

9. Метод комбинационных частот
В этом случае мы имеем некоторый набор частот,но все они одного порядка величин, а необходимые ступени уменьшения частот создаются последующим вычитанием каждой последующей из первой. Пример:
f1= 10000 к Гц, f2= 9000 кГц, f3= 9900 кГц, f4= 9990 кГц, тогда f= 10000 кГц.
f1-f2 = 1000 кГц, f1-f3= 100 кГц, f1-f4 = 10 к Гц. система уравнений будет иметь вид:


……………………………

10. Модуляция электромагнитных колебаний.
Совместное использование колебаний несущих и масштабных частот позволяет решить трудности как с разрешением неоднозначности, так и с обеспечением необходимой точности измерений. Возникает необходимость введения в схему дальномера дополнительных технических устройств, позволяющих управлять одним из параметров несущих колебаний. Процесс управления параметрами наз. модуляция, а устройства – модуляторы. Колебания, возникающие в результате такого управления называются модулированными. Различают 3 вида модуляций:
1)амплитудную
2) частотную
3) фазовую
11. Амплитудная модуляция электромагнитных колебаний
А мплиту́дная
модуляция —
вид модуляции,
при которой изменяемым параметром несущего
сигнала является
его амплитуда.
мплиту́дная
модуляция —
вид модуляции,
при которой изменяемым параметром несущего
сигнала является
его амплитуда.
 +
+ +
+
Аmin - амплитуда несущих колебаний при отсутствии модуляции
Аmax- максимальное изменение амплитуды несущих колебаний. Коэффициент m является основным параметром амплитудной модуляции.
ω- угловая круговая частота, S- характеристика гармонического колебания, φ0- начальная фаза сигнала , Ω – частота модулируемых колебаний
12. Частотная модуляция электромагнитных колебаний.
П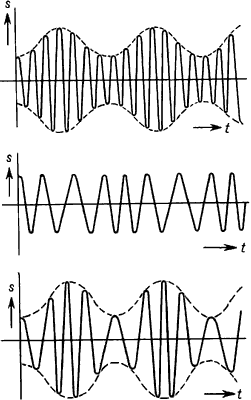 ри
реализации частотно-модулируемых
колебаний с течением времени меняется
не амплитуда, а частота несущих
колебаний.По сравнению с амплитудной
модуляцией здесь амплитуда остаётся
постоянной.
ри
реализации частотно-модулируемых
колебаний с течением времени меняется
не амплитуда, а частота несущих
колебаний.По сравнению с амплитудной
модуляцией здесь амплитуда остаётся
постоянной.
 A{j0(β)
cos(ωΔt+φ0)+j1(β)cos[(ω0+Ω)t+
φ0]-v1(β)
[(ω-Ω)t+
φ0]}
A{j0(β)
cos(ωΔt+φ0)+j1(β)cos[(ω0+Ω)t+
φ0]-v1(β)
[(ω-Ω)t+
φ0]}
Δω – максимальное отклонение круговой частоты под воздействием модулирующих колебаний( девиация- отклонение от нормы); Δω/Ω – индекс частотной модуляции; j0,j1 – вспомогательный коэффициент, однозначно определяемый через величину β
Помехи не влияют на частотномодулированный сигнал.
13. Фазовая модуляция электромагнитных колебаний.
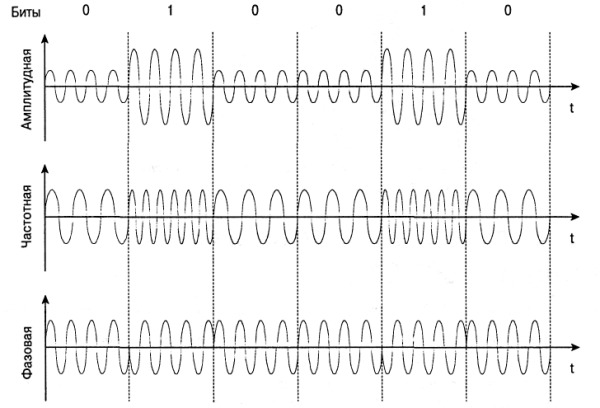
При фазовой модуляции под воздействием управлемого сигнала изменяется начальная фаза несущих колебаний. Уравнение для фазовой молуляции имеет следующий вид:

где Δψ- индекс фазовой модуляции. Частотная и фазовая модуляция описываются одинаковыми математическими выражениями. Поэтому особенности прохождения модулируемых несущих колебаний как через атмосферу, так и по эл. цепям дальномерам одинаковы. Индексы модуляции Δψ,β по разному зависят от параметров модул. сигнала.