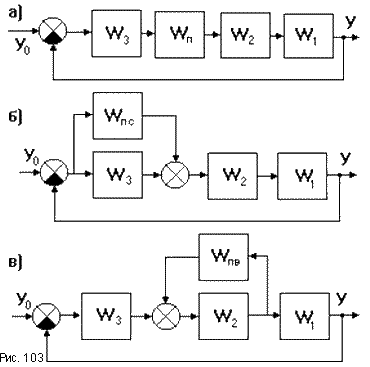
Последовательное корректирующее устройство с передаточной функцией Wп включается обычно после предварительного усилителя. На рис.а предварительный усилитель имеет передаточную функцию W3, выходной каскад усилителя - W2, исполнительный элемент - W1.
Параллельное
корректирующее устройство с передаточной
функцией Wпс (рис.б) может иногда при
меньшей сложности обеспечить нужное
преобразование сигнала. Например, для
коррекции свойств САУ часто требуются
дифференцирующие и форсирующие звенья,
которые конструктивно очень сложны. В
то же время параллельно-согласное
включение предварительного усилителя
(W3 = K3) и простого апериодического звена
с передаточной функцией Wпс =
 позволяет реализовать функцию реального
форсирующего звена. Такое соединение
можно заменить эквивалентным форсирующим
звеном с передаточной функцией
позволяет реализовать функцию реального
форсирующего звена. Такое соединение
можно заменить эквивалентным форсирующим
звеном с передаточной функцией