

Вопрос-1
Основные понятия и определения теории автоматического управления
Автоматика- отрасль науки и техники охватывающая совокупность методов и технических ср-в освобождающих человека от непосредственного выполнения операций по контролю и управлению производственными процессами и техническими устройствами.
Теория автоматического управления(ТАУ)- это научно техническая дисциплина, в рамках которой изучаются процессы управления, методы исследования и основы проектирования САУ.
Управление- это процесс, обеспечивающий необходимое по целевому назначению протекания процессов преобразование в-ва информации, поддержание работоспособности и безаварийности функционирования объекта путем сбора и обработки информации состоянии объекта и внешней среды, выработки решений о воздействии на объект и их испытании.
Автоматизация – это высшая ступень механизации, применяемая непосредственно в производстве.
Регулирование – это поддержание одного или нескольких процессов. Простая функция, чем управление.
САУ – это замкнутая динамическая система, состоящая из ОУ и автоматического регулятора или контроллера.
Виды систем автоматизации производства
Автоматический контроль (автоматические сигнализацию, измерение, сортирование и сбор информации).
Автоматическая сигнализация предназначена для оповещения обслуживающего персонала о предельных или аварийных значениях каких-либо физических параметров, месте и характере нарушений ТП.
Автоматическое измерение служит для измерения и передачи на специальные указательные или регистрирующие приборы значений физических величин, характеризующих ТП или работу машин.
Автоматическое сортирование предназначено для контроля и разделения продукции по размеру, массе, твердости, вязкости и другим показателям
Автоматический сбор информации необходим для получения информации о ходе ТП, качестве и количестве выпускаемой продукции и для дальнейшей обработки, хранения и выдачи информации обслуживающему персоналу.
Автоматическая защита представляет собой совокупность технических средств, которые при возникновении ненормальных или аварийных режимов либо прекращают контролируемый производственный процесс (сигнализация, оповещение световые звуковые).
Дистанционное управление объединяет в себе методы и технические средства управления установками и различными объектами на расстоянии. Импульсы на управление подаются персоналом по линиям связи с помощью соответствующих кнопок, ключей и другой командной аппаратуры.
Автоматическое регулирование – это поддержание одного или нескольких процессов.
Классификация.
По виду использования энергии:
-электрические
-пневматические
-гидравлические
По принципу управления:
-замкнутые-разомкнутые
-комбинированные
По принципу действия:
-прямого
-непрямого
По величине установившейся ошибки:
-статические
-астатические
По виду задающегося сигнала:
-система стабилизации
-программное управление
-следящие системы
-адаптированные системы
2…..2. Обобщенная структурная схема сау
Система автоматического управления (рис 1.1) содержит: устройство управления (УУ) или регулятор, на вход которого подается задающее воздействие (входной сигнал или совокупность сигналов) хвх(t). Задающее воздействие определяет требуемый закон управления. В результате этого воздействия на выходе регулятора вырабатывает управляющее воздействие U(t), которое поступает на вход объекта управления (ОУ).

Под ОУ в данном курсе понимается любое техническое устройство (станок, самолет, турбина и т.д.), для функционирования которого необходимы специально организованные воздействия U(t). Качество управления оценивается по значениювыходной величины объекта хвых(t) – это обычно главный технологический параметр (скорость, мощность, производительность и т.д.).Наряду с хвх(t), внешним по отношению к рассматриваемой САУ явяляются возмущающее воздействие хвозм(t), которое, как и U(t), приложено к ОУ. К числу таких возмущений можно отнести момент сопротивления при металлообработке, колебание напряжения в сети, ветровую нагрузку и т.д. Возмущающие воздействия искажают требуемый закон управления. Очевидно, что в первом приближении задача синтеза САУ состоит в разработке такого УУ, с которым и при наличии существенных возмущающих воздействий отклонение требуемого закона управления ОУ от фактического не превышает допустимых значений. Объектом управления может быть техническое устройство, технологический процесс или более простая система управления. Состояние объекта управление определяется рядом величин, характеризующих как воздействия на объект внешней среды и управляющих устройств, так и протекание процессов в нутрии объекта.Внешнее влияние на объект – воздействие.Воздействие, вырабатываемое управляющим устройством – управляющее воздействие. Воздействие, не зависящее от системы управления – возмущение.Контролируемые величины, характеризующие состояние объекта, по которым ведётся управление, называется управляемыми (регулируемыми).
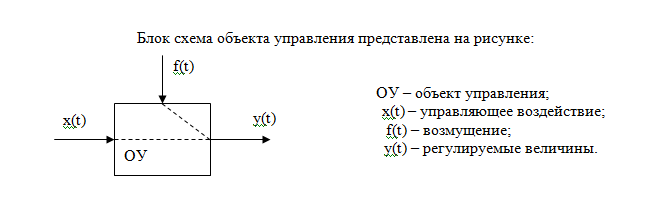
При изображение системы управления (регулирования) применяются два принципа: функциональный и структурный.Функциональная схема – блок-схема системы, заданная функциональным назначением элементов.Структурная схема – блок-схема системы, заданная математическими характеристиками элементов.
Билет-3
3.Понятие обратной связи Обратные связи и их назначение
Из анализа процесса управления видно, что в организации самого процесса большую и решающую роль играет получение информации о результатах управления. При получении такой информации решение об управляющих действиях существенно зависит от результатов управления. Иными словами – первичный элемент, управляющий действием, зависит от вторичного элемента, вызываемый управляющим действием, т.е. причина, вызывающая изменение состояния ОУ находится в зависимости от того, какой результат она вызовет. Такая связь причины и следствия называется причинно-следственной или обратной связью.
Обратная связь – это связь по которой информация о состоянии ОУ (контролирующее воздействие, соответствующее действительному значению управляемой величины) передается с выхода системы на ее вход.
Обратные связи подразделяются:1. отрицательные и положительные;2. жесткие и гибкие;3. местные и главные.Если воздействие обратной связи, поступающее на вход системы по знаку совпадает со знаком задающего воздействия, то ее называют положительной, в противном случае связь определяют как отрицательную.
В автоматике ООС и ПОС принято указывать, начиная с функциональных схем следующим образом.Если передаваемое воздействие зависит только от выходной величины и не зависит от времени – связь считают жесткой. Жесткие обратные связи, действуют как в установленном, так и в переходном режиме.
Обратная связь, оказывающая влияние на работу системы только в переходном процессе (режиме) называется гибкой. Такие связи реагируют на приращение воздействий, поступающих на вход системы. Те из них, что реагируют на производные от воздействий называются дифференцирующими гибкими связями, а те, которые реагируют на интегралы от воздействий, называются интегрирующими обратными гибкими связями.Если обратная связь соединяет выход системы с ее входом, то ее называют главной, а остальные же обратные связи называют местными.Такие связи служат для улучшения регулировочных свойств отдельных элементов или их групп, соединяя выход элемента, или группы с соответствующим входом. Такие связи, кроме названия местные именуют корректирующими. Местные и главные связи могут быть как жесткими, так и гибкими.В случае размыкания главной обратной связи система работающая по замкнутому циклу переходит в режим работы по разомкнутому циклу. В случае же размыкания местной обратной связи система продолжает работать по заложенному в нее циклу. Понятие обратной связи.
Важной особенностью большинства управляемых процессов является обратная связь. Понятие обратной связи можно легко проиллюстрировать с помощью простого примера моряка, управляющего кораблем с помощью рулевого колеса (рис. 2). Штурвальный выдерживает курс судна в соответствии с заданными командами. Этот метод управления, обозначаемый термином «управление с разомкнутым контуром», страдает несколькими серьезными недостатками. Так, при изменении характеристик привода – исполнительного механизма, изменяющего положение руля, – судно будет сбиваться с курса, если рулевой не имеет никакой информации о действительном направлении движения.

Если бы рулевой постоянно следил за курсом судна по компасу, сравнивал его с заданным и вращал штурвал так, чтобы уменьшить выявленную ошибку, судно приблизительно выдерживало бы нужный курс (рис. 3). Можно заметить, что в этом случае штурвальный выполняет три основные функции – обнаруживает отклонение действительного исполнения от заданного, принимает решение о коррекции действия и реализует его с помощью штурвала. Эти действия по обнаружению и коррекции ошибки, а также по управлению показаны на рис. 3 как обратная связь от управляемой величины к управляющей. В такой системе фигурирует не только направление движения корабля, задаваемое положением штурвала, но и само положение штурвала зависит от этого направления. Взаимозависимость двух величин – положения штурвала и курса судна – определяет концепцию, называемую в инженерной среде обратной связью, а термин «автоматические системы управления» обычно относится к автоматическим системам, построенным на этой концепции; часто такие системы называются также «системами управления с обратной связью» или «системами с замкнутым контуром».

Вопрос-4
Понятие о статических и динамических характеристиках элементов САУ
Статическая характеристика- это зависимость выходной переменной от входной в установившемся режиме.
Методы линеаризации уравнений статики:
1 Метод малых отклонений. Основан на разложении аналитической функции у=f(х) в ряд Тейлора и отбрасывании малозначащих членов.
Ду=/1(*о)+/1'(
хо)Лхо +-А\х0)Ах2 + ...
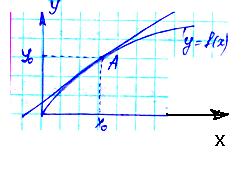
2) Метод касательной основан на замене участка кривой прямой линией, касательной к этой кривой в точке А (х0,у0), называемой рабочей точкой и находящегося в середине рабочего диапазона изменения ^х.
y(x)=y(x0)+y’(x0)(x-x0) Δy=k Δx
y-y0=y’(x0)(x-x0) k-передаточный коэффициент k=y’(x0)
Δy=y’(x) Δx